一种顶升式AGV的控制方法及装置与流程
一种顶升式agv的控制方法及装置
技术领域
1.本发明主要涉及运输工具技术领域,具体涉及一种顶升式agv的控制方法及装置。
背景技术:
2.agv运输车是装备有电磁或激光等自动导引装置,不需要人工驾驶,能够沿规定的导引路径行驶到达指定地点,完成一系列的作业任务,是工厂中实现物料运输自动化的主要装备之一,尤其适用于仓储业、制造业、医药等行业的物流运输过程中。
3.传统的顶升式agv都是基于电磁导引和激光导引两种导引方式而设计的,这两种导引方式都是让顶升式agv在预设轨道上行驶。然而,由于顶升式agv电磁导航线路是一次铺设的,后续需要修改线路时必须执行二次作业,激光导引则需要通过改变反光板的位置从而改变轨道线路,这两种路线变更方式不灵活,使得传统的顶升式agv受到预设轨道的限制,无法根据搬运需求灵活更改搬运路径,从而影响顶升式agv的搬运效率;因此需要一种能提升搬运效率的顶升式agv。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,本发明提供了一种顶升式agv的控制方法及装置,通过设定工作模式,能够实现更换搬运路线灵活化,提升搬运效率。
5.本发明提供了一种顶升式agv的控制方法,所述顶升式agv的控制方法包括:
6.获取工作环境信息,根据工作环境信息,确定所述顶升式agv的工作模式;
7.所述工作模式包括导引工作模式、自动导航工作模式和一体化工作模式;
8.根据所述工作模式进行工作路径规划,确定工作路径;
9.在所述导引工作模式下,所述顶升式agv按照预设轨道设定工作路径进行搬运工作;
10.在所述自动导航工作模式下,所述顶升式agv通过自主规划工作路径进行搬运工作;
11.在所述一体化工作模式下,所述顶升式agv结合所述导引工作模式和所述自动导航工作模式确定工作路径进行搬运工作;
12.沿所述工作路径进行搬运,完成搬运工作。
13.进一步的,所述获取工作环境信息,根据工作环境信息,确定所述顶升式agv的工作模式,包括:
14.获取工作环境信息,对所述工作环境信息进行预处理,确定搬运工作路线和障碍物的位置信息;
15.将所述搬运工作路线和障碍物的位置信息与预设的路径信息进行对比,确定所述顶升式agv的工作模式。
16.进一步的,所述确定障碍物的位置信息,包括:通过所述激光雷达模块和超声波传感器模块识别障碍物。
17.进一步的,所述将搬运工作路线和障碍物的位置信息与预设的路径信息进行对比,包括:
18.路径匹配且路径上无障碍物,采用导引工作模式;
19.或路径不匹配,采用自动导航工作模式;
20.或路径匹配但路径上有障碍物,采用一体化工作模式。
21.进一步的,所述导引工作模式包括:电磁导引工作模式和激光导引工作模式;
22.在所述电磁导引工作模式下,所述顶升式agv按照预电磁轨道进行搬运工作;
23.在所述激光导引工作模式下,所述顶升式agv在导引区域内按照预设的轨道进行搬运工作。
24.进一步的,所述顶升式agv通过自主规划工作路径进行搬运工作,包括:
25.对所述工作环境布局进行标点处理,获取标点处理后的工作环境布局;
26.对标点处理后的工作环境布局进行路径规划。
27.进一步的,所述对工作环境布局进行标点处理,包括在所述工作环境布局上标定工作起点和工作终点,或在所述工作环境布局中标定若干个路径点。
28.进一步的,所述标点处理包括基于标点函数在所述工作环境布局中进行标点处理,或基于通信模块接收操作人员设定的标点信息。
29.进一步的,所述对标点处理后的工作环境布局进行路径规划,包括:
30.在所述导引工作模式下,预设轨道即是工作路径;
31.在所述自动导航模式下,基于dijkstra算法获取任意两个相邻路径点之间的最短路径,通过多个所述最短路径构成所述工作路径。
32.在所述一体化工作模式下,结合预设轨道和基于dijkstra算法获取任意两个相邻路径点之间的最短路径,通过多个所述最短路径和所述预设轨道构成所述工作路径。
33.本发明还提供了一种顶升式agv的控制装置,所述控制装置包括:
34.工作模式设定模块:获取工作环境信息,根据工作环境信息,确定所述顶升式agv的工作模式,所述工作模式包括导引工作模式、自动导航工作模式和一体化工作模式;
35.路径规划模块:根据所述工作模式进行工作路径规划,确定工作路径;
36.在所述导引工作模式下,所述顶升式agv按照预设轨道进行搬运工作;
37.在所述自动导航工作模式下,所述顶升式agv通过自主规划工作路径进行搬运工作;
38.在所述一体化工作模式下,所述顶升式agv结合所述导引工作模式和所述自动导航工作模式确定工作路径进行搬运工作;
39.工作模块:沿所述工作路径进行搬运,完成搬运工作。
40.本发明提供了一种顶升式agv的控制方法及装置,通过设定工作模式,能够实现更换搬运路线灵活化,提升搬运效率。
附图说明
41.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见的,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以
根据这些附图获得其它的附图。
42.图1是本发明实施例中的顶升式agv的结构示意图;
43.图2是本发明实施例中的顶升式agv的后视图;
44.图3是本发明实施例中的底板的示意图;
45.图4是本发明实施例中的底板的下视图;
46.图5是本发明实施例中的顶升机构的剖面图;
47.图6是本发明实施例中的顶升机构的下视图;
48.图7是本发明实施例中的驱动装置的示意图;
49.图8是本发明实施例中的顶升式agv的控制方法的流程图;
50.图9是本发明实施例中的工作路径规划方法流程图;
51.图10是本发明实施例中的顶升式agv的工作流程;
52.图11是了本发明实施例中顶升式agv的控制装置示意图。
具体实施方式
53.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
54.请参阅图1-4,图1示出了本发明实施例中的顶升式agv的结构示意图,图2示出了本发明实施例中的顶升式agv的后视图,图3示出了本发明实施例中的底板的示意图,图4示出了本发明实施例中的底板的下视图。
55.具体的,所述顶升式agv,其特征在于,包括:车体1、顶升机构143、激光雷达144、磁导航传感器142、二维码读码器141和工控机145,其中:所述车体1包括底板14、上壳11、中壳12和下壳13,所述中壳12位于所述上壳11和下壳13之间,所述上壳11、中壳12和下壳13之间形成有一个容纳槽,所述底板14为主要承载结构,用于负载整机的重量和工作载荷;所述激光雷达144设置在所述底板14上,且位于所述容纳槽内;所述底板14设置有第一腔体和第二腔体,所述第一腔体中设置有所述磁导航传感器142,所述第二腔体中设置有所述二维码读码器141,这里的磁导航传感器142和二维码读码器141,用于顶升式agv偏移磁轨道后,通过读码器读取磁轨道附近的二维码,纠正顶升式agv行进路径;所述工控机145设置在所述上壳11内,为控制系统的核心,其内部安装有安卓操作系统及相关软件;所述顶升机构143固接在所述底板14上。
56.需要说明的是,所述激光雷达144包括激光雷达支撑板1441和激光雷达1442,所述激光雷达1442设置在所述激光雷达支撑板1441上,所述激光雷达1442与所述工控机145连接通信,把实时获取的行驶环境信息发送到工控机145,所述工控机145根据所述行驶环境信息,基于slam算法调整顶升式agv的行进路线,实现主动避障的目的,所述激光雷达支撑板1441设置在所述底板14上,用于实现支撑和固定激光雷达1442的目的。
57.需要说明的是,所述slam算法是一种实现定位、建图、路径规划的算法,用于解决在未知环境运动时通过对环境的观测确定自身的运动轨迹,同时构建环境地图的问题。
58.具体的,所述上壳11有一容纳所述顶升托板1431的第五腔体,用于实现顶升托板
1431升降的目的,所述上壳的四角均设置有灯条112,用于实现显示运行状态的目的,所述上壳11还设置有显示屏111,用于实现人机交互的目的。
59.具体的,所述中壳12设置有wifi天线121和5g天线122,用于与远程终端通讯,并接受远程终端的遥控。所述5g天线122和wifi天线121可以增强所述工控机145接收所述5g信号和wifi信号的能力,所述顶升式agv可以通过所述无线通信组件与操作人员的移动终端进行无线通信,接收所述移动终端的指令并基于所述指令进行运动。
60.需要说明的是,wifi为无线网络通信,通过wifi模块可以构建无线网络通信,接入该无线网络的设备之间可以进行信息交互。
61.需要说明的是,第五代移动通信技术(5th generation mobile communication technology,简称5g)是具有高速率、低时延和高可靠性特点的新一代宽带移动通信技术,是实现人机物互联的网络基础设施。
62.具体的,所述下壳13的圆周外壁上设置有若干个防撞胶条131,所述防撞胶条131设置在所述下壳的四角上,用于实现胶条碰击到物体时,立即停止顶升式agv运行的目的。
63.更多的,所述下壳13设置有充电电极133,所述充电电极133位于所述下壳13的一端侧壁上。
64.更多的,所述下壳13设置有第一超声波传感器阵列132和第二超声波传感器阵列134,所述第一超声波传感器阵列132设置在所述下壳13的一端侧壁上,所述第二超声波传感器阵列134设置在在所述下壳13的另一端侧壁上,所述第一超声波传感器阵列132和所述充电电极133位于同一侧,
65.需要说明的是,所述第一超声波传感器阵列132包括若干个第一超声波传感器1321,所述第二超声波传感器阵列134包括若干个第二超声波传感器1341。所述超声波传感器与所述工控机145连接通信,把实时获取的行驶环境信息发送到工控机145,所述工控机145根据所述行驶环境信息,基于slam算法调整顶升式agv的行进路线,实现主动避障的目的。
66.更多的,请参阅图5-6,图5示出了本发明实施例中的顶升机构的剖面图,图6示出了本发明实施例中的顶升机构的下视图。
67.具体的,所述顶升机构143包括螺母1436、丝杠1434、顶升托板1431、顶升电机1432、连接杆1433和顶升机构支撑板1435,所述顶升电机1432和所述底板14固接,所述螺母1436和丝杠1434设置在所述顶升电机1432上,所述螺母1433的外壁设置有连接杆1433,所述顶升托板1431设置在所述连接杆1433上,所述螺母1436的内壁设置有内螺纹结构,所述丝杠1434的表面设置有外螺纹结构,所述螺母1436和所述丝杠1434基于所述内螺纹结构与所述外螺纹结构螺接配合。
68.更需要说明的是,所述顶升电机包括顶升电机驱动器14323、第一齿轮14321、第二齿轮1437和连接板14322,所述顶升电机驱动器14323的输出端上设置有所述第一齿轮14321,所述第二齿轮1437与第一齿轮14321啮合,所述第二齿轮1437固定设置在所述丝杠1434外壁上,所述顶升电机驱动器14323驱动所述第一齿轮14321时,带动所述第二齿轮1437转动,从而导致所述丝杠1434转动,所述丝杠1434带动所述螺母1436升降,导致所述连接杆1433带动所述顶升托板1431升降,从而使所述顶升机构143实现升降顶升托板1431的目的。
69.这里的顶升电机驱动器14323和第一齿轮14321设置在所述连接板14322上,所述连接板14322连接所述顶升机构支撑板1435,这样设计是为了支撑所述顶升机构143,使所述顶升机构143固定在所述底板14上。
70.具体的,底板14上设置有电源装置148,所述电源装置包括锂电池1481和电池仓1482,所述锂电池1481设置在所述电池仓1482内,所述电池仓1482设置在所述底板14上,用于为顶升式agv提供电源。
71.具体的,所述底板14的四角上均设置有万向轮组件146,所述万向轮组件包括万向轮固定座1461和万向轮1462,所述万向轮固定座1461为半封闭圆柱体,开口向下设置在所述底座14上,所述万向轮1462设置在所述万向轮固定座1461内,这里的万向轮1461为偏心万向轮,实现顶升式agv转向灵活的目的。
72.具体的,所述底板14上还设置有驱动装置147,所述驱动装置147分为第一驱动装置1471和第二驱动装置1472,所述第一驱动装置1471设置在所述底板14的一侧,所述第二驱动1471装置设置在底板14的另一侧。
73.需要说明的是,图7示出了本发明实施例中的驱动装置的示意图,所述驱动装置147包括驱动轮组件14711、减速器14712和驱动轮电机14713,所述减速器一端连接所述驱动轮组件14711,另一端连接所述驱动轮电机14713。这里的驱动装置可以通过差速驱动实现顶升式agv的转向和掉头,还可以实现前进、后退和零半径转向的目的,使顶升式agv动作更灵活。
74.具体的,所述驱动轮组件14711包括悬架组件147111和驱动轮147112,所述驱动轮147112设置在所述悬架组件147111内。
75.需要说明的是,所述悬架组件147111包括悬架安装板1471111、第一悬架支撑板1471112、第二悬架支撑板1471113和滑座1471114,其中:所述悬架安装板1471111一端连接所述第一悬架支撑板1471112,另一端连接所述第二悬架支撑板1471113,所述第一悬架支撑板1471112和第二悬架支撑板1471113设置在所述底板14上,这里支撑板把悬架组件147111固定在所述底板14上;所述滑座1471114分为第一滑座14711141和第二滑座14711142;所述悬架安装板1471111内设置有驱动轮147112,所述驱动轮147112一侧设置有第一滑座14711141,另一侧设置有第二滑座14711142,所述第一滑座14711141和第二滑座14711142位于悬架安装板下1471111,所述第一滑座14711141和所述第二滑座14711142基于滑座连接板14711143连接。这里的悬架组件为弹簧滑座式,增加了顶升式agv的地面自适应能力。
76.需要说明的是,所述滑座1471114包括导杆14711144和弹簧杆14711145,所述滑座1471114插接有导杆14711144和弹簧杆14711145,所述悬架安装板1471111设置有容纳所述导杆14711144的第三腔体和容纳所述弹簧杆14711145的第四腔体,用于实现顶升式agv的避震效果;所述导杆14711144顶部固定在所述第三腔体内,用于固定所述滑座1471114的位置,实现限位的目的。
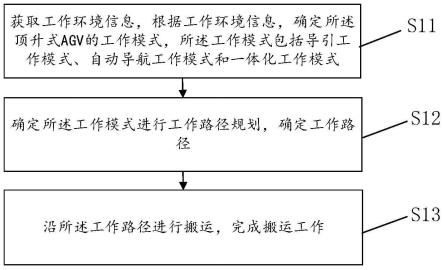
77.更多的,图8示出了本发明实施例中的顶升式agv的控制方法的流程图,所述顶升式agv的控制方法包括:
78.s11:获取工作环境信息,根据工作环境信息,确定所述顶升式agv的工作模式,所述工作模式包括导引工作模式、自动导航工作模式和一体化工作模式。
79.具体的,所述导引工作模式包括:电磁导引工作模式和激光导引工作模式,在所述电磁导引工作模式下,所述顶升式agv按照预电磁轨道进行搬运工作,在所述激光导引工作模式下,所述顶升式agv在导引区域内按照预设的轨道进行搬运工作。
80.具体的,获取工作环境信息,对所述工作环境信息进行预处理,确定搬运工作路线和障碍物的位置信息,将所述搬运工作路线和障碍物的位置信息与预设的路径信息进行对比,确定所述顶升式agv的工作模式。
81.进一步的,所述顶升式agv可以基于通信模块接收操作人员发送的预设路径信息。操作人员可以在移动终端上设定相应的预设路径信息,所述顶升式agv可以通过wifi通信模块和5g通信模块连接所述操作人员的移动终端,并接收所述移动终端上发出的预设路径信息,从而获取所述预设路径信息。
82.进一步的,所述预设路径信息包括铺设在工作现场的电磁轨道和光学导引轨道。
83.进一步的,所述超声波传感器通过向四周发出超声波,所述超声波接触障碍物时向所述超声波传感器反馈,从而可以识别所述障碍物所在的位置。
84.进一步的,所述激光雷达向四周发射出激光射线,通过接收物体表面发射回来的激光射线,从而获取障碍物信息。
85.进一步的,通过所述超声波传感器和所述激光雷达配合,可以提高所述顶升式agv的避障能力。
86.进一步的,所述超声波传感器可以通过poe接口与所述工控机连接,所述超声波传感器也可以通过usb接口与所述工控机连接,所述工控机可以接收所述超声波传感器的感测信息,同时为所述超声波传感器供电。
87.进一步的,poe(power over ethernet)指的是在现有的以太网布线基础架构不作任何改动的情况下,在传输数据信号的同时,还能为设备提供直流供电的技术。
88.进一步的,通用串行总线(universal serial bus,usb)是一种标准的数据通信方式。
89.具体的,所述工控机根据所述感测信息,确定所述顶升式agv的搬运起点和终点,以及所述搬运起点和终点之间的障碍物信息。
90.进一步的,所述工控机将所述搬运起点和终点,以及所述障碍物信息与所述预设的路径信息进行对比,所述工控机将所述预设路径信息和所述感测信息对比,如路径匹配且路径上无障碍物时,采用导引工作模式;如路径不匹配时,采用自动导航工作模式;如路径匹配但路径上有障碍物时,采用一体化工作模式。
91.进一步的,所述路径匹配指所述预设的路径信息中的电磁轨道或光学导引轨道对应经过所述搬运起点和终点。
92.s12:根据所述工作模式进行工作路径规划,确定工作路径。
93.具体的,在所述导引工作模式下,所述顶升式agv按照预设轨道设定工作路径进行搬运工作。
94.进一步的,所述工控机确定所述预设的路径信息中,经过所述搬运起点和终点的电磁轨道或光学导引轨道,所述顶升式agv在导引工作模式下,沿所述电磁轨道或光学导引轨道完成搬运工作。
95.具体的,在所述自动导航工作模式下,所述顶升式agv通过自主规划工作路径进行
搬运工作。
96.进一步的,所述工控机接收操作人员设定的标点数据信息,基于dijkstra算法自主规划最短的工作路径,进行搬运工作。
97.在所述一体化工作模式下,所述顶升式agv结合所述导引工作模式和所述自动导航工作模式确定工作路径进行搬运工作。
98.进一步的,所述顶升式agv先按照所述工控机确定的所述预设的路径信息行驶一段距离,直至遇到障碍物,遇到障碍物后自主规划绕开障碍物的最短路径,然后再次行驶到预设轨道上继续完成搬运工作。
99.具体的,图9示出了本发明实施例中的工作路径规划方法流程图,所述顶升式agv通过自主规划工作路径进行搬运工作,包括:
100.s121:对所述工作环境布局进行标点处理,获取标点处理后的工作环境布局;
101.具体的,所述工控机可以通过标点函数在所述工作环境布局中进行标点工作,
102.进一步的,所述工控机可以基于通信模块接收操作人员设定的标点数据信息。操作人员可以在移动终端上对工作环境布局进行手动标点操作,包括设定工作起点和工作终点,以及设定所述若干个路径点,用于所述顶升式agv自主规划最短工作路径。
103.s122:对标点处理后的工作环境布局进行路径规划。
104.具体的,在所述导引工作模式下,预设轨道即是工作路径;在所述自动导航模式下,基于dijkstra算法获取任意两个相邻路径点之间的最短路径,通过多个所述最短路径构成所述工作路径。在所述一体化工作模式下,结合预设轨道和基于dijkstra算法获取任意两个相邻路径点之间的最短路径,通过多个所述最短路径和所述预设轨道构成所述工作路径。
105.需要说明的是,所述dijkstra算法又名狄克斯特拉算法,是从一个顶点到其余各顶点的最短路径算法,解决的是有向图中最短路径问题。
106.具体的,图10示出了本发明实施例中的顶升式agv的工作流程图,通过所述激光雷达模块和超声波传感器模块识别障碍物,进行自动避障导航,完成所述喷洒工作。
107.具体的,所述顶升式agv的工作流程为:开机并启动系统,通过设置参数,所述参数包括顶升式agv的姿态,移动速度、行驶里程等,通过建图生成工作环境布局,在确定搬运任务后,通过定位导航进行搬运作业,确定搬运任务是否完成,若完成搬运任务则进入待机状态,等待下一个搬运任务,或关闭系统,进入关机状态。若搬运任务未完成则通过定位导航确定工作路径完成搬运工作。
108.本发明实施例还提供了一种顶升式agv的控制装置,图11示出了本发明实施例中顶升式agv的控制装置示意图,所述控制装置包括:
109.工作模式设定模块10:获取工作环境信息,根据工作环境信息,确定所述顶升式agv的工作模式,所述工作模式包括导引工作模式、自动导航工作模式和一体化工作模式;
110.路径规划模块20:根据所述工作模式进行工作路径规划,确定工作路径;
111.在所述导引工作模式下,所述顶升式agv按照预设轨道进行搬运工作;
112.在所述自动导航工作模式下,所述顶升式agv通过自主规划工作路径进行搬运工作;
113.在所述一体化工作模式下,所述顶升式agv结合所述导引工作模式和所述自动导
航工作模式确定工作路径进行搬运工作;
114.工作模块30:沿所述工作路径进行搬运,完成搬运工作。
115.本发明实施例提供了一种顶升式agv的控制方法及装置,通过设定工作模式,能够实现更换搬运路线灵活化,提升搬运效率。
116.本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于一计算机可读存储介质中,存储介质可以包括:只读存储器(rom,readonly memory)、随机存取存储器(ram,random access memory)、磁盘或光盘等。
117.另外,以上对本发明实施例所提供的一种顶升式agv的控制方法及装置进行了详细介绍,本文中采用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1