基于大型无人直升机平台的智能海上巡查搜救系统及方法与流程
1.本技术属于海上救援技术领域,具体涉及一种基于大型无人直升机平台的智能海上巡查搜救系统及方法。
背景技术:
2.伴随着时代的不断发展以及科技的不断进步,海上搜救工作也逐渐的广泛应用先进科学技术来提升救援效率,采取直升机救援的方式十分高速有效,能够满足救援工作的紧急需要。近年来在救援及处置突发事件的各项措施中,航空救援具有快速、高效、受地理空间限制较少的优势,成为世界很多国家普遍采用的救援手段。
3.海上人员落水后,容易受到海水侵蚀和海洋生物攻击等伤害,长时间的浸泡对落水人员的生命安全构成严重威胁,茫茫大海中,如果单个人员落水也不易搜查,因此落水人员的搜救任务非常艰难。相较于传统海上救助拖轮的巡航方式,直升机的巡航速度较快,能够第一时间到达事故现场,缩短了救援时间,使船只偏移与理论误差得到减小,降低救援难度。而目前的无人机海上救援仍存在着一些问题,例如:巡航距离短不能长时间续航;不能提供夜航救助等等。
技术实现要素:
4.本技术提出了一种基于大型无人直升机平台的智能海上巡查搜救系统及方法;通过无人直升机平台搭载搜寻救援设备,进行海上落水人员的搜查救援工作。
5.为实现上述目的,本技术提供了如下方案:
6.一种基于大型无人直升机平台的智能海上巡查搜救系统,包括:无人机平台和地面控制平台;
7.所述无人机平台用于采集海面实时信息,并将所述信息传输至地面控制台;
8.所述地面控制台用于接收所述信息,并基于所述信息发出控制指令。
9.优选的,所述无人机平台包括:无人机机体;
10.所述无人机机体包括:测控系统、成像系统、处理系统、雷达系统和物资投放系统;
11.所述测控系统与所述地面控制平台连接,所述测控系统用于接收所述控制指令,并基于所述控制指令进行无人机机体控制;
12.所述成像系统与所述测控系统连接,所述成像系统用于采集实时图像信息;
13.所述处理系统与所述成像系统、所述测控系统连接,所述处理系统用于处理海面所述实时信息;
14.所述雷达系统与所述处理系统连接,所述雷达系统用于采集海面与地形信息;
15.所述物资投放系统与所述测控系统、所述处理系统连接,所述物资投放系统用于对待救援人员投放救援物资。
16.优选的,所述测控系统包括:传输模块、控制模块和测量模块;
17.所述测量模块与所述传输模块连接,所述测量模块用于采集气象信息;
18.所述传输模块与所述地面控制平台连接,所述传输模块用于无人机平台与地面控制平台进行信息传输;
19.所述控制模块与所述传输模块连接,所述控制模块用于基于所述控制指令,对所述无人机机体进行控制操作。
20.优选的,所述测量模块包括:风速传感器、若干个温度传感器和湿度传感器;
21.所述风速传感器用于测量大气风速;
22.所述温度传感器用于测量大气温度以及所述无人机机体温度;
23.所述湿度传感器用于采集大气湿度。
24.优选的,所述成像系统包括:图像采集模块和热成像模块;
25.所述图像采集模块用于采集实时海面信息;
26.所述热成像模块用于捕获生命体信息。
27.优选的,所述处理系统包括:姿态计算模块、燃油计算模块、三维地形构建模块和分析模块;
28.所述姿态计算模块用于基于所述大气风速调整飞行姿态;
29.所述燃油计算模块用于基于剩余燃油量计算剩余飞行时长;
30.所述三维地形构建模块用于基于所述海面与地形信息绘制三维地形图;
31.所述分析模块用于分析投放所述救援物资的投放角度。
32.优选的,所述物资投放系统包括:救援物资和机械手;
33.所述救援物资包括饮用水、急救包及救生圈;
34.所述机械手用于投放所述救援物资。
35.本技术还提供一种基于大型无人直升机平台的智能海上巡查搜救方法,包括以下步骤:
36.s1、无人机平台实时采集海面图像、地形信息,将所述图像、地形信息传输至地面控制平台;
37.s2、地面控制平台基于所述图像、地形信息,制定救援计划实施救援。
38.本技术的有益效果为:
39.本技术无人直升机由地面控制平台直接控制,可以将实时信息第一时间传输至地面控制平台,以便地面控制平台能够实时、准确掌控态势、制定救援计划;本技术的智能海上巡查搜救系统通过采集实时图像及热成像相结合的方法,保证了搜寻的准确性和高效性;同时配备的雷达装备能够获取搜救点的三维地形图,为地面控制平台制定救援计划提供地形信息。
附图说明
40.为了更清楚地说明本技术的技术方案,下面对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
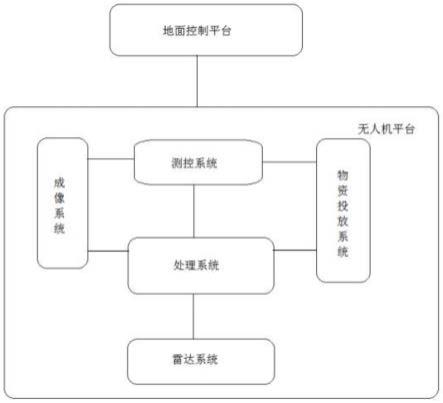
41.图1为本技术基于大型无人直升机平台的智能海上巡查搜救系统结构示意图;
42.图2为本技术基于大型无人直升机平台的智能海上巡查搜救方法流程示意图。
具体实施方式
43.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
44.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本技术作进一步详细的说明。
45.相较于有人直升机救援,无人直升机救援有着其独有的优势;直升机海上搜救作为一项融技术性、风险性和操作性为一体的技术工作,在依托先进设备保障的同时,还必须强化飞行员、机务人员的技能培训,有人直升机要求飞行员在进行飞行控制时还要及时将信息反馈地面;对飞行员的专业要求严格,而飞行员、机务人员需要10年甚至更长的时间才能成熟。而无人直升机地面操控人员的训练周期短,且无人直升机具备自动返航等智能化功能,安全程度高;且无人直升机与有人直升机相比,造价低,可以根据实际需求搭载不同的专业仪器进行任务巡航救援,适合大面积推广。跟其他无人飞行器相比,无人直升机的巡航时间长,巡航距离较远,能够实现常态化持续部署。
46.本技术通过利用无人直升机救援速度快、巡航时间长、搜救视野广、受风浪影响小的特点,提出一种基于大型无人直升机平台的智能海上巡查搜救系统和方法。
47.实施例一
48.如图1所示,为本技术基于大型无人直升机平台的智能海上巡查搜救系统结构示意图,包括:无人机平台和地面控制平台;
49.其中无人机平台包括无人机机体;无人机机体包括:测控系统、成像系统、处理系统、雷达系统和物资投放系统;
50.测控系统包括传输模块、控制模块和测量模块;
51.传输模块通过微波散射技术实现无人机平台与地面控制平台之间的通信;
52.控制模块与传输模块和物资投放系统连接,控制模块根据地面控制平台传输的控制指令控制无人直升机的飞行及物资的投放。
53.测量模块与传输模块连接,测量模块包括:风速传感器、若干个温度传感器和湿度传感器;风速传感器用于测量大气风速;当风速超过设定范围影响到无人直升机的飞行状态时,将风速预警信息传输至地面控制平台等待控制指令;同时姿态计算模块根据风速传感器的风速数据进行无人直升机的姿态自我调整。
54.温度传感器用于测量大气温度以及无人机机体温度;温度传感器分别装配在无人直升机不同部位进行温度采集,分别采集大气温度及机体不同部位温度,当大气温度或机体温度高于设定值时将温度预警信息传输至地面控制平台,等待控制指令;湿度传感器用于采集大气湿度。
55.成像系统与测控系统连接,成像系统包括:图像采集模块和热成像模块;
56.图像采集模块包括机载用摄像机,图像采集模块用于实时采集海面视频图像,其中图像采集模块包括目标识别单元和船舶识别单元;目标识别单元用于识别特定目标;船舶识别单元用于识别船舶信息。图像采集模块通过传输模块与地面控制平台实时分享视频图像,当受到外部干扰导致连接中断时,对图像进行存储;当连接中断恢复时实时共享图像
视频;根据地面控制平台指令,可将中断时视频图像传输至地面控制平台。
57.热成像模块包括热成像仪,用于对采集生命体信息;热成像模块作为图像采集模块的补充,当进行海上救援任务时,出现物体遮挡或夜间光线不足等情况不能通过图像采集模块进行是否有落难人员时,通过热成像模块进行人员搜索;大大提高了人员搜救的效率与准确率。
58.处理系统与成像系统、测控系统连接;处理系统包括:姿态计算模块、燃油计算模块、三维地形构建模块和分析模块;
59.其中,姿态计算模块用于根据大气风速及时调整无人直升机飞行姿态,以在恶劣天气下保证无人直升机的安全飞行。
60.燃油计算模块用于计算剩余燃油能够支撑的巡航时间,燃油计算模块从燃油剩余一半开始计算,计算剩余巡航时间时排除10%的剩余油量。即无人直升机在巡航结束落地后仍余有至少10%油量。
61.三维地形构建模块用于基于雷达系统采集的地形信息绘制三维地形图;三维地形图用于为地面控制平台提供地形信息以帮助地面控制平台制定救援计划,以及救援路线的规划,保证了救援船或救援艇的行驶安全。同时三维地形图为无人直升机的降落提供了降落基础。
62.分析模块用于根据风速、飞行高度等信息计算投放救援物资的投放角度以保证待救援人员能够顺利拿到救援物资。
63.雷达系统用于采集海面与地形信息;其中海面信息包括是否存在油污现象;一方面当违法船开始违法排出油污水时,卫星监测不能第一时间发现,当油污带达到千米以上时,已经对海洋生态环境造成了污染;另一方面,当船舶出现故障时,当燃油开始泄露时,可能会引起爆炸等事件,当检测到油污时,意味着及时制定救援计划对遇困人员进行救援刻不容缓。同时雷达系统还用来采集地形信息,通过对雷达系统采集的地形信息进行处理,绘制三维地形图,可以帮助地面控制平台制定救援计划,以及救援路线的规划,保证了救援船或救援艇的行驶安全。
64.物资投放系统包括救援物资和机械手;当收到地面控制平台投放救援物资的控制指令时,分析模块结合风速、飞行高度、目标投放点等信息计算救援物资投放角度及力度;进行控制模块控制机械手投放救援物资。
65.实施例二
66.如图2所示,为本技术基于大型无人直升机平台的智能海上巡查搜救方法流程示意图;本实施例将结合系统详细介绍系统的工作过程。
67.s1、无人机平台实时采集海面图像、地形信息,将所述图像、地形信息传输至地面控制平台;
68.无人直升机收到巡航救援任务时在制定海域进行巡航,图像采集模块实时采集视频图像信息,雷达系统实时连续采集地形信息和海面信息,当发现遇难船只或遇难人员时,根据地面控制平台控制指令进行多方位信息采集,当遇难船只图像采集不能反映是否有遇难人员或遇难人员的具体方位时,通过热成像系统寻找生命体。当发现遇难人员时,通过地面控制平台控制指令,分析模块结合风速,高度、目标投放点等信息计算救援物资投放角度及力度;进行控制模块控制机械手投放救援物资。同时在巡航过程中,风速传感器实时测量
大气风速;当风速超过设定范围影响到无人直升机的飞行状态时,将风速预警信息传输至地面控制平台等待控制指令;同时姿态计算模块根据风速传感器的风速数据进行无人直升机的姿态自我调整。温度传感器实时测量大气温度以及无人机机体温度;温度传感器分别装配在无人直升机不同部位进行温度采集,分别采集大气温度及机体不同部位温度,当大气温度或机体温度高于设定值时将温度预警信息传输至地面控制平台,等待控制指令;湿度传感器实时采集大气湿度;燃油计算模块实时计算剩余燃油能够支撑的巡航时间。
69.三维地形构建模块根据雷达系统采集的地形信息绘制三维地形图,以帮助地面控制平台制定救援计划,及救援路线的规划,保证救援船或救援艇的救援过程中的行驶安全。
70.s2、地面控制平台基于所述图像、地形信息,制定救援计划实施救援。
71.地面控制平台根据无人直升机采集的各种信息下达指令,当需要进行海上救援时,根据上述信息制定救援计划实施救援。
72.以上所述的实施例仅是对本技术优选方式进行的描述,并非对本技术的范围进行限定,在不脱离本技术设计精神的前提下,本领域普通技术人员对本技术的技术方案做出的各种变形和改进,均应落入本技术权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1