一种飞机进气道曲面过渡生成方法和装置
1.本发明属于飞机进气道设计技术领域,尤其涉及一种飞机进气道曲面过渡生成方法和装置。
背景技术:
2.进气道作为航空发动机中与气流接触的首要部件,按一定的流量、流速和畸变向发动机供气,同时具有防砂、辅助隐身等功能。一个设计良好的飞行器进气道是至关重要的,它可让飞机在巡航过程中保持较大的迎角和侧滑,而不会干扰流向压缩机的气流。
3.传统进气道设计方法是基于先导经验对基本模型进行调整,并进行不同参数组合的风洞实验,以得到进气道在不同姿态下的气动性能数据,最后根据测试结果进行等比例进气道测试。然而,这种设计方法的缺点是无法对管道的走向、每个截面的面积、管道宽度等进行精确控制,难以采用参数化对进气道曲面进行精细化设计,使得进气道曲面无法满足设计和精度要求。
技术实现要素:
4.本发明针对现有技术中的不足,提供一种飞机进气道曲面过渡生成方法和装置
5.第一方面,本发明提供一种飞机进气道曲面过渡生成方法,包括:
6.自定义b样条形式的进气道关键截线和进气道关键截线的控制点和节点;所述关键截线包括进口截线、中间截线和出口截线;
7.对所述进气道关键截线进行c2光滑约束,得到进气道关键截线的控制点位置;
8.根据进气道关键截线的控制点位置构建进气道曲面拉普拉斯方程;
9.根据进气道曲面拉普拉斯方程计算关键界限控制点位置;
10.根据关键界限控制点位置对进气道曲面进行拟合过渡。
11.进一步地,所述对所述进气道关键截线进行c2光滑约束,得到进气道关键截线的控制点位置,包括:
12.提高进气道关键截线曲线度数,对具有n个控制点的p次b样条曲线进行一倍的度数提高,得到n=2n+2个控制点,m=n+p+1个节点向量;
13.根据曲线度数提高后的进气道关键截线的起始控制点和结尾控制点进行c2光滑约束:
[0014][0015]
其中,c
′
(0)为起始控制点的一阶导数;c
″
(0)为起始控制点的二阶导数;c
′
(1)为结尾控制点的一阶导数;c
″
(1)为结尾控制点的二阶导数;给定n+1个控制点分别为p0,p1,p2,...,pn;p0为起始控制点的值;pn为结尾控制点的值;u
p+1
为第p+1个节点;p
n-1
为第n-1个控制点的值;为p0的二阶导数;为p2的零阶导数;为p0的一阶导数;p
1(1)
为p1的一阶导数;为p0的零阶导数;p
1(0)
为p1的零阶导数。
[0016]
进一步地,所述根据进气道关键截线的控制点位置构建进气道曲面拉普拉斯方程,包括:
[0017]
构建b样条参数域到物理域参数映射:
[0018][0019]
其中,若d取1,则代表b样条曲线参数范围为(0,1),若d取2,代表b样条曲面参数范围为共同构成的矩形面积(0,1)2;为b样条函数表达式,对应为u为b样条曲面行所在方向上节点的范围,即ω=c(u),为u;c(u)和均为b样条函数表达式;n
i,p
(u)为伯恩斯坦基函数;pi为第i个控制点的值;span为张成的空间;
[0020]
构建b样条曲面s(u,v):
[0021][0022]
b样条曲面s(u,v)物理域和参数域相同,即构建b样条曲面s(u,v)在物理域ω的拉普拉斯方程,并将关键截线作为狄利克雷边界条件:
[0023][0024]
其中,v为b样条曲面列所在方向上节点的范围;c1(u)、c2(u)、c3(u)和c4(u)分别为关键截线的b样条曲线形式;和分别为四条边界线取值。
[0025]
第二方面,本发明提供一种飞机进气道曲面过渡生成装置,包括:
[0026]
自定义模块,用于自定义b样条形式的进气道关键截线和进气道关键截线的控制点和节点;所述关键截线包括进口截线、中间截线和出口截线;
[0027]
光滑约束模块,用于对所述进气道关键截线进行c2光滑约束,得到进气道关键截线的控制点位置;
[0028]
构建模块,用于根据进气道关键截线的控制点位置构建进气道曲面拉普拉斯方程;
[0029]
计算模块,用于根据进气道曲面拉普拉斯方程计算关键界限控制点位置;
[0030]
拟合过渡模块,用于根据关键界限控制点位置对进气道曲面进行拟合过渡。
[0031]
进一步地,所述光滑约束模块包括:
[0032]
曲线度数提高单元,用于提高进气道关键截线曲线度数,对具有n个控制点的p次b样条曲线进行一倍的度数提高,得到n=2n+2个控制点,m=n+p+1个节点向量;
[0033]
光滑约束单元,用于根据曲线度数提高后的进气道关键截线的起始控制点和结尾控制点进行c2光滑约束:
[0034][0035]
其中,c
′
(0)为起始控制点的一阶导数;c
″
(0)为起始控制点的二阶导数;c
′
(1)为结尾控制点的一阶导数;c
″
(1)为结尾控制点的二阶导数;给定n+1个控制点分别为p0,p1,p2,...,pn;p0为起始控制点的值;pn为结尾控制点的值;u
p+1
为第p+1个节点;p
n-1
为第n-1个控制点的值;为p0的二阶导数;为p2的零阶导数;为p0的一阶导数;p
1(1)
为p1的一
阶导数;为p0的零阶导数;p
1(0)
为p1的零阶导数。
[0036]
进一步地,所述构建模块包括:
[0037]
第一构建单元,用于构建b样条参数域到物理域参数映射:
[0038][0039]
其中,若d取1,则代表b样条曲线参数范围为(0,1),若d取2,代表b样条曲面参数范围为共同构成的矩形面积(0,1)2;为b样条函数表达式,对应为u为b样条曲面行所在方向上节点的范围,即ω=c(u),为u;c(u)和均为b样条函数表达式;n
i,p
(u)为伯恩斯坦基函数;pi为第i个控制点的值;span为张成的空间;
[0040]
第二构建单元,用于构建b样条曲面s(u,v):
[0041][0042]
第三构建单元,用于在b样条曲面s(u,v)物理域和参数域相同,即的情况下,构建b样条曲面s(u,v)在物理域ω的拉普拉斯方程,并将关键截线作为狄利克雷边界条件:
[0043][0044]
其中,v为b样条曲面列所在方向上节点的范围;c1(u)、c2(u)、c3(u)和c4(u)分别为关键截线的b样条曲线形式;和分别为四条边界线取值。
[0045]
本发明提供一种飞机进气道曲面过渡生成方法和装置,其中方法包括自定义b样条形式的进气道关键截线和进气道关键截线的控制点和节点;所述关键截线包括进口截线、中间截线和出口截线;对所述进气道关键截线进行c2光滑约束,得到进气道关键截线的控制点位置;根据进气道关键截线的控制点位置构建进气道曲面拉普拉斯方程;根据进气道曲面拉普拉斯方程计算关键界限控制点位置;根据关键界限控制点位置对进气道曲面进行拟合过渡。本发明只需要提供关键界限控制点信息,即可得到过渡曲面;避免转换为ug软件规定的阵列点格式,直接将关键界限控制点信息导入ug软件,根据离散的控制点生成三维曲面;采用参数化对进气道曲面进行精细化设计,对管道的走向、每个截面的面积和管道宽度进行精确控制。
附图说明
[0046]
为了更清楚地说明本发明的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0047]
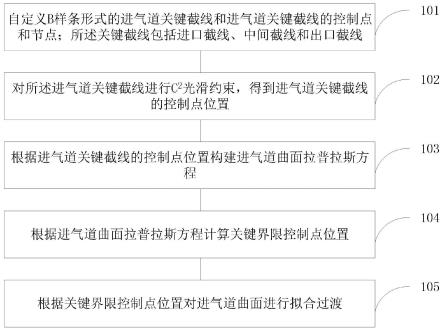
图1为本发明实施例提供的一种飞机进气道曲面过渡生成方法的流程图;
[0048]
图2为本发明实施例提供的一种飞机进气道曲面过渡生成方法的结构示意图;
[0049]
图3为本发明实施例提供的b样条封闭曲线c2光滑流程图示意图;
[0050]
图4为本发明实施例提供的参数域到物理等参数映射示意图;
[0051]
图5为本发明实施例提供的基于b样条形式的狄利克雷边界条件结果图;
[0052]
图6为本发明实施例提供的拉普拉斯方程计算结果示意图;
[0053]
图7为本发明实施例提供的一种飞机进气道曲面过渡生成装置的结构示意图。
具体实施方式
[0054]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0055]
如图1和图2所示,本发明实施例部分提供一种飞机进气道曲面过渡生成方法,包括:
[0056]
步骤101,自定义b样条形式的进气道关键截线和进气道关键截线的控制点和节点;所述关键截线包括进口截线、中间截线和出口截线。
[0057]
自定义b样条形式的进口截线的控制点和节点、中间截线的控制点和节点和出口截线的控制点和节点。
[0058]
步骤102,对所述进气道关键截线进行c2光滑约束,得到进气道关键截线的控制点位置。
[0059]
如图3所示,提高进气道关键截线曲线度数,即提高进口截线、中间截线和出口截线的曲线度数。对具有n个控制点的(p+1阶)p次b样条曲线进行一倍的度数提高,得到n=2n+2个控制点,m=n+p+1个节点向量。
[0060]
根据曲线度数提高后的进气道关键截线的起始控制点和结尾控制点进行c2光滑约束:
[0061][0062]
其中,c
′
(0)为起始控制点的一阶导数;c
″
(0)为起始控制点的二阶导数;c
′
(1)为结尾控制点的一阶导数;c
″
(1)为结尾控制点的二阶导数;给定n+1个控制点分别为p0,p1,p2,...,pn;p0为起始控制点的值;pn为结尾控制点的值;u
p+1
为第p+1个节点;p
n-1
为第n-1个控制点的值;为p0的二阶导数;为p2的零阶导数;为p0的一阶导数;p
1(1)
为p1的一阶导数;为p0的零阶导数;p
1(0)
为p1的零阶导数。
[0063]
步骤103,根据进气道关键截线的控制点位置构建进气道曲面拉普拉斯方程。
[0064]
如图4所示,构建b样条参数域到物理域参数映射:
[0065][0066]
其中,若d取1,则代表b样条曲线参数范围为(0,1),若d取2,代表b样条曲面参数范围为共同构成的矩形面积(0,1)2;为b样条函数表达式,对应为u为b样条曲面行所在方向上节点的范围,即ω=c(u),为u;c(u)和均为b样条函数表达式;n
i,p
(u)为伯恩斯坦基函数;pi为第i个控制点的值;span为张成的空间;b样条函数为n
i,p
(u)按照以pi为权重值的线性组合,即b样条函数为n
i,p
(u)张成的对应函数空间。
[0067]
构建b样条曲面s(u,v):
[0068][0069]
b样条曲面s(u,v)物理域和参数域相同,即如图5所示,构建b样条曲面s(u,v)在物理域ω的拉普拉斯方程,并将关键截线作为狄利克雷边界条件:
[0070][0071]
其中,v为b样条曲面列所在方向上节点的范围;c1(u)、c2(u)、c3(u)和c4(u)分别为关键截线的b样条曲线形式;和分别为四条边界线取值。
[0072]
步骤104,根据进气道曲面拉普拉斯方程计算关键界限控制点位置。
[0073]
步骤105,根据关键界限控制点位置对进气道曲面进行拟合过渡。
[0074]
如图6所示,得到关键界限控制点位置,使用ug软件进行建模,对进气道曲面进行拟合过渡。
[0075]
基于同一发明构思,本发明实施例还提供了一种飞机进气道曲面过渡生成装置,由于该装置解决问题的原理与前述一种飞机进气道曲面过渡生成方法相似,因此该装置的实施可以参见飞机进气道曲面过渡生成方法的实施,重复之处不再赘述。
[0076]
本发明一个实施例提供的飞机进气道曲面过渡生成装置,如图7所示,包括:
[0077]
自定义模块10,用于自定义b样条形式的进气道关键截线和进气道关键截线的控制点和节点;所述关键截线包括进口截线、中间截线和出口截线。
[0078]
光滑约束模块20,用于对所述进气道关键截线进行c2光滑约束,得到进气道关键截线的控制点位置。
[0079]
构建模块30,用于根据进气道关键截线的控制点位置构建进气道曲面拉普拉斯方程。
[0080]
计算模块40,用于根据进气道曲面拉普拉斯方程计算关键界限控制点位置。
[0081]
拟合过渡模块50,用于根据关键界限控制点位置对进气道曲面进行拟合过渡。
[0082]
可选地,所述光滑约束模块包括:
[0083]
曲线度数提高单元,用于提高进气道关键截线曲线度数,对具有n个控制点的p次b样条曲线进行一倍的度数提高,得到n=2n+2个控制点,m=n+p+1个节点向量;
[0084]
光滑约束单元,用于根据曲线度数提高后的进气道关键截线的起始控制点和结尾控制点进行c2光滑约束:
[0085][0086]
其中,c
′
(0)为起始控制点的一阶导数;c
″
(0)为起始控制点的二阶导数;c
′
(1)为结尾控制点的一阶导数;c
″
(1)为结尾控制点的二阶导数;给定n+1个控制点分别为p0,p1,p2,...,pn;p0为起始控制点的值;pn为结尾控制点的值;u
p+1
为第p+1个节点;p
n-1
为第n-1个控制点的值;为p0的二阶导数;为p2的零阶导数;为p0的一阶导数;p
1(1)
为p1的一阶导数;为p0的零阶导数;p
1(0)
为p1的零阶导数。
[0087]
可选地,所述构建模块包括:
[0088]
第一构建单元,用于构建b样条参数域到物理域参数映射:
[0089][0090]
其中,若d取1,则代表b样条曲线参数范围为(0,1),若d取2,代表b样条曲面参数范围为共同构成的矩形面积(0,1)2;为b样条函数表达式,对应为u为b样条曲面行所在方向上节点的范围,即ω=c(u),为u;c(u)和均为b样条函数表达式;n
i,p
(u)为伯恩斯坦基函数;pi为第i个控制点的值;span为张成的空间;
[0091]
第二构建单元,用于构建b样条曲面s(u,v):
[0092][0093]
第三构建单元,用于在b样条曲面s(u,v)物理域和参数域相同,即的情况下,构建b样条曲面s(u,v)在物理域ω的拉普拉斯方程,并将关键截线作为狄利克雷边界条件:
[0094][0095]
其中,v为b样条曲面列所在方向上节点的范围;c1(u)、c2(u)、c3(u)和c4(u)分别为关键截线的b样条曲线形式;和分别为四条边界线取值。
[0096]
关于上述各个模块更加具体的工作过程可以参考前述实施例公开的相应内容,在此不再进行赘述。
[0097]
以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1