一种自由曲面喷涂路径自动生成方法与装置与流程
1.本发明涉及机器人轨迹规划及自动喷涂领域,尤其是涉及一种自由曲面喷涂路径自动生成方法和装置。
背景技术:
2.多轴机器人经常用在复杂构件的喷涂场合,根据轨迹编程方式,可以将机器人喷涂应用分为人工示教和离线编程两种。手动示教得到的机器人喷涂轨迹具有可靠性高的特点,依赖操作者的经验,通常无法达到最佳喷涂效果。离线编程方法可以根据被喷涂工件的数字模型、工艺参数生成特定的喷涂轨迹,同时完成仿真验证,利于实现自动喷涂。
3.目前多数的自由曲面喷涂路径规划是对cad模型进行处理,进行曲面切块、切片,计算单元格的几何特征,得到路径点,生成喷涂轨迹。例如,一种喷涂成型过程中的刀具轨迹规划方法对标准cad模型进行三角化处理,得到工件的表面喷涂轨迹,该方法只对汽车内罩进行了测试,通常适用于已知标准cad模型的场合,不利于任意自由曲面点云数据的高效喷涂路径生成,适用范围窄,无法对不同情况的喷涂进行喷涂宽度的调整。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供的一种适用于任意自由曲面点云数据、喷涂宽度可调的自由曲面喷涂路径自动生成方法和装置。
5.本发明的目的可以通过以下技术方案来实现:
6.一种自由曲面喷涂路径自动生成方法,包括以下步骤:
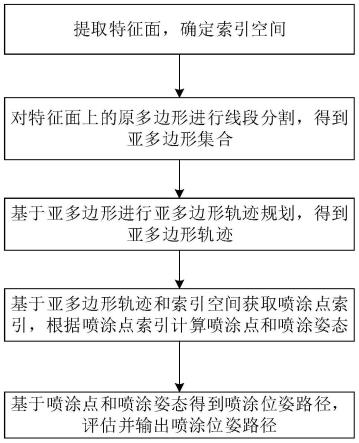
7.根据自由曲面点云数据提取特征面,根据特征面和自由曲面点云数据确定索引空间;
8.采用亚多边形划分的方法对所述特征面上的原多边形进行线段分割,得到多个亚多边形线段集合,所述亚多边形线段集合围成的面积和等于原多边形的面积和,所述亚多边形线段集合依次首尾相连得到亚多边形;
9.基于所述亚多边形进行亚多边形轨迹规划,得到亚多边形轨迹,基于所述亚多边形轨迹和索引空间获取喷涂点索引,根据喷涂点索引计算喷涂点和喷涂姿态,基于喷涂点和喷涂姿态得到喷涂位姿路径,评估并输出所述喷涂位姿路径;
10.其中,轨迹规划的过程为:
11.设置偏移线段,所述偏移线段在亚多边形外,且不与亚多边形相交;
12.基于喷涂宽度对亚多边形和偏移线段进行平行线划分,得到平行线集合,所述平行线集合中的每一条平行线互相平行,与亚多边形有2个交点,与偏移线段有1 个交点,所述平行线集合中的每一条平行线与偏移线段的交点的索引为该平行线的排列序号;
13.判断亚多边形上是否存在拐点,若存在,则过拐点向与拐点最接近的平行线作垂线,得到拐点延长线以及该平行线与该拐点延长线的交点;
14.基于平行线的排列序号,将平行线与亚多边形的交点和平行线与拐点延长线的交
点进行分组,得到每条平行线对应的交点集合,
15.筛选所述每条平行线对应的交点集合,得到每条平行线对应的路径点集合;
16.得到路径点集合后,根据之字形路径算法连接路径点集合中的路径点,得到亚多边形轨迹。
17.进一步地,采用亚多边形划分的方法对所述特征面上的原多边形进行线段分割的具体表达式为:
18.polygoni=divide(polygon
feat
),i∈1,...,n
[0019][0020]
其中,polygoni为划分得到的亚多边形,i为划分得到的亚多边形序号,divide 为划分函数,polygon
feat
为在特征面上的原多边形,n为划分得到的亚多边形总个数,aera为计算多边形包络面积函数。
[0021]
进一步地,所述设置偏移线段的约束条件为:
[0022][0023]
其中,i为划分得到的亚多边形序号,为偏移线段,polygoni为划分得到的第i个亚多边形,d
lploy
为偏移线段到亚多边形的距离,δ为偏移线段到亚多边形的最小偏移距离。
[0024]
进一步地,所述特征面的约束条件为:
[0025]
plane
feat
(x,y,z)=0:a
feat
x+b
feat
y+c
feat
z+d
feat
=0
[0026]
plane
feat
(x
p
,y
p
,z
p
)》0
[0027]
plane
feat
(x
np
,y
np
,z
np
)《0
[0028]
nz·
plane
feat
(x,y,z)=0
[0029]
plane
feat
(x
l
,y
l
,z
l
)=0
[0030]fl
=(n
x
,ny,nz)=pca(bp)
[0031]
其中,plane
feat
为平面函数,x、y和z为特征面上的点,a
feat
、b
feat
、c
feat
和d
feat
为平面系数,x
p
、y
p
和z
p
为点云区域中的点,x
np
、y
np
和z
np
为非点云区域中的点, f
l
为点云数据的局部坐标系,x
l
、y
l
和z
l
为局部坐标系中的点,n
x
、ny和nz为局部坐标系的三个坐标轴向量,pca为pac算法函数,bp为自由曲面点云。
[0032]
进一步地,筛选所述每条平行线对应的交点集合的约束条件为:
[0033][0034][0035]
其中,j为平行线的排列序号,pj为第j条平行线对应的交点,为计算平行线和亚多边形交点的函数,为平行线集合中的第j条平行线,polygoni为划分得到的第i个亚多边形,l
first
为polygoni的主方向直线。
[0036]
进一步地,根据之字形路径算法连接路径点集合中的路径点的计算式为:
[0037]
feat
p
dep
=zizg(∑pj)
[0038]
其中,
feat
p
dep
为特征面上的亚多边形轨迹,zizg为之字形路径算法,pj为第j条平行
线对应的交点。
[0039]
进一步地,所述确定索引空间具体为建立两个点集合统一的计数参考坐标系,并按照排列顺序一一对应,得到特征面投影点到自由曲面对应点的对应关系,将所述对应关系作为索引空间。
[0040]
进一步地,所述根据喷涂点索引计算喷涂点和喷涂姿态具体为:根据喷涂点索引计算自由曲面上对应的点的坐标和法向量,结合喷涂高度,计算出喷涂点和喷涂姿态。
[0041]
进一步地,所述评估喷涂位姿路径为对生成的喷涂位姿路径进行指标计算,得到加权评估指数,完成轨迹执行判断。
[0042]
一种自由曲面喷涂路径自动生成装置,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现上述的方法。
[0043]
与现有技术相比,本发明具有以下有益效果:
[0044]
(1)基于喷涂宽度对亚多边形和偏移线段进行平行线划分,根据得到的交点规划喷涂路径,整体的喷涂轨迹可以适应不同宽度需求的喷涂工作,实现通过喷涂轨迹控制输出不同宽度的喷涂位姿路径。
[0045]
(2)采用亚多边形划分能够对自由曲面点云数据进行处理,不限于已知标准 cad模型的场合。
附图说明
[0046]
图1为本发明的流程图;
[0047]
图2为本发明的提取特征面和确定索引空间示意图;
[0048]
图3为本发明的路径点提取过程图;
[0049]
图中,1自由曲面点云,2特征面,3上边界面,4下边界面,5机器人基坐标系,6虚投影面,7索引空间,8局部坐标系。
具体实施方式
[0050]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0051]
一种自由曲面喷涂路径自动生成方法,如图1所示,包括以下步骤:
[0052]
根据自由曲面点云数据提取特征面,根据特征面和自由曲面点云数据确定索引空间;
[0053]
采用亚多边形划分的方法对特征面上的原多边形进行线段分割,得到多个亚多边形线段集合,亚多边形线段集合围成的面积和等于原多边形的面积和,亚多边形线段集合依次首尾相连得到亚多边形;
[0054]
基于亚多边形进行亚多边形轨迹规划,得到亚多边形轨迹,基于亚多边形轨迹和索引空间获取喷涂点索引,根据喷涂点索引计算喷涂点和喷涂姿态,基于喷涂点和喷涂姿态得到喷涂位姿路径,评估并输出喷涂位姿路径。
[0055]
如图2所示,根据自由曲面点云1提取特征面2,根据特征面2和自由曲面点云1确定索引空间7的示意图。
[0056]
根据自由曲面点云数据提取特征面,根据特征面和自由曲面点云数据确定索引空间的具体步骤为:
[0057]
自由曲面点云1由3d结构光相机采集,并根据机器人坐标系与标手眼标定矩阵,由多个分块点云数据拼接成的,包含曲面几何信息的点集数据。将自由曲面点云1在机器人基坐标系5下进行表示。使用齐次变换表达各个坐标系变换关系,其中机器人末端中心坐标系至机器人基坐标系5的位姿变换表示为etb,该矩阵可以通过读取机器人控制系统的坐标信息得到;3d结构光相机坐标系至机器人末端中心坐标系的位姿变换表示为cte,该矩阵可以通过手眼标定得到。因此,可以得到自由曲面的局部点云在机器人基坐标系5下的表达:
[0058][0059]
式中,代表在相机坐标系下的自由曲面局部点云,bpi代表在机器人基坐标系5下的自由曲面局部点云。对机器人基坐标系5下的自由曲面局部点云bpi进行叠加,得到自由曲面整体点云在机器人基坐标系5下的表示:
[0060][0061]
特征面2是一种恰好区分点云区域与非点云区域的平面,即存在一平面:
[0062]
plane
feat
(x,y,z)=0:a
feat
x+b
feat
y+c
feat
z+d
feat
=0
[0063]
该平面的特点是可以区分点云区域与非点云区域,即:
[0064]
plane
feat
(x
p
,y
p
,z
p
)》0
[0065]
plane
feat
(x
np
,y
np
,z
np
)《0
[0066]
其中,plane
feat
为平面函数,a
feat
、b
feat
、c
feat
和d
feat
为平面系数,x
p
、y
p
和z
p
为点云区域中的点,x
np
、y
np
和z
np
为非点云区域中的点。
[0067]
特征面2提取是通过对不同的点云数据,计算其主方向,在主方向上寻找一个满足特征面特点的偏移平面。点云数据的主方向通常是利用pca算法实现,返回值是三个方向向量,经过校正后这三个向量的单位向量可以代表局部坐标系8的三个坐标轴,其表示如下:
[0068]fl
=(n
x
,ny,nz)=pca(bp)
[0069]
其中,f
l
为点云数据的局部坐标系,n
x
、ny和nz为局部坐标系的三个坐标轴向量,pca为pac算法函数,bp为自由曲面点云。
[0070]
特征面2与点云数据的主方向垂直,则有:
[0071]
nz·
plane
feat
(x,y,z)=0
[0072]
同时,局部坐标系9的原点在特征面上,有:
[0073]
plane
feat
(x
l
,y
l
,z
l
)=0
[0074]
其中,x、y和z为特征面上的点,x
l
、y
l
和z
l
为局部坐标系中的点。
[0075]
根据以上约束,即可提取特征面2。
[0076]
获取特征面2的基础上,利用局部坐标系8,可以计算得到上边界面3和下边界面4,满足:
[0077]nx
·
plane
up
(x,y,z)=0
[0078]nx
·
plane
down
(x,y,z)=0
[0079]
其中,n
x
代表局部坐标系8的x轴,plane
up
和plane
down
分别代表上边界面3 和下边
界面4。
[0080]
索引空间7是一种虚投影面6(即特征面2)投影点到自由曲面点云1对应点的对应关系。定义虚投影面6投影点到自由曲面点云1对应点之间的对应关系为:
[0081]
χ:
feat
p
→bp
[0082]
其中,χ代表虚投影面6投影点到自由曲面点云1对应点之间的对应关系,bp 代表自由曲面点云1。
[0083]
索引空间7确定方法是通过建立两个点集合统一的计数参考坐标系,并按照排列顺序一一对应。χ只存在一对一的对应关系,不存在其他对应关系。
[0084]
采用亚多边形划分的方法对特征面上的原多边形进行线段分割,得到多个亚多边形线段集合的具体步骤为:
[0085]
亚多边形是一种首尾依次相连的线段集合,是复合多边形的子集。这种多边形是一种闭合多边形,且满足在亚多边形的主方向满足单调性质,即在该方向的垂直方向上的任意直线与多边形的交点个数等于2,在多边形的顶点位置,两个交点重合。可以表达为以下形式:
[0086]
ξ(l
sec
,polygoni)=2||1,l
sec
·
l
first
=0
[0087]
其中,ξ代表求得直线与多边形的交点个数,l
first
代表亚多边形主方向直线,l
sec
代表亚多边形主方向的垂直方向上的任意直线,polygoni代表亚多边形。
[0088]
亚多边形划分方法是通过对原多边形进行特定的线段分割,组合出若干新的线段集合,这些新的线段集合围成的面积和,等于原多边形的面积和。
[0089]
可以表示为:
[0090]
polygoni=divide(polygon
feat
),i∈1,...,n
[0091][0092]
其中,polygoni代表划分得到的亚多边形,divide代表划分函数,polygon
feat
代表在特征面上的原多边形,i代表划分得到的亚多边形序号,n代表划分得到的亚多边形总个数,aera代表求多边形包络面积。
[0093]
如图3所示,基于亚多边形进行亚多边形轨迹规划,得到亚多边形轨迹的具体步骤为:
[0094]
step1设置偏移线段:
[0095]
偏移线段具有两个作用,其一是为了扩充亚多边形的边界,便于在平行线划分和拐点处理step2阶段获取于亚多边形的交点;其二是可以将平行线的索引映射到与偏移线段的交点上,便于表示平行线的序号。亚多边形上的点到偏移线段的最小距离应该大于一个阈值,以保证偏移线段不与亚多边形相交:
[0096][0097]
其中,d
lploy
(
·
,
·
)代表直线到多边形的距离,代表偏移线段,min代表求解数组的最小值,δ代表偏移线段到亚多边形的最小偏移距离。
[0098]
step2平行线划分:
[0099]
平行线划分和拐点处理是根据喷涂宽度和亚多边形来决定的,平行线集合中的每
一条平行线互相平行,平行线集合中的每一根直线与亚多边形有2个交点,与偏移线段有一个交点,即:
[0100][0101]
同时,平行线集合中的每一根直线与偏移线段的交点索引代表平行线的排列序号,即:
[0102][0103]
其中,inxj代表排列序号,代表两直线求交,代表平行线集合中的任意一根直线,代表亚多边形的偏移线段所在直线,j代表平行线序号,m代表平行线集合的元素个数。
[0104]
step3拐点处理:
[0105]
判断是否拐点,若存在,则过拐点向与拐点最接近的平行线作垂线,得到拐点延长线以及该平行线与该拐点延长线的交点。
[0106]
拐点按照主方向向量,分为上拐点和下拐点,此时拐点也是亚多边形的顶点,满足:
[0107][0108]
step4路径点提取:
[0109]
基于平行线的排列序号,将平行线与亚多边形的交点和平行线与拐点延长线的交点进行分组,得到每条平行线对应的交点集合。
[0110]
每条平行线满足:
[0111][0112]
其中,num(pj)代表每一组平行线交点的个数,代表求得直线与处理后的亚多边形的交点个数,代表平行线集合中的每一根直线,该平行线与亚多边形主方向直线l
first
垂直。
[0113]
筛选每条平行线对应的交点集合,得到每条平行线对应的路径点集合。
[0114]
得到路径点集合后,根据之字形路径算法连接路径点集合中的路径点,得到亚多边形轨迹:
[0115]
feat
p
dep
=zizg(∑pj)
[0116]
其中,
feat
p
dep
代表特征面上的亚多边形轨迹,zizg代表之字形路径算法,∑pj代表所有路径点。
[0117]
在得到已规划轨迹的基础上,将特征平面上的轨迹点按照排列顺序,通过索引空间在自由曲面上找到对应的点,作为喷涂点计算的基础。结合特征面投影点到自由曲面对应点之间的对应关系,可以表示为:
[0118]bp
dep
=χ(
feat
p
dep
)
[0119]
其中,bp
dep
代表自由曲面上的亚多边形轨迹,χ代表特征面投影点到自由曲面对应点之间的对应关系。
[0120]
喷涂点计算与喷涂方向计算表示在完成喷涂点索引的基础上,计算自由曲面上对
应的点的坐标和法向量,并结合喷涂高度,计算出喷涂点和喷涂方向,并用箭头表示。其中自由曲面点云包含了点的坐标信息,根据生成的亚多边形轨迹的索引,计算轨迹点处的法向量,组成以下形式:
[0121]btrack
dep
=(x,y,z,n
x
,ny,nz)=ψ(bp
dep
)
[0122]
其中,btrack
dep
代表自由曲面上的“之”字轨迹所包含的轨迹点坐标和法向量, x,y,z,n
x
,ny,nz代表点坐标和法向量集合,ψ代表根据生成的亚多边形轨迹的索引,计算轨迹点处的法向量的函数。
[0123]
然后计算喷涂点和姿态:
[0124][0125]
其中,path
pai
代表喷枪的喷涂位姿集合,代表由自由曲面上的亚多边形轨迹所包含的轨迹点坐标和法向量与喷涂高度计算喷涂位姿集合的函数,h
pai
代表喷涂高度。
[0126]
对喷涂位姿路径进行评估,对生成的喷涂位姿路径进行相关指标计算,得到加权评估指数,据此完成轨迹执行判断:
[0127][0128]
其中,κ代表喷涂位姿路径的评估指数,代表计算评估指数的函数。
[0129]
经过喷涂位姿路径评估的喷涂轨迹进行下发,驱动执行机构进行喷涂任务:
[0130]
ret=issue(path
pai
)
[0131]
其中,ret代表下发指令的返回值,issue计算下发指令的函数。
[0132]
本发明还提供一种自由曲面喷涂路径自动生成装置,包括存储器和处理器,存储器上存储有计算机程序,处理器执行程序时实现上述的方法。
[0133]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1