无人机在高空环境下姿态稳定控制方法与流程
1.本发明涉及无人机技术领域,具体是一种无人机在高空环境下姿态稳定控制方法。
背景技术:
2.在高空环境下,无人机的应用越来越广泛,比如说无人机在高空进行航拍测绘以及无人机对于高层建筑的消防救援。然而高海拔差跨度的情况下,空气密度会发生较大变化,从而影响无人机的气动特性。并且高空环境下存在强风干扰的情况,对无人机实时姿态控制产生较大影响,会导致无人机的姿态突然发生改变。因此,无人机在高空环境下姿态稳定控制问题亟待解决。
技术实现要素:
3.本发明为了解决现有技术的问题,提供了一种无人机在高空环境下姿态稳定控制方法,解决了无人机在高空环境下姿态稳定控制问题,有效避免空气密度变化和强风影响导致飞行姿态发生变化,提高无人机的稳定性。
4.本发明提供了一种无人机在高空环境下姿态稳定控制方法,无人机通过传感器获取外界风速和风向以及自身的飞行三维姿态,将传感器获得的信息传递给飞行控制器,飞行控制器通过算法控制飞行作动器,进而控制无人机的姿态,实现无人机在高空环境下的姿态稳定;所述算法为自适应控制算法和模糊自抗扰控制相结合,利用模糊控制器能在线对非线性状态误差反馈控制律参数进行实时调节,解决了自抗扰控制器中参数缺乏在线自整定的问题。再利用自适应控制器对无人机的姿态进行跟踪估计,并利用估计值来修正自抗扰的补偿系数,提升系统控制精度和抗扰动性。
5.无人机在高空情况下受到强风干扰的不确定性会导致自抗扰控制中的扰动补偿系数出现较大偏差难以精准补偿,为此设计自适应控制器使得理想飞行姿态和实际飞行姿态之间的误差趋近于零,再求得准确补偿系数,从而提高扰动补偿精度;
6.跟踪微分器表达形式如下:
[0007][0008]
其中,表示姿态信号的跟踪输出值;表示微分信号;r为系统稳定收敛速度;h为积分步长;
[0009]
扩张观测器表达式如下:
[0010][0011]
其中β为观测器的调节因子;α决定了函数的非线性程度;δ决定了函数的线性区域范围。
[0012]
传感器采集数据时,通过收集无人机面对强风干扰下的作动数据并整理成数据集,使用数据集训练卷积神经网络,通过训练的卷积神经网络能够实现无人机在高空环境下的姿态稳定。
[0013]
所述传感器包括用于测量风速的风速传感器、用于测量风向的风向传感器、用于测量无人机与地面倾角的倾角传感器和用于测量无人机在飞行三维姿态的姿态传感器,姿态传感器输入端与风速传感器、倾角传感器和风向传感器连接,输出端与飞行控制器相连接。飞行作动器调节旋翼的转速以及调节无人机的三维飞行姿态。
[0014]
本发明有益效果在于:
[0015]
1、解决无人机在高空环境下姿态稳定控制问题,有效避免空气密度变化和强风影响导致飞行姿态发生变化,提高无人机的稳定性。
[0016]
2、通过训练的卷积神经网络能够提高无人机在高空环境下的姿态稳定。
附图说明
[0017]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
[0018]
图1为本发明的无人机姿态控制原理框图;
[0019]
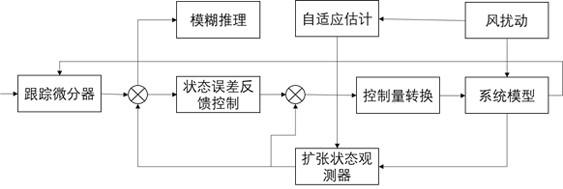
图2为本发明的飞行控制器控制系统结构框图。
具体实施方式
[0020]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0021]
下面结合附图对本发明的技术方案做进一步的详细说明:
[0022]
图1为本发明的无人机姿态控制原理框图;图2为本发明的飞行控制器系统结构框图。
[0023]
在一种具体实施方式中,提供了一种无人机在高空环境下姿态稳定控制方法,包括:
[0024]
用于测量风速的风速传感器;
[0025]
用于测量风向的风向传感器;
[0026]
用于测量无人机与地面倾角的倾角传感器;
[0027]
整合以上传感器信息,测量无人机飞行三维姿态的姿态传感器;
[0028]
依靠传感器采集信息并通过控制执行器维持姿态稳定的飞行控制器;
[0029]
用于调节旋翼转速以及调节无人机三维飞行姿态的飞行作动器;
[0030]
其中无人机在高空环境进行工作时,由风速传感器、风向传感器和倾角传感器的信息综合得到无人机受到的风力大小、风向以及无人机受到的影响;由飞行控制器对这些信息通过自适应模糊自抗扰算法进行处理;飞行控制器控制飞行作动器改变无人机旋翼的转速以及无人机的飞行姿态。如图1所示。
[0031]
飞行控制器的算法采用自适应模糊自抗扰控制方法,利用模糊控制器能在线对非线性状态误差反馈控制律参数进行实时调节,解决了自抗扰控制器中参数缺乏在线自整定的问题。再利用自适应控制器对无人机的姿态进行跟踪估计,并利用估计值来修正自抗扰的补偿系数,提升系统控制精度和抗扰动性;
[0032]
无人机在高空情况下受到强风干扰的不确定性会导致自抗扰控制中的扰动补偿系数出现较大偏差难以精准补偿,为此设计自适应控制器使得理想飞行姿态和实际飞行姿态之间的误差趋近于零,再求得准确补偿系数,从而提高扰动补偿精度;
[0033]
跟踪微分器表达形式如下:
[0034][0035]
其中,表示姿态信号的跟踪输出值;表示微分信号;r为系统稳定收敛速度;h为积分步长;
[0036]
扩张观测器表达式如下:
[0037][0038]
其中β为观测器的调节因子;α决定了函数的非线性程度;δ决定了函数的线性区域范围。
[0039]
通过收集无人机面对强风干扰下的作动数据并整理成数据集,使用数据集训练卷积神经网络,通过训练的卷积神经网络能够实现无人机在高空环境下的姿态稳定。
[0040]
本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于设备实施例而言,以上所述仅是本发明的优选实施方式,由于其基本相似于方法实施例,所以描述得比较简单,相关之处参见方法实施例的部分说明即可。以上所述,仅为本发明的具体实施
方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,对于本技术领域的普通技术人员来说,可轻易想到的变化或替换,在不脱离本发明原理的前提下,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1