一种基于梯度下降的制导参数在线修正方法及系统与流程
1.本发明属于航天制导与控制领域,涉及一种基于梯度下降的制导参数在线修正方法及系统。
背景技术:
2.在飞行过程中,若飞行器的目标点发生了变化,通常采用在线开环生成制导指令并采用pd控制进行跟踪制导实现修正飞行器的飞行轨迹的效果,该方法虽能完成变更目标后的在线控制,但在执行中遇到大气、气动等不确定性时,其制导指令执行效果差,无法准确实现在线生成的飞行轨迹,精度无法保证,同时当轨迹变化较大时,跟踪制导的pd参数可能无法适应新轨迹的跟踪任务,可能导致跟踪效果发散,飞行任务失败。
技术实现要素:
3.本发明解决的技术问题是:克服现有技术的不足,提出一种基于梯度下降的制导参数在线修正方法及系统,能够在线准确生成飞行轨迹,保证落点精度满足要求。
4.本发明解决技术的方案是:一种基于梯度下降的制导参数在线修正方法,包括:根据飞行器当前状态与目标状态,利用在线轨迹方法得到后续的飞行轨迹与当前的制导指令;确定制导指令在线修正的最优指标,所述最优指标为按当前的制导指令执行若干制导周期后,得到的实际轨迹与在线轨迹方法得到的后续飞行轨迹最接近;利用梯度下降法对在线轨迹规划输出的制导指令进行修正,得到修正量;利用修正量确定制导程序角指令,完成制导参数的在线修正。
5.优选的,所述最优指标满足如下公式:其中,为利用当前的制导指令,在已知环境与本体模型下由数值积分获得的当前周期结束时的速度和高度;为在实际环境与本体模型下得到的当前周期结束时的速度和高度,由导航信息获得;分别为终端速度和终端高度;为第一权重系数,为第二权重系数。
6.优选的,第一权重系数取0.7,第二权重系数取0.3。
7.优选的,利用如下公式获得第n个制导周期的修正量:其中,分别为当前时刻飞行器的速度和质量,为当前时刻的俯仰角,为大气密度,为气动特征面积,为气动力,为攻角,为第n-1个制导周期的执
行误差,为制导周期。
8.优选的,,,为利用当前的制导指令,在已知环境与本体模型下由数值积分获得的第n-1个制导周期结束时的速度和高度;,为在实际环境与本体模型下得到的第n-1个制导周期结束时的速度和高度。
9.优选的,。
10.优选的,制导程序角指令满足如下公式:其中为系数,,。
11.优选的,按下面方法获得:对和进行在线探索,在每次探索中根据执行效果对及进行惩罚和奖励,惩罚过程为:如果当前次探索周期的制导指令导致飞行轨迹跟踪偏差增大,则令,;奖励过程为:如果当前次探索周期的制导指令导致飞行轨迹跟踪偏差减小,则令,,其中,为第次探索周期时系数的取值,为第次探索周期时系数的取值,为第次探索周期时系数的取值,为第次探索周期时系数的取值,为第次探索周期时系数的取值,为第次探索周期时系数的取值;每一个轨迹规划周期探索n次,n10,得到最优系数。
12.优选的,在飞行器飞行过程中的每一个轨迹规划周期,均执行所述的制导参数在线修正方法。
13.优选的,轨迹规划周期大于2s。
14.一种基于梯度下降的制导参数在线修正系统,包括制导指令实时生成模块、制导指令修正模块以及制导参数修正模块;制导指令实时生成模块:根据飞行器当前状态与目标状态,利用在线轨迹方法得到后续的飞行轨迹与当前的制导指令,输出给制导指令修正模块;制导指令修正模块:确定制导指令在线修正的最优指标,所述最优指标为按当前的制导指令执行若干制导周期后,得到的实际轨迹与在线轨迹方法得到的后续飞行轨迹最接近;利用梯度下降法对在线轨迹规划输出的制导指令进行修正,得到修正量,输出给制导参数修正模块;制导参数修正模块:利用修正量确定制导程序角指令,完成制导参数的在线修正。
15.本发明与现有技术相比的有益效果是:(1)本发明针对在线轨迹规划得到的制导指令为开环制导问题,提出了基于在线探索与梯度信息的在线制导指令修正方法,在线将环境与本体参数的不确定性反馈到制导
系统,能够主动适应不确定性参数,增强制导方法的适应性,保证落点精度满足要求。
16.(2)本发明方法不需要采用pd跟踪的方式进行轨迹跟踪制导,通过在线探索方式,修正制导指令,避免了离线设计的pd跟踪参数对在线变更轨迹跟踪能力差的缺点。
附图说明
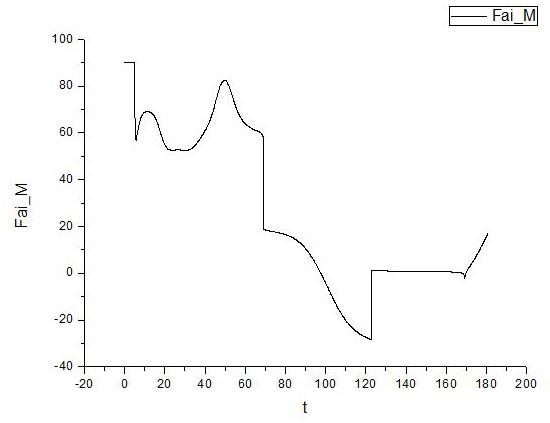
17.图1为制导指令在线修正原理图;图2为气动拉偏下的轴向速度vx变化曲线;图3为气动拉偏下的速度倾角theat_d变化图;图4为气动拉偏下的俯仰角fai_m曲线。
具体实施方式
18.下面结合附图对本发明作进一步阐述。
19.本发明通过在线对制导律的执行效果进行评估与反馈,从而将环境与本体参数不确定性对制导系统的影响反馈进入制导系统,增强制导方法的适应性。
20.如图1所示,本发明一种基于梯度下降的制导参数在线修正方法,在每个轨迹规划周期(大于2s)内执行如下步骤:(1)根据当前状态与目标状态,得到后续的飞行轨迹与当前的制导指令在飞行过程中,若飞行器的目标点发生了变化,需先根据当前状态(如当前高度及当前速度)与目标状态(如目标高度及目标速度),利用在线轨迹方法得到后续的飞行轨迹与当前的制导指令。
21.(2)确定制导指令在线修正的评价指标由于利用在线轨迹方法得到的制导指令,这一过程是一个开环制导过程,需要对得到的制导指令进行实时修正,形成闭环制导,以应对飞行过程中的不确定性。
22.执行当前的制导指令,经过10个制导周期后,得到高度及、速度及等状态量,实现实际轨迹与在线规划得到的轨迹的对比。在线修正与梯度信息的最优指标为制导指令的实际轨迹与在线轨迹得到的轨迹最接近,即有
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中,为利用当前的制导指令,在已知环境与本体模型下由数值积分获得的当前周期结束时的速度和高度;为在实际环境与本体模型下得到的当前周期结束时的速度和高度,由导航信息获得;分别为目标速度和目标高度;第一权重系数取0.7,第二权重系数取0.3。
23.(3)利用梯度下降思想进行制导指令的修正利用梯度下降思想对在线轨迹规划输出的俯仰角进行修正,修正规则为:(2)其中,分别为当前时刻的速度大小和质量,为当前时刻的俯仰角,为大气
密度,为气动特征面积,为气动力,为攻角,为第n-1个制导周期的执行误差(),为执行周期。利用公式(2)可对在线规划得到的制导指令进行修正,得到新的制导指令。
24.(4)制导指令在线修正策略利用在线探索的思想,设计制导程序角指令的探索公式为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)其中系数在范围内随机给出,系数在范围内随机给出。
25.在每个轨迹规划周期内,对式3)中系数及系数进行在线探索,探索次数为n次,(n10),在每次探索内,需根据执行效果对制导程序角指令的系数及系数进行惩罚和奖励,惩罚过程为:如果当前次探索周期的制导指令导致轨迹跟踪偏差增大,则令,;奖励过程为:如果当前探索的制导指令导致轨迹跟踪偏差减小,则令,,其中,分别代表第次的值,分别代表第次的值。
26.共执行和探索n次,可得到最优系数及系数,继而得到修正后的程序俯仰角并作为当前轨迹规划周期内的制导指令修正公式,在下一个轨迹规划周期再次进行上述操作。
27.本发明还涉及一种计算机可读存储介质,存储有计算机指令,当计算机指令在计算机上运行时,使得计算机执行上述方法。
28.为了验证本发明提出方法对不确定性的适应能力,设置了气动系数拉偏“法向力系数偏差+15%、轴向力系数偏差+20%”下的测试仿真。
29.选定终端状态要求:高度120km,速度7200m/s,速度倾角0.5
°
。在该任务要求下,采用现有的在线轨迹规划方法实时生成满足过程约束的飞行轨迹和制导指令,通过在线探索与梯度下降方法,对制导指令进行在线修正,最终满足终端任务要求。
30.表 1 气动拉偏飞行仿真数据终端精度
△
高度(m)
△
速度(m/s)
△
速度倾角(deg)数值-58.1-1.4-0.05图2-图4为飞行器气动拉偏下的状态量曲线和角度曲线。从仿真结果可知,本发明提出的方法,在气动拉偏条件下,终端高度、速度与速度倾角均达到了较高的精度。
31.在本实施例的仿真中,制导指令更新周期为5ms,轨迹规划时间小于1s,满足在线规划与制导对实时性的要求。
32.本发明提出了一种可自适应修正制导指令的方法。通过在线轨迹规划技术,可在线根据飞行器当前位置和目标约束,生成飞行轨迹与制导程序角指令,然后执行当前周期的制导指令,并对制导指令进行放大、缩小等探索,评估不同制导指令的执行效果与规划得到的飞行轨迹的符合程度,并利用符合程度信息,根据速度、高度对制导指令的梯度信息,
对制导指令进行在线修正。这种方式可使飞行器在受到本体和环境不确定影响下,实时对在线规划得到的制导程序角进行修正,从而获得最佳制导程序角,实现飞行器对不确定性的适应性提升,保证落点精度满足要求。
33.本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1