新型串列式巡检机器人系统的制作方法
本发明涉及轨道巡检,具体涉及新型串列式巡检机器人系统。
背景技术:
1、对例如管廊、煤矿等长距离或复杂场地的巡检工作是场地安全的基础和重要保障。由于监测项目多、线路长等原因,特别是超长管廊的环境条件恶劣、封闭性强、构造物多、通讯不便,使得以人工方式对场地状态的巡检难度大,可行性极为有限,并且也难以有效保障巡检人员的人身安全。
2、由于机器人的具有感知、决策、执行等基本特征,因此可以辅助甚至替代人类完成巡检这一危险、繁重、复杂的工作,提高工作效率与质量。
3、巡检机器人工作时,通常以轨道平台为载体沿着固定的运行路径在轨道上运动,并对需要巡检的环境进行监测。随着技术进步及需求增加,许多地方也开始陆续采用轨道巡检机器人,例如工厂、饲养厂、智能农场、市政管廊、煤矿井下等等等。
4、现有固定轨道巡检的巡检机器人系统的传动设计中,一般是通过在固定位置设置驱动装置如电机和相关传动机构如带轮,来驱动轨道上布置的传送带或传送线及其上安装的巡检机器人一起循着轨道移动,以进行巡检。
5、现有的巡检机器人系统中,巡检机器人装置一般作为一个整体在轨道上运行进行巡检。由于巡检机器人装置可能需要在某些恶劣工况下工作,例如在矿山、井下、多易燃粉尘场合等等对防爆有严格标准的场所。因此,在这类环境中,巡检机器人的设计应满足防爆要求,尽可能减少工作时的温度过高问题,改善散热。有些应用场合由于空间狭小,需要巡检机器人的体积尽可能小。传送带或传送线以及轨道的局限性也需要巡检机器人尽可能轻量,并防止局部过载,上述以及其它应用环境对可靠性也提出了更高的要求。
6、业内持续需要改进的巡检机器人系统,以持续改善巡检机器人系统性能表现,并尽可能减轻或者甚至消除上述技术缺陷,以及实现其它更多的技术优势。
7、本发明说明书的此背景技术部分中所包括的信息,包括本文中所引用的任何参考文献及其任何描述或讨论,仅出于技术参考的目的而被包括在内,并且不被认为是将限制本发明范围的主题。
技术实现思路
1、鉴于以上所述以及其他更多的构思而提出了本发明。
2、本发明的基本构思之一在于,提供一种新型串列式巡检机器人系统,它具有新颖的驱动设计。根据该驱动设计,在轨道上循着其轨迹安装布置传动链,驱动电机、减速机构和传动链轮可通过例如安装支架组装在一起,巡检机器人可与之相连或者组装在一起,通过传动链轮在传动链上的啮合滚动,而带动它们在轨道上运行。安装支架、例如安装座上可安装引导/限位导轮。这种驱动设计的全部或者部分传动链,例如安装在弯曲轨道分段中的传动链,优选采用可侧弯/具有三维延伸自由度的传动链。这种传动链-链轮的布置,相比于传统滑轮滑轨设计,齿轮齿条的传动设计,具有很大的优越性。滑轮滑轨的运行过程和轨迹不稳定,且基本上不能负载运行;齿轮齿条传动的运动,基本上不太可能实现二维和三维运动自由度,更无法实现某些情形下从直立运行轨迹到弯曲/扭转轨迹到水平周向运行轨迹的运动。优选为蜗轮蜗杆的减速机构不仅节省了安装空间,而且天然可以自锁,这对于驱动装置和巡检机器人在需要时在轨道上的位置固定和保持是非常重要和有优势的。
3、本发明的另外一个基本构思在于,提供一种新颖的轨道设计,具有顶面导槽、外侧导槽和底面导槽,并且还可选择性地设置各类安装槽,如链条安装槽,拼接槽,等等,以及可选择的各类开槽和槽孔。安装座上安装有在轨道的相应导槽内运行的上导轮、侧导轮和下导轮,使得巡检机器人可在轨道上可靠平顺地运行。
4、本发明的另外一个基本构思在于,提供一种新型的电缆牵引设计。根据该牵引设计,在轨道上循着其轨迹安装布置多个牵引小车,电缆被固定在牵引小车上随之一起由驱动装置带动,通过这种方式,可以非常方便地给驱动装置和/或巡检机器人来供电,同时也使得电缆可以方便平顺地跟随驱动装置随动,方便了电缆的安装和运行,并保证了供电的可靠性和电缆寿命。这与例如现有技术的滑触线供电方式相比提供了优势。
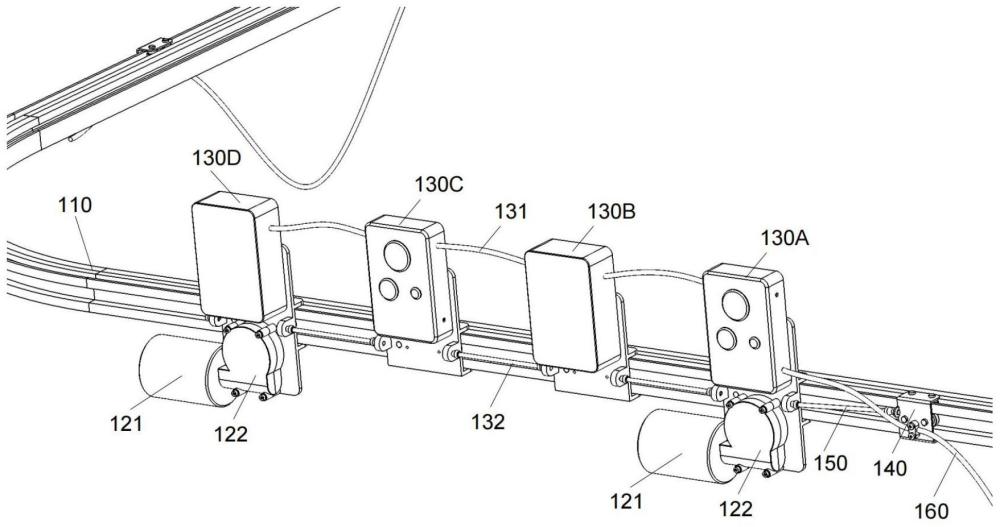
5、串列式巡检机器人可设置多个串列的机器人模块,使得机器人模块的小体积设计和防爆设计成为可能,因为每个模块只需要一个相对小容量的电池以满足防爆标准,并且这样的设计还提供改善的维护/更换的便利性以及高的可靠性。
6、更具体而言,根据本发明的一方面的构思,公开了一种新型串列式巡检机器人系统,包括:轨道,所述轨道限定了巡检机器人的巡检路径;传送链,所述传送链固定安装在所述轨道上而循着所述轨道的轨迹延伸;驱动装置,所述驱动装置包括电机、安装座、借助于所述安装座与所述电机固定组装在一起的减速机构和传动链轮,所述传动链轮经由所述减速机构可旋转地连接在所述电机的转轴上而被所述电机驱动旋转,其中,所述传动链轮与所述传动链条啮合;串列式巡检机器人,所述串列式巡检机器人与所述驱动装置连接在一起,从而被所述驱动装置驱动而循着所述轨道的轨迹行进;其中,所述串列式巡检机器人包括彼此相连而可被所述驱动装置驱动行进的一组机器人模块,所述一组机器人模块以彼此间隔开地串列在一起的方式分布在所述轨道上。
7、根据一实施例,所述串列式巡检机器人中的至少一个机器人模块固定装配在所述安装座上。
8、根据一实施例,所述轨道是是环形轨道,所述环形轨道限定了巡检机器人的环形的固定巡检路径。
9、根据一实施例,所述串列式巡检机器人是电池供电的串列式巡检机器人,其中,所述驱动装置自带电池或者由单独的电池模块供电;所述一组机器人模块中还包含下列由电池供电的功能模块中的至少一者:照明模块、视频-热成像-音频模块、气体传感器模块、对讲模块、地面无线传感器数据收集模块、消防模块和视频-热成像镜头清洁模块。
10、根据一实施例,所述串列式巡检机器人是电缆供电的串列式巡检机器人,其中,所述一组机器人模块中包含下列功能模块中的至少一者:照明模块、视频-热成像-音频模块、气体传感器模块、对讲模块、地面无线传感器数据收集模块、消防模块和视频- 热成像镜头清洁模块。
11、根据一实施例,所述新型串列式巡检机器人系统进一步包括电缆牵引组件,所述电缆牵引组件包括:多个牵引小车,每个所述牵引小车都安装在所述轨道内且循着所述轨道的纵长延伸轨迹运行;电缆,所述电缆一端电连接至所述驱动装置,另一端电连接至所述供电电源。
12、根据一实施例,所述电缆被固定或者被夹持在所述牵引小车上,从而使得所述电缆能够随着所述牵引小车的移动而移动。
13、根据一实施例,所述牵引小车包括支架,和安装在所述支架上、且构造成在所述轨道的相应导槽内运行的一对上导轮、一对侧导轮和一对下导轮。
14、根据一实施例,所述支架具有上平板、侧板和下平板,分别用于安装所述一对上导轮、一对侧导轮和一对下导轮。
15、根据一实施例,所述支架由槽钢、槽铝型材、工字钢或者工字铝型材加工而成。
16、根据一实施例,所述轨道上设有顶面导槽、外侧导槽和底面导槽。
17、根据一实施例,所述传动链的全部或一部分是可侧弯的具有三维延伸自由度的链传动链条。
18、根据一实施例,所述传动链是可负重的齿形链或滚子链。
19、根据一实施例,所述传动链是一整条不间断的可具有空间延伸自由度的链条。这种整条链条的优势在于使得驱动装置运行过程不易打滑,爬坡能力强,并且定位更精确。
20、根据一实施例,所述安装座上安装有构造成在所述轨道的相应导槽内运行的一对上导轮、一对侧导轮和一对下导轮。
21、根据一实施例,所述安装座具有上横板、直板和下横板,分别用于安装所述一对上导轮、一对侧导轮和一对下导轮。
22、根据一实施例,所述串列式巡检机器人中的至少一个机器人模块固定安装在所述安装座上。
23、根据一实施例,所述减速机构是啮合配合的蜗轮和蜗杆,其中,所述蜗杆与所述电机的转轴传动配合,并且所述蜗轮与所述传动链轮传动配合。
24、根据一实施例,所述蜗轮固定在所述安装座的一侧,所述传动链轮与所述蜗轮同轴地可旋转地安装在所述安装座的相反的另一侧。
25、根据一实施例,所述轨道的底面还设有传动链安装槽,其中安装所述传动链。
26、根据一实施例,所述传动链轮处于所述轨道的下方,并能够与固定安装在所述轨道底面的传动链啮合。
27、根据一实施例,在所述轨道的至少部分轨道分段上设有用于安装拼接销的拼接槽。
28、根据一实施例,所述轨道是整体成型的金属件。
29、根据一实施例,所述轨道是整体成型的金属件。
30、根据一实施例,所述机器人模块是能够独立维修和/或独立更换的。
31、根据一实施例,所述一组机器人模块包括下列功能模块中的至少一者:照明模块、视频-热成像-音频模块、气体传感器模块、对讲模块、无线通讯模块、消防模块、摄像头清洁模块。
32、根据一实施例,所述功能模块内置有电池。
33、根据一实施例,所述功能模块从所述电缆取电。
34、根据本发明的另外一方面的构思,还提供了一种用于巡检机器人系统的电缆牵引组件,包括:牵引小车,所述牵引小车上安装至少两个上导轮、至少两个侧导轮和至少两个下导轮,其中所述上导轮、所述侧导轮和所述下导轮配合在所述巡检机器人系统的轨道上以带动所述牵引小车运行;电缆,所述电缆固定在所述牵引小车上,由此能够在受拉时借助于所述牵引小车在所述轨道上的滚动而一起移动。
35、根据一实施例,所述牵引小车包括支架,和安装在所述支架上且构造成在所述轨道的相应导槽内滚动运行的一对上导轮、一对侧导轮和一对下导轮。
36、根据一实施例,所述支架具有上平板、侧板和下平板,分别用于安装所述一对上导轮、一对侧导轮和一对下导轮。
37、根据一实施例,所述支架由槽钢、槽铝型材、工字钢或者工字铝型材加工而成。
38、根据一实施例,所述轨道上设有顶面导槽、外侧导槽和底面导槽,所述一对上导轮、一对侧导轮和一对下导轮分别配合在所述顶面导槽、外侧导槽和底面导槽中运行。
39、根据一实施例,所述支架上设有电缆安装件。
40、根据一实施例,所述电缆安装件包括带卡槽的主体,以及用于将所述电缆紧固在所述卡槽内的紧固螺钉。
41、根据一实施例,所述牵引小车的支架由槽钢、槽铝型材、工字钢或者工字铝型材加工而成。
42、根据一实施例,所述巡检机器人系统是串列式巡检机器人系统。
43、本发明还公开了巡检机器人系统在室外环境、矿井井下、码头运输场所、工业生产线、长距离轨道输送场合、长距离带式输送场合、防爆场合、防冻场合、防雨水场合或防尘场合中进行巡检的用途。
44、本发明的更多实施例还能够实现其他未一一列出的有利技术效果,这些其他的技术效果在下文中可能有部分描述,并且对于本领域的技术人员而言在阅读了本发明后是可以预期和理解的。
- 还没有人留言评论。精彩留言会获得点赞!