基于量子绸鱼优化机制的机船协同任务分配方法
本发明涉及一种基于量子绸鱼优化机制的机船协同任务分配方法,属于无人机与无人船协同控制领域。
背景技术:
1、机船协同是将可移动性控制平台作为无人机与无人船的升降和后勤平台,将搭载无人机与无人船作为可移动性控制平台的辅助侦察、打击、追踪或评估手段,在保证无人机与无人船的作业和生存能力的同时,通过三种平台的高度协作以实现机船协同作业效能的最大化。在某片海域及相应空域内存有若干目标,平台搭载多架无人机与无人船从起始位置航行,当其航行至既定航标处暂缓航行,多架搭载无人机升空协同对空域目标执行既定任务,多艘无人船下海协同对海域目标执行既定任务,当所有搭载无人机与无人船返航后,平台向下一既定航标处航行,直至到达目的位置。机船协同包含多机协同和多船协同,仍需考虑任务时间、任务时序、机船性能、航路可行和多机/多船协同五项基本约束。
2、近年来,已有学者对机船协同任务分配方法进行了一定的研究。马华伟等(马华伟,朱益民,胡笑旋.基于粒子群算法的无人机舰机协同任务规划[j].系统工程与电子技术,2016,38(07):1583-1588.)以多机协同为研究背景,构建多机协同任务分配模型及相应代价函数,最后使用自适应粒子群算法求解各既定航标处的多机协同任务分配方案,值得注意的是,该模型中的全部既定航标需预先设定,而非智能获取。鹿丰玲(鲁丰玲.基于蚁群算法的无人机舰机协同任务规划[j].舰船科学技术,2019,41(18):67-69.)同样以多机协同为研究背景,主要解决搭载无人机返航过程中的路径寻优问题。王树朋等(王树朋,徐旺,刘湘德,邓小龙.基于自适应遗传算法的多无人机协同任务分配[j].电子信息对抗技术,2021,36(01):59-64.)使用自适应遗传算法求解多无人机协同任务分配方案。周菁(周菁.多无人船协同海战中的目标分配算法研究[j].现代导航,2021,12(03):210-212.)使用经典匈牙利算法求解多无人船协同打击时的目标分配方案。已有文献的检索结果表明,现与机船协同任务分配相关的研究成果相对较少,而与多无人机或多无人船协同任务分配相关的研究成果相对较多。此外,现有的多机协同和多船协同方法中所使用的群智能优化算法仍然存在着收敛速度慢、收敛精度差和易于陷入局部极值等问题。
技术实现思路
1、针对现有方法的缺点和不足,本发明设计了一种基于量子绸鱼优化机制的机船协同任务分配方法。以某片海域及相应空域内全部目标的地理位置为先验知识,使用模糊c均值聚类方法来智能获取平台各既定航标。平台搭载多架无人机和无人船向既定航标航行,在既定航标处暂缓航行,考虑多种约束条件并基于量子绸鱼优化机制,多架搭载无人机升空协同对若干空域目标执行既定任务后归航,多艘无人船下海协同对若干海域目标执行既定任务后归航,平台向下一既定航标航行直至到达目的地。
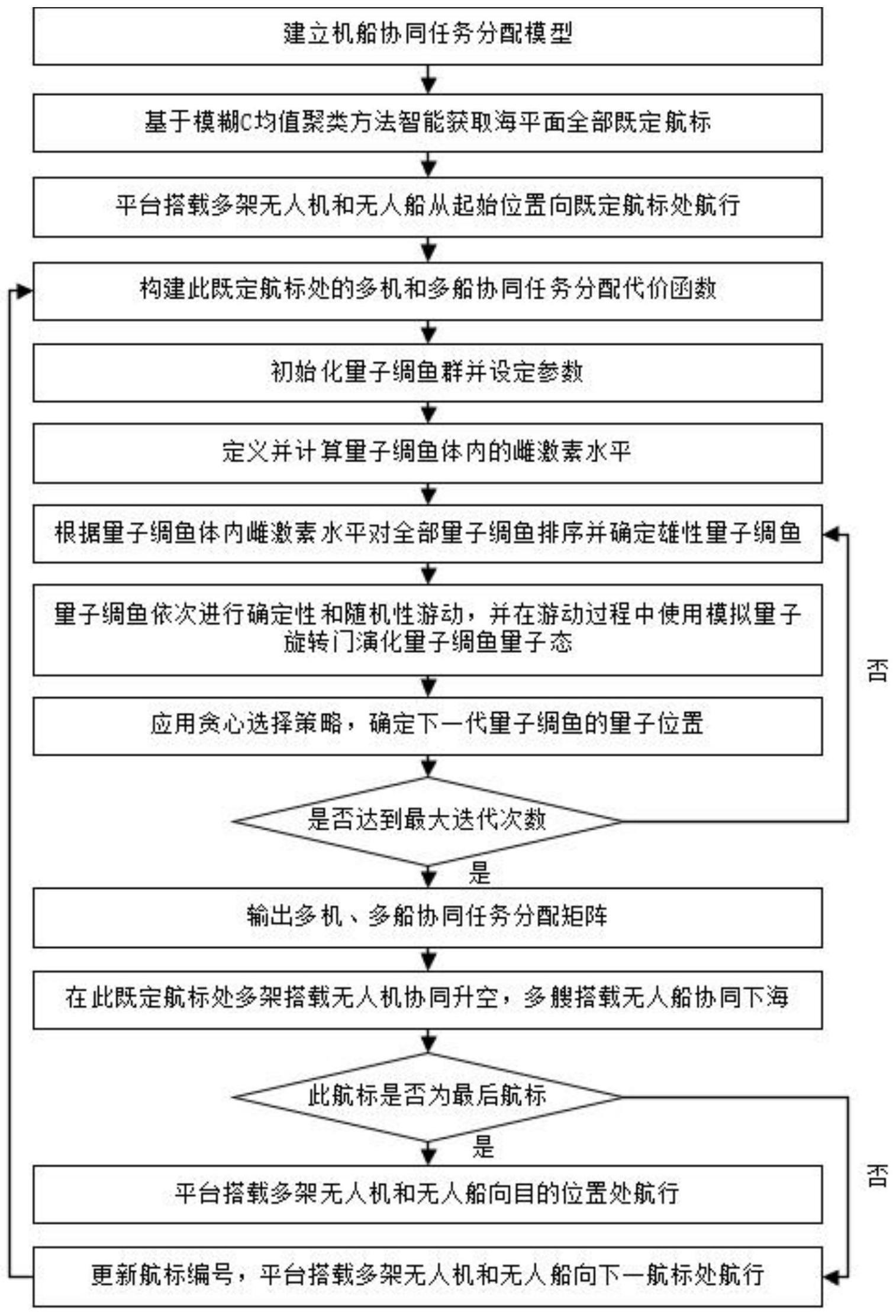
2、本发明的目的是这样实现的:步骤一:建立机船协同任务分配模型。
3、设定平台的属性集合其中,为平台起始位置,为平台目的位置,且满足即平台始终保持在海平面上航行,nuav和nuuv分别为搭载无人机和无人船数量,muav和muuv分别为空域和海域目标数量,kuav和kuuv分别为空域和海域任务数量。设定搭载无人机n′的属性集合其中,为搭载无人机n′的航行速度,为搭载无人机n′的任务载荷,n′=1,2,...,nuav;设定搭载无人船的属性集合其中,为搭载无人船的航行速度,为搭载无人船的任务载荷,设定空域目标m′的属性集合其中,为空域目标m′的地理位置,且满足m′=1,2,...,muav;设定海域目标的属性集合其中,为海域目标的地理位置,且满足设定空域任务k′的属性集合其中,为空域任务k′被搭载无人机执行所需固定时间,由搭载无人机性能硬性决定,为空域任务时间间隔限制,k′=1,2,...,kuav;设定海域任务的属性集合其中,为海域任务被搭载无人船执行所需固定时间,由搭载无人船性能硬性决定,为海域任务时间间隔限制,
4、步骤二:基于模糊c均值聚类方法智能获取海平面全部既定航标。
5、(1)根据空域和海域目标数量确定航标数量其中,λbea为航标密度因子,round(·)为数值取整函数,mcon=muav+muuv为目标总数。
6、(2)初始化模糊c均值聚类方法并设定参数。设定最大迭代次数为p,迭代次数标号为整数p,迭代收敛因子为λfcm。第p次迭代时,聚类中心φ的位置目标对聚类中心φ的隶属度且满足隶属约束φ=1,2,...,mbea,p=1,2,...,p。初次迭代时p=1,各聚类中心初始位置在作业区域内随机生成,各初始隶属度在隶属约束下随机生成。
7、(3)定义并计算模糊c均值聚类方法目标函数。目标函数可以表示为υ∈[1,+∞),其中,υ为模糊因子,为第p次迭代时目标与聚类中心φ的欧式距离。需注意,在计算某空域或海域目标与聚类中心的欧式距离时,所使用的是目标向海平面投影后的位置。
8、(4)更新隶属度。定义目标对聚类中心φ的隶属度更新公式为
9、
10、(5)更新聚类中心。定义聚类中心φ的位置更新公式为
11、
12、(6)迭代终止判断。判断是否达到最大迭代次数p或满足若未达到或未满足,则令p=p+1,返回第(4)步;否则,输出各聚类中心位置。
13、(7)获取海平面全部既定航标。首先,用数值0填充各聚类中心位置的第3维度以构成海平面航标位置;其次,按位置第1维度升序排序和第2维度升序排序两种方式编排航标编号,并计算两种编排方式下平台从起始位置到目的位置的总航程;最后,按总航程最小原则确定航标编排方式,定义航标τ的位置
14、(8)将各空域目标和海域目标按距离最近归属为各航标处的空域目标及海域目标,定义航标τ处空域目标m′τ的位置为海域目标的位置为τ=1,2,...,mbea,m′τ和分别为航标τ处空域和海域目标数量。
15、步骤三:平台搭载多架无人机和无人船从起始位置向既定航标处航行。
16、初始化航标编号τ=1,平台搭载nuav架无人机和nuuv艘无人船从起始位置向此既定航标位置航行。
17、步骤四:构建此既定航标处的多机和多船协同任务分配代价函数。
18、定义既定航标τ处的多机协同任务分配代价函数定义既定航标τ处的多船协同任务分配代价函数其中,为航标τ处多机协同任务分配矩阵,为航标τ处多船协同任务分配矩阵,为整数域,和分别为多机和多船协同任务分配矩阵的第k′和第列矩阵,和分别为航标τ处搭载无人机n′和搭载无人船的作业时间,和分别为航标τ处空域任务k′和海域任务在空域目标m′τ和海域目标处的执行时间,λt和λc分别为任务时间和任务载荷约束惩罚因子。为数值修正函数,数值非负时不修正,数值为负时修正为0;γn′(·)和为矩阵元素个数提取函数,且分别满足元素值为n′和根据多机或多船协同任务分配矩阵和各搭载无人机或无人船的属性可确定搭载无人机或无人船的作业时间,具体步骤如下。为简略表示,只给出多机协同的情况,多船协同同理可得。
19、(1)规定空域任务按照编号由1到kuav的顺序依次被搭载无人机协同执行,初始时k′=1;初始化航标τ处搭载无人机n′的初位置标识末位置标识航行时间滞留时间执行空域任务时间作业时间初始化航标τ处空域目标m′τ的受制时间初始化航标τ处空域任务k′在空域目标m′τ处的执行时间
20、(2)规定搭载无人机按照编号由1到nuav的顺序依次执行当前空域任务k′,初始时n′=1。
21、(3)判断是否满足n′≤nuav。若满足,则继续执行;否则,则转至第(7)步。
22、(4)判断该搭载无人机n′是否需要执行当前空域任务k′,即判断是否满足若满足,则初始化该搭载无人机n′对于当前空域任务k′的执行次数继续执行;否则,更新搭载无人机编号,令n′=n′+1,返回第(3)步。
23、(5)令该搭载无人机n′的末位置标识令该搭载无人机n′的航行更新时间令该搭载无人机n′的滞留更新时间令该搭载无人机n′的执行空域任务更新时间令该搭载无人机n′的作业更新时间令该搭载无人机n′的初位置标识令该搭载无人机n′的相应空域目标受制时间令当前空域任务k′在相应空域目标处的执行时间其中,为矩阵元素行值提取函数,且满足元素值为n′,元素按行第次出现;d(·)为矢量间欧式距离。
24、(6)判断该搭载无人机n′是否执行完当前全部空域任务,即判断是否满足若满足,则更新搭载无人机编号,令n′=n′+1,返回第(3)步;否则,更新该搭载无人机n′对于当前空域任务k′的执行次数,令返回第(5)步。
25、(7)全部搭载无人机返航判断,即判断是否满足k′=kuav。若满足,则全部搭载无人机返航,令搭载无人机n′的航行更新时间令搭载无人机n′的作业更新时间n′=1,2,...,nuav;否则,更新空域任务编号,令k′=k′+1,返回第(2)步。
26、步骤五:初始化量子绸鱼群并设定参数。
27、设定量子绸鱼群规模为h,绸鱼群可分为单条雄性和多条雌性,最大迭代次数迭代次数标号第g次迭代时,第i条量子绸鱼在u维搜索空间中的量子位置其量子位置的第j维量子比特j=1,2,...,u,g=1,2,...,g。应用量子绸鱼优化机制求解航标τ处多机协同任务分配矩阵时令u=m′τkuav,求解多船协同任务分配矩阵时令初代时g=1,初代量子绸鱼量子位置的每一维量子比特均初始化为[0,1]区间内的均匀随机数。
28、步骤六:定义并计算量子绸鱼体内的雌激素水平。
29、第g次迭代时,将全部量子绸鱼量子位置的每一维映射到离散解空间范围内,得到量子绸鱼量子位置的映射态映射方程定义为其中,ceil(·)为数值向上取整函数,为映射度。应用量子绸鱼优化机制求解航标τ处多机协同任务分配矩阵时令并将第i条量子绸鱼量子位置的映射态进行维度变换后代入航标τ处多机协同任务分配代价函数中得到代价值求解多船协同任务分配矩阵时令并将第i条量子绸鱼量子位置的映射态进行维度变换后代入航标τ处多船协同任务分配代价函数中得到代价值其中,上标特指矩阵按m′τ×kuav维重构,上标°特指矩阵按维重构,重构方式为先行后列。规定量子绸鱼量子位置映射态所对应的代价值越低,量子绸鱼在该量子位置处体内雌激素水平就越低。
30、步骤七:根据量子绸鱼体内雌激素水平对全部量子绸鱼排序并确定雄性量子绸鱼。
31、将全部量子绸鱼按照体内雌激素水平由低到高的顺序排列,规定量子绸鱼群中体内雌激素水平最低的量子绸鱼为雄性量子绸鱼,其余为雌性量子绸鱼。雄性量子绸鱼的量子位置
32、步骤八:量子绸鱼依次进行确定性和随机性游动,并在游动过程中使用模拟量子旋转门演化量子绸鱼量子态。
33、(1)确定性移动:定义确定性移动下第i条量子绸鱼第j维量子位置的更新方程为其中,为确定性移动下第i条量子绸鱼的第j维模拟量子旋转角,为[0,1]区间内的均匀随机数,为标准正态随机数,i=1,2,...,h,j=1,2,...,u。第i条量子绸鱼进行确定性游动后所产生的新量子位置
34、(2)随机性移动:定义随机性移动下第i条量子绸鱼第j维量子位置的更新方程为其中,为随机性移动下第i条量子绸鱼的第j维模拟量子旋转角,为[0,1]区间内的均匀随机数,μ1和μ2为随机量子绸鱼标签,i=1,2,...,h,j=1,2,...,u。第i条量子绸鱼进行随机性游动后所产生的新量子位置
35、步骤九:应用贪心选择策略,确定下一代量子绸鱼的量子位置。
36、计算全部量子绸鱼在原量子位置和新产生量子位置处体内雌激素水平。在量子位置集合中贪婪选择雌激素水平较低的量子位置作为下一代量子绸鱼的量子位置
37、步骤十:演进终止判断,输出多机或多船协同任务分配矩阵。
38、判断是否达到最大迭代次数g,若未达到,则令g=g+1,返回步骤七;否则,终止机制演进,将最优一代量子绸鱼群雄性量子绸鱼量子位置映射态进行相应维度变换后作为多机或多船协同任务分配矩阵输出。
39、步骤十一:在此既定航标处多架搭载无人机协同升空,多艘搭载无人船协同下海。
40、平台在航标τ处暂缓航行,基于多机协同任务分配矩阵,至多nuav架搭载无人机升空对航标τ处m′τ个空域目标协同执行kuav项空域任务后返航;基于多船协同任务分配矩阵,至多nuuv艘搭载无人船下海对航标τ处个海域目标协同执行kuuv项海域任务后返航。
41、步骤十二:平台航向目的位置判断。
42、判断是否满足τ=mbea。若不满足,则更新既定航标编号,令τ=τ+1,平台搭载多架无人机和无人船向下一既定航标航行,并返回步骤四;否则,平台从既定航标mbea处向目的位置航行。
43、与现有技术相比,本发明的有益效果是:本发明以机船协同为背景,以某片海域及相应空域内全部目标的地理位置为先验知识,使用模糊c均值聚类方法来智能获取平台各既定航标。平台搭载多架无人机和无人船向既定航标航行,在既定航标处暂缓航行,考虑多种约束条件并基于量子绸鱼优化机制,多架搭载无人机升空协同对若干空域目标执行既定空域任务后返航,多艘无人船下海协同对若干海域目标执行既定海域任务后返航,平台向下一既定航标航行直至到达目的地。本发明所设计的量子绸鱼优化机制,其仿生于绸鱼变性体质及种群“一夫多妻”制,并使用模拟量子旋转门来演化量子绸鱼量子态,收敛速度快,收敛精度高。仿真实验证明了基于量子绸鱼优化机制的机船协同任务分配方法的有效性,可应用于工程实际。
- 还没有人留言评论。精彩留言会获得点赞!