一种基于量子郊狼优化机制的多无人机协同任务分配方法
1.本发明属于多无人机协同控制领域,具体涉及一种基于量子郊狼优化机制的多无人机协同任务分配方法。
背景技术:
2.无人机(unmanned aerial vehicles,uav)是一种由无线电遥控设备或自身程序控制装置操纵的无人驾驶飞行器。集中式无人机编队协同控制系统需能在满足若干约束下为各机分配合理任务目标及有效航行路线,以极致发挥无人机编队协同作业效能。
3.近年来,已有学者对集中式多无人机协同任务分配方法进行了一定的研究。马焱等(马焱,赵捍东,张玮,陈白禹,邵先锋,张晓东,张跃跃.基于自适应烟花算法的多无人机任务分配[j].电光与控制,2018,25(01):37-43.)以无人机编队协同攻击地面目标为背景构建多无人机协同任务分配模型,然后使用改进型自适应烟花算法求解该模型。梁国强等(梁国强,康宇航,邢志川,尹高扬.基于离散粒子群优化的无人机协同多任务分配[j].计算机仿真,2018,35(02):22-28.)以通用cmtap模型为基础,综合考虑任务时间、任务时序、任务耦合、机载性能和多机协同五项约束,构建多机协同任务分配模型及相应评价指标,最后使用粒子矩阵型编码的离散粒子群算法求解该模型。魏成巍等(魏成巍,裴毅,刘东升,王卫平.基于pso的多无人机协同任务目标分配方法[j].计算机与现代化,2015,(11):32-35.)同样验证了基于离散粒子群算法求解多机协同任务分配方法的有效性。田震等(田震,王晓芳.基于多基因遗传算法的异构多无人机协同任务分配[j].飞行力学,2019,37(01):39-44.)以无人机编队协同执行任务为背景,综合考虑任务时间、任务时序弹等约束来构建改进型cmtap模型及相应评价指标,然后使用染色体矩阵型编码的多基因改进型遗传算法求解该模型。已有文献的检索结果表明,现有的集中式多无人机协同任务分配方法很少考虑三维场景和时间同步约束,即无人机编队应同步完成针对所有目标处的某项或若干项任务,这在实际场景下是有所要求的,例如要求无人机编队同时到达、同时侦察、同时攻击或同时评估等。此外,现有的集中式多无人机协同任务分配方法中所使用的群智能优化算法仍然存在着收敛速度慢、收敛精度差和易于陷入局部极值等问题。
技术实现要素:
[0004]
本发明的目的在于提供一种基于量子郊狼优化机制的多无人机协同任务分配方法。
[0005]
本发明的目的通过如下技术方案来实现:
[0006]
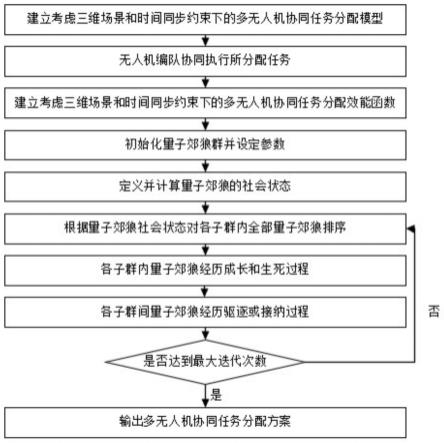
一种基于量子郊狼优化机制的多无人机协同任务分配方法,具体包括以下步骤:
[0007]
步骤一:建立考虑三维场景和时间同步约束下的多无人机协同任务分配模型;
[0008]
步骤二:编队无人机协同执行所分配任务;
[0009]
步骤三:建立考虑三维场景和时间同步约束下的多无人机协同任务分配效能函数;
[0010]
步骤四:初始化量子郊狼群并设定参数;
[0011]
步骤五:定义并计算量子郊狼的社会状态;
[0012]
步骤六:根据量子郊狼社会状态对各子群内全部量子郊狼排序;
[0013]
步骤七:各子群内量子郊狼经历成长和生死过程;
[0014]
步骤八:各子群间量子郊狼经历驱逐或接纳过程;
[0015]
步骤九:演进终止判断,输出多无人机协同任务分配方案。
[0016]
进一步地,步骤一具体如下:
[0017]
设定任务分配矩阵其中,矩阵元素q
m,k
表示分配无人机q
m,k
到目标m处执行任务k,为整数域,n为编队无人机数,m为目标数,k为任务数;设定无人机n的属性集合其中,为无人机n的起飞机库位置,为无人机n的降落机库位置,vn为无人机n的航行速度,cn为无人机n的任务载荷;设定目标m的属性集合其中,为目标m的位置;设定任务k的属性集合其中,为任务k被执行所需固定时间,其由无人机性能硬性决定,为任务k在目标m处执行时间,为任务k在目标m处被无人机n成功执行概率。
[0018]
进一步地,步骤二具体如下:
[0019]
(1)规定任务按照编号从1到k的顺序依次被多无人机协同执行,初始时k=1;初始化无人机n的初位置标识φn=0、末位置标识航行时间t
′n=0、悬停时间t
″n=0、执行任务时间t
″′n=0和作业时间tn=0,n=1,2,...,n;初始化目标受制时间m=1,2,...,m;初始化各任务在各目标处执行时间m=1,2,...,m,k=1,2,...,k;
[0020]
(2)规定无人机按照编号从1到n的顺序依次执行当前任务k,初始时n=1;
[0021]
(3)判断是否满足n≤n;若满足,则继续执行;若不满足,则转至第(7)步;
[0022]
(4)判断无人机n是否需要执行当前任务k,即判断是否满足γn(qk)>0,其中qk为任务分配矩阵中的第k列矩阵,γn(
·
)为矩阵元素个数提取函数,且满足该元素值为n;若满足,则初始化无人机n对于当前任务k的执行次数继续执行;否则,令n=n+1,返回第(3)步;
[0023]
(5)令无人机n末位置标识令无人机n航行更新时间令无人机n悬停更新时间令无人机n执行任务更新时间令无人机n作业更新时间令无人机n初位置标识令无人机n相应
目标受制时间令当前任务k在相应目标处执行时间其中,为矩阵元素行值提取函数,且满足该元素值为n,元素按行第次出现;为数值修正函数,数值非负时不修正,数值为负时修正为0;d(
·
)为向量间欧式距离;
[0024]
(6)判断是否满足若满足,则令n=n+1,返回第(3)步;否则,更新无人机n对于当前任务k的执行次数,令次数,令返回第(5)步;
[0025]
(7)全部无人机返航判断,即判断是否满足k=k;若满足,则全部无人机返航,令无人机n航行更新时间令无人机n作业更新时间n=1,2,...,n;否则,令k=k+1,返回第(2)步。
[0026]
进一步地,步骤三具体如下:
[0027]
建立多无人机协同任务分配效能函数其中,δ1为任务时间约束惩罚项,δ2为机载性能约束惩罚项,δ3为时间同步约束惩罚项,λ1、λ2和λ3为相应惩罚因子,α1和α2为相应权重因子,t
limit
为任务时间间隔限制。
[0028]
进一步地,步骤四具体如下:
[0029]
设定量子郊狼群规模r
′
=lh,量子郊狼子群个数为l,各子群郊狼规模为h,最大迭代次数为g,迭代次数标号为整数g;第g次迭代时,第w个子群中第i头量子郊狼在u维搜索空间中的量子位置其量子位置的第j维w=1,2,
…
,l,i=1,2,
…
,h,j=1,2,...,u;初代时g=1,初代量子郊狼量子位置的每一维均初始化为[0,1]区间内的均匀随机数。
[0030]
进一步地,步骤五具体如下:
[0031]
第g次迭代时,将全部量子郊狼量子位置的每一维映射到编号解空间范围内,得到全部量子郊狼量子位置的映射态;第g次迭代第w个子群中第i头量子郊狼量子位置映射态映射方程定义为w=1,2,...,l,i=1,2,...,h,j=1,2,...,u,其中,ceil(
·
)为向上取整函数。将第w个子群中第i头量子郊狼量子位置的映射态进行维度变化后代入效能函数中得到效能值其中,上标特指矩阵按m
×
k维重构,且重构方式为先行后列;规定量子郊狼量子位置映射
态所对应的效能值越高,量子郊狼在该量子位置处的社会状态越优。
[0032]
进一步地,步骤六具体如下:
[0033]
将各子群内全部量子郊狼按照社会状态由优到差的顺序排列,规定第g次迭代第w个子群中社会状态最优的量子位置为第g次迭代第w个子群最优量子位置w=1,2,...,l;在各子群最优量子位置的基础上进一步择优选择量子郊狼群的最优量子位置。
[0034]
进一步地,步骤七具体如下:
[0035]
(1)成长过程,定义成长过程下第w个子群中第i头量子郊狼第j维量子位置的更新方程为其中,成长过程下第w个子群中第i头量子郊狼第j维模拟量子旋转角个子群中第i头量子郊狼第j维模拟量子旋转角和为[0,1]区间内的均匀随机数,w=1,2,...,l,i=1,2,...,h,j=1,2,
…
,u,ηw为第w个子群中最优量子郊狼标号,和为第w个子群中随机选择的量子郊狼标号;第w个子群中第i头量子郊狼经历成长过程后其新产生量子位置w=1,2,...,l,i=1,2,...,h;
[0036]
(2)生死过程,定义生死过程下第w个子群中第i头量子郊狼第j维量子位置的更新方程为其中,生死过程下第w个子群中第i头量子郊狼第j维模拟量子旋转角个子群中第i头量子郊狼第j维模拟量子旋转角和为[0,1]区间内的均匀随机数,为标准正态随机数,w=1,2,...,l,i=1,2,
…
,h,j=1,2,
…
,u,和为第w个子群中随机选择的量子郊狼标号;第w个子群中第i头量子郊狼经历生死过程后其新产生量子位置w=1,2,
…
,l,i=1,2,
…
,h;
[0037]
(3)贪婪选择,计算第w个子群中第i头量子郊狼在原量子位置和新产生量子位置处的社会状态,依社会状态最大原则在量子位置集合中贪婪选择出第w个子群中第i头量子郊狼的下一代量子位置w=1,2,
…
,l,i=1,2,
…
,h。
[0038]
进一步地,步骤八具体如下:
[0039]
若满足则随机交换两个子群内两头量子郊狼;若不满足,则继续执行,其中,为[0,1]区间内的均匀随机数,λ
wolf
为驱逐率。
[0040]
进一步地,步骤九具体如下:
[0041]
判断是否达到最大迭代次数g,若未达到,则令g=g+1,返回步骤六;若达到,则终止机制演进,将最后一代量子郊狼群最优量子位置的映射态进行维度变换后作为多无人机协同任务分配矩阵输出。
[0042]
本发明的有益效果在于:
[0043]
与现有技术相比,本发明在原有任务时间、任务时序、机载性能和多机协同的要求下额外考虑三维场景和时间同步约束,并构建相应集中式多无人机协同任务分配模型及效能函数。将任务时序和多机协同约束融入到协同任务分配矩阵的设计中,将任务时间、机载性能和时间同步约束融入到效能函数的设计中。为高效求解任务分配方案,本发明设计了量子郊狼优化机制,其受启发于北美郊狼群的社会组织性和环境适应性,子群内郊狼经历成长和生死过程,子群间郊狼经历驱逐或接纳过程,以提高郊狼种群整体社会状态,并使用模拟量子旋转门来演化量子郊狼量子态,收敛速度快、收敛精度高。经仿真实验证明,本发明所提方法可在三维场景和时间同步等约束下为编队各机分配合理任务目标,可应用于工程实际。
附图说明
[0044]
图1本发明所设计的基于量子郊狼机制的多无人机协同任务分配方法示意图;
[0045]
图2多无人机协同任务分配效能与机制运行次数关系曲线。。
具体实施方式
[0046]
下面结合附图对本发明做进一步描述。
[0047]
本发明由5架无人机组成的无人机编队协同对空中3个目标执行侦察、攻击和评估3项任务。在仿真实验中设定,n=5,m=3,k=3,α1=1,α2=0.01,λ1=0.05,λ2=0.05,λ3=1,t
limit
=20s。编队无人机属性设置如表1所示,目标属性设置如表2所示,任务属性设置如表3-表5所示。
[0048]
在图2中,本发明所设计的基于量子郊狼优化机制的多无人机协同任务分配方法记作qcoa;基于粒子群优化机制的多无人机协同任务分配方法记作pso。为验证量子郊狼机制的高效性,保持二者协同任务分配模型和效能函数相同,但采用的优化机制不同。在qcoa中,设定l=4,h=5,g=100,λ
wolf
=0.005;在pso中,设定粒子数为20,最大迭代次数为100,粒子最大速度为2,最小速度为-2,权重为0.9。实验次数为50,实验结果做统计平均。从图2中可以看出,本发明所设计的基于量子郊狼机制的多无人机协同任务分配方法简单高效,可以应用于工程实际。
[0049]
表1 无人机属性设置
[0050][0051]
表2 目标属性设置
[0052][0053]
表3 侦察概率
[0054][0055]
表4 攻击概率
[0056][0057]
表5 评估概率
[0058][0059]
如图1所示,本发明设计了一种考虑三维场景和时间同步约束下的基于量子郊狼优化机制的集中式多无人机协同任务分配方法,所述方法包括以下步骤:
[0060]
步骤一:建立考虑三维场景和时间同步约束下的多无人机协同任务分配模型。
[0061]
设定任务分配矩阵其中,矩阵元素q
m,k
表示分配无人机q
m,k
到目标m处执行任务k,为整数域,n为编队无人机数,m为目标数,k为任务数。设定无人机n的属性集合其中,为无人机n的起飞机库位置,为无人机n的降落机库位置,vn为无人机n的航行速度,cn为无人机n的任务载荷;设定目标m的属性集合其中,为目标m的位置;设定任务k
的属性集合其中,为任务k被执行所需固定时间,其由无人机性能硬性决定,为任务k在目标m处执行时间,为任务k在目标m处被无人机n成功执行概率。
[0062]
步骤二:编队无人机协同执行所分配任务。
[0063]
(1)规定任务按照编号从1到k的顺序依次被多无人机协同执行,初始时k=1。初始化无人机n的初位置标识φn=0、末位置标识航行时间t
′n=0、悬停时间t
″n=0、执行任务时间t
″′n=0和作业时间tn=0,n=1,2,...,n;初始化目标受制时间m=1,2,...,m;初始化各任务在各目标处执行时间m=1,2,...,m,k=1,2,...,k。
[0064]
(2)规定无人机按照编号从1到n的顺序依次执行当前任务k,初始时n=1。
[0065]
(3)判断是否满足n≤n。若满足,则继续执行;若不满足,则转至第(7)步。
[0066]
(4)判断无人机n是否需要执行当前任务k,即判断是否满足γn(qk)>0,其中qk为任务分配矩阵中的第k列矩阵,γn(
·
)为矩阵元素个数提取函数,且满足该元素值为n。若满足,则初始化无人机n对于当前任务k的执行次数继续执行;否则,令n=n+1,返回第(3)步。
[0067]
(5)令无人机n末位置标识令无人机n航行更新时间令无人机n悬停更新时间令无人机n执行任务更新时间令无人机n作业更新时间令无人机n初位置标识令无人机n相应目标受制时间令当前任务k在相应目标处执行时间其中,为矩阵元素行值提取函数,且满足该元素值为n,元素按行第次出现;为数值修正函数,数值非负时不修正,数值为负时修正为0;d(
·
)为向量间欧式距离。
[0068]
(6)判断是否满足若满足,则令n=n+1,返回第(3)步;否则,更新无人机n对于当前任务k的执行次数,令次数,令返回第(5)步。
[0069]
(7)全部无人机返航判断,即判断是否满足k=k。若满足,则全部无人机返航,令无人机n航行更新时间令无人机n作业更新时间n=1,2,...,n;否则,令k=k+1,返回第(2)步。
[0070]
步骤三:建立考虑三维场景和时间同步约束下的多无人机协同任务分配效能函数。
[0071]
建立多无人机协同任务分配效能函数其中,δ1为任务时间约束惩罚项,δ2为机载性能约束惩罚项,δ3为时间同步约束惩罚项,λ1、λ2和λ3为相应惩罚因子,α1和α2为相应权重因子,t
limit
为任务时间间隔限制。此外,任务时序和多机协同约束已融入到协同任务分配矩阵的设计中。
[0072]
步骤四:初始化量子郊狼群并设定参数。
[0073]
设定量子郊狼群规模r
′
=lh,量子郊狼子群个数为l,各子群郊狼规模为h,最大迭代次数为g,迭代次数标号为整数g。第g次迭代时,第w个子群中第i头量子郊狼在u维搜索空间中的量子位置其量子位置的第j维w=1,2,...,l,i=1,2,...,h,j=1,2,...,u。初代时g=1,初代量子郊狼量子位置的每一维均初始化为[0,1]区间内的均匀随机数。
[0074]
步骤五:定义并计算量子郊狼的社会状态。
[0075]
第g次迭代时,将全部量子郊狼量子位置的每一维映射到编号解空间范围内,得到全部量子郊狼量子位置的映射态。第g次迭代第w个子群中第i头量子郊狼量子位置映射态映射方程定义为w=1,2,...,l,i=1,2,...,h,j=1,2,...,u,其中,ceil(
·
)为向上取整函数。将第w个子群中第i头量子郊狼量子位置的映射态进行维度变化后代入效能函数中得到效能值其中,上标特指矩阵按m
×
k维重构,且重构方式为先行后列。规定量子郊狼量子位置映射态所对应的效能值越高,量子郊狼在该量子位置处的社会状态越优。
[0076]
步骤六:根据量子郊狼社会状态对各子群内全部量子郊狼排序。
[0077]
将各子群内全部量子郊狼按照社会状态由优到差的顺序排列,规定第g次迭代第w个子群中社会状态最优的量子位置为第g次迭代第w个子群最优量子位置w=1,2,...,l。在各子群最优量子位置的基础上进一步择优选择量子郊狼群的最优量子位置。
[0078]
步骤七:各子群内量子郊狼经历成长和生死过程。
[0079]
(1)成长过程,定义成长过程下第w个子群中第i头量子郊狼第j维量子位置的更新方程为其中,成长过程下第w个子群中第i头量子郊狼第j维模拟量子旋转角个子群中第i头量子郊狼第j维模拟量子旋转角和为[0,1]区间内的均匀随机数,w=1,2,...,l,i=1,2,...,h,j=1,2,...,u,ηw为第w个子
群中最优量子郊狼标号,和为第w个子群中随机选择的量子郊狼标号。第w个子群中第i头量子郊狼经历成长过程后其新产生量子位置w=1,2,...,l,i=1,2,...,h。
[0080]
(2)生死过程,定义生死过程下第w个子群中第i头量子郊狼第j维量子位置的更新方程为其中,生死过程下第w个子群中第i头量子郊狼第j维模拟量子旋转角个子群中第i头量子郊狼第j维模拟量子旋转角和为[0,1]区间内的均匀随机数,为标准正态随机数,w=1,2,...,l,i=1,2,...,h,j=1,2,...,u,和为第w个子群中随机选择的量子郊狼标号。第w个子群中第i头量子郊狼经历生死过程后其新产生量子位置w=1,2,...,l,i=1,2,...,h。
[0081]
(3)贪婪选择,计算第w个子群中第i头量子郊狼在原量子位置和新产生量子位置处的社会状态,依社会状态最大原则在量子位置集合中贪婪选择出第w个子群中第i头量子郊狼的下一代量子位置w=1,2,...,l,i=1,2,...,h。
[0082]
步骤八:各子群间量子郊狼经历驱逐或接纳过程。
[0083]
若满足则随机交换两个子群内两头量子郊狼;若不满足,则继续执行。其中,为[0,1]区间内的均匀随机数,λ
wolf
为驱逐率。
[0084]
步骤九:演进终止判断,输出多无人机协同任务分配方案。
[0085]
判断是否达到最大迭代次数g,若未达到,则令g=g+1,返回步骤六;若达到,则终止机制演进,将最后一代量子郊狼群最优量子位置的映射态进行维度变换后作为多无人机协同任务分配矩阵输出。
[0086]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1