一种考虑引力补偿的直接制导方法与流程
1.本发明属于飞行器制导与控制领域,涉及一种考虑引力补偿的直接制导方法。
背景技术:
2.现有迭代制导和闭路制导方案,是以火箭当前速度和位置矢量作为初值,以预测入轨点的速度和位置矢量作为终端条件,以燃料消耗最少作为性能指标,根据极大值原理实时计算出一条弹道,并控制火箭沿这条弹道飞行。但现有技术方案存在以下不足:1)对引力及速度进行了平均假设,导致对于长时间飞行任务或全程飞行中引力加速度变化较大的任务,会由于平均引力假设不成立,而造成求解过程不收敛,使得这些制导方案的适应性大打折扣;2)对于常规飞行任务,由于采用了平均引力加速,导致得到的制导指令与真实的最优制导指令有差距,需要飞行器燃料有较大的余量,才能适应各项不确定性和平均引力假设带来的程序角近似,会造成飞行器的总体设计更加保守。
技术实现要素:
3.本发明解决的技术问题是:克服现有技术的不足,提出一种考虑引力补偿的直接制导方法,在现有的直接制导方法中,考虑了引力补偿,得到的制导指令更接近真实的最优制导指令,提高了制导精度,任务适应性更强。
4.本发明解决技术的方案是:一种考虑引力补偿的直接制导方法,包括如下步骤:步骤一、在惯性坐标系下建立火箭飞行动力学模型,所述火箭在大气层外的飞行动力学模型为动力学模型为式中,为火箭在惯性坐标系的实时位置矢量,为火箭在惯性坐标系的实时速度矢量;为单位推力矢量,即飞行过程中的控制量,为推力加速度大小,为引力加速度;步骤二、根据当前点与目标点之间的视速度增量计算平均俯仰程序角及平均偏航程序角,利用迭代制导方法,获得进入目标轨道的最优俯仰角指令和最优偏航角指令;步骤三、利用最优俯仰角指令和最优偏航角指令进行制导飞行,将飞行轨迹离散为n个点,n》100,通过数值积分计算目标点位置和速度;步骤四、对得到的n个离散点处的引力加速度进行数值积分,求解得到引力加速度引起的速度增量和位置增量;步骤五、重复步骤二—四,直到某次计算结果满足如下条件:计算得到的引力加速度引起的速度增量与前一次计算得到的速度增量的差值小于速度增量阈值,且引力加速度引起的位置增量与前一次计算得到的位置增量的差值小于位置增量阈值;
则认为当前计算得到的速度增量和位置增量 收敛,进入步骤七;步骤六、通过迭代制导,得到引力补偿后的实时最优俯仰角指令和偏航角指令,实现考虑引力补偿的制导飞行。
5.优选的,所述步骤一中,,其中,t为火箭推力大小,m为火箭质量。
6.优选的,所述步骤一中,,其中, 为地球引力系数。
7.优选的,在实际求解过程中,引力加速度采用平均引力加速度进行初始化,即其中,为惯性坐标系下x、y、z轴的平均引力加速度,为当前点对应的惯性坐标系下x、y、z轴的引力加速度,为目标点对应的惯性坐标系x、y、z轴的引力加速度。
8.优选的,所述步骤二中,根据当前点与目标点之间的视速度增量计算平均俯仰程序角及平均偏航程序角的公式如下:的公式如下:其中为惯性坐标系下当前点与目标点之间在x、y、z轴三个方向的视速度增量。
9.优选的,所述步骤二中,t时刻进入目标轨道的最优俯仰角指令和最优偏航角指令满足:满足:其中,为利用迭代制导计算得到的制导系数。
10.优选的,所述步骤三中,目标点位置和速度满足:满足:其中为加速度敏感的视加速度值,为当前剩余的飞行时间,为初始点速度,为初始点位置,为引力加速度引起的速度增量,为引力加速度引起的位置增量。
11.优选的,所述步骤四中,引力加速度引起的速度增量和位置增量满足:满足:其中,为第个离散点的引力加速度值,为平均离散时间,为当前剩余的飞行时间。
12.优选的,所述步骤六中,t时刻,引力补偿后的实时最优俯仰角指令和最优偏航角指令如下:如下:其中,为根据入轨点与目标点之间的视速度增量计算得到的平均俯仰程序角,为根据入轨点与目标点计算得到的平均偏航程序角,为利用迭代制导最新计算得到的制导系数。
13.优选的,当速度增量和位置增量收敛时,火箭位置即为入轨点。
14.本发明与现有技术相比的有益效果是:(1)本发明对直接制导方法的引力加速度项进行了补偿,可精确得到飞行器的最优制导指令,更接近真实的最优制导指令,提高了实时生成制导指令的最优性,减轻了飞行器总体设计的负担。
15.(2)本发明对引力加速度项进行了补偿,不再进行平均假设,可适应传统直接制导方法无法适应的长时间、大弧段飞行任务,增强了制导方法的任务适应性。
附图说明
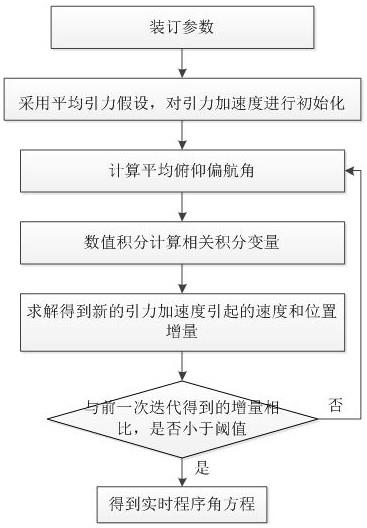
16.图1为引力补偿直接制导方法流程图;图2为利用引力补偿直接制导方法计算得到的俯仰角仿真曲线;图3为利用引力补偿直接制导方法计算得到的高度变化曲线。
具体实施方式
17.下面结合附图对本发明作进一步阐述。
18.本发明方法是基于引力补偿的直接制导程序角计算方法。该方法在求解了平均程序角的基础上,通过精确估算飞行过程中引力加速度引起的飞行器速度和位置增量,来替换原平均引力假设下引力加速度引起的飞行器速度和位置增量,实现对飞行器终端速度和位置的精确估计,进而完成偏航角和俯仰角程序角的准确计算,用于飞行控制。
19.具体地,如图1所示,本发明一种考虑引力补偿的直接制导方法,步骤如下:
1)装订参数起飞前,将飞行任务终端的各项参数装订于箭载软件中。各项参数包括火箭当前的速度、位置、飞行过载、目标轨道的轨道根数、入轨点速度、位置的初始猜想值。
20.2)动力学建模在惯性坐标系下建立火箭飞行动力学模型,火箭在大气层外的飞行动力学方程为(1)(2)式中,为火箭在惯性坐标系的实时位置矢量,为火箭在惯性坐标系的实时速度矢量,,,为单位推力矢量,即飞行过程中的控制量,为推力加速度大小,为引力加速度。其中,,为地球引力系数,,其中,t为火箭推力大小,m为火箭质量。
21.在实际求解过程中,引力加速度采用平均引力加速速度
ꢀꢀꢀꢀ
(3)其中,为惯性坐标系下x、y、z轴的平均引力加速度,为当前点对应的惯性坐标系下x、y、z轴的引力加速度,为目标点对应的惯性系三个方向引力加速度。
22.3)计算平均俯仰、偏航程序角根据当前点与目标点之间的视速度增量计算平均俯仰程序角及平均偏航程序角,如下所示
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)其中为当前点与目标点之间的三个方向下的视速度增量。利用迭代制导,可得进入目标轨道的最优俯仰角和最优偏航角指令:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)其中,为利用迭代制导计算的到制导系数。
23.4)预估最终位置将飞行轨迹离散为n个点(n》100),比如n可以取20。通过数值积分计算终端位置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9) 其中为加速度敏感的视加速度值,为当前剩余的飞行时间,为初始点速度,为初始点位置,为引力加速度引起的速度增量,为引力加速度引起的位置增量。
24.5) 更新由引力加速度引起的速度和位置增量对得到的n个离散点处的引力加速度进行数值积分,积分公式见公式(10)、(11),求解得到新的引力加速度引起的增量和位置增量。
25.ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)其中,为第个离散点的引力加速度值,为平均离散时间。
26.6)重复步骤3)-5),直到最后一次计算得到的引力加速度引起的速度增量与前一次计算得到的速度增量的差值小于速度增量阈值,且引力加速度引起的位置增量与前一次计算得到的位置增量的差值小于位置增量阈值;7) 利用最终收敛得到的速度增量和位置增量,利用迭代制导,可得到引力补偿后的实时程序角方程
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)其中,为根据最新收敛得到的入轨点位置和速度,利用公式(2)、(3)计算得到的平均俯仰角和偏航角,为利用迭代制导最新计算的到制导系数。
27.实施例:以某型火箭为对象,考虑主发动机故障引起推力下降,导致火箭飞行时间增加,飞行弧段增长,利用本发明的基于引力补偿的直接制导方法,得到仿真结果,包括最终进入预定轨道的轨道要素、故障时刻到入轨时刻的飞行轨迹等。
28.基于引力补偿的直接制导算例如下:入轨目标:该飞行段结束时刻,火箭进入目标椭圆形轨道,椭圆轨道近地点高度200km,远地点高度20000km。
29.算力工况:设定火箭发生故障时刻为1280s,发生的故障为推力下降30%,要求火箭最终进入目标椭圆形轨道。
30.直接制导结果:在上述算例下,火箭主发动机在1280s发生故障,推力下降30%,通过本发明提出的基于引力补偿的直接制导方法,在保证可用燃料不变的情况下,火箭飞行
时间变长,最终火箭在高度508.8km处完成入轨,入轨时刻对应的真近点角为58.6
°
,这是由于动力故障导致火箭入轨时间延后(得到的俯仰角指令fal仿真结果图见图2,高度height变化结果图见图3)。如果在该工况下,不采用引力补偿,利用传统的基于平均引力假设的直接制导方法,则可能会出现发散的情况。
31.本发明提出的引力补偿直接制导方法,能够适应火箭小推力、大弧段动力飞行任务中的精确入轨,可为未来深空探测中的火箭长时间飞行提供支撑,同时可适应火箭发生推力下降故障导致飞行时间延长、入轨弧段增大的制导任务,提升火箭的动力故障适应性。
32.本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1