一种人工智能教学机器人防碰撞预警系统和方法与流程
1.本技术涉及机器人技术领域,尤其是涉及一种人工智能教学机器人防碰撞预警系统和方法。
背景技术:
2.目前机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,用途十分广泛,可在军事、医疗、建筑等方面进行使用个,根据不断的发展,机器人同时可以应用于教学方面进行辅助,教育机器人,除了机器人机体本身之外,还有相应的控制软件和教学课本等,教育机器人因为适应新课程,对学生科学素养的培养和提高起到了积极的作用,在众多中小学学校得以推广
3.现有一种人工智能教学机器人在导航至目标所在地的时候,会直接移动过去,在过去的过程中再根据障碍物情况选择是否进行防碰撞预警,让工作人员操控人工智能教学机器人前行。
4.针对上述中的相关技术,发明人认为存在有如下缺陷:人工智能教学机器人在遇到障碍物的时候,均会通过防碰撞预警,此时需要工作人员来决策是否绕行,较为麻烦。
技术实现要素:
5.为了提高人工智能教学机器人对所遇到的障碍物是否进行绕行的判断能力,本技术提供一种人工智能教学机器人防碰撞预警系统和方法。
6.第一方面,本技术提供一种人工智能教学机器人防碰撞预警方法,采用如下的技术方案:
7.一种人工智能教学机器人防碰撞预警方法,包括:
8.获取人工智能教学机器人行进目的地以及出发地;
9.根据人工智能教学机器人行进目的地以及出发地,规划人工智能教学机器人的行进路线;
10.启动人工智能教学机器人按照所规划的行进路线行进;
11.获取所规划行进路线上是否存在障碍物;
12.若存在障碍物则控制人工智能教学机器人绕过障碍物并回归至所规划行进路线,直至人工智能教学机器人到达目的地,若绕不过障碍物则作防碰撞预警提醒。
13.可选的,根据人工智能教学机器人行进目的地以及出发地,规划人工智能教学机器人的行进路线包括:
14.根据人工智能教学机器人行进目的地以及出发地,初步规划所有行进路线;
15.根据预设的障碍物分布位置以及初步规划的行进路线,规划绕过初步规划路线上的障碍物至目的地的所有路线,并获取相应路线的距离;
16.根据相应路线的距离以及人工智能教学机器人的行进速度,分析获取耗时最短的路线作为人工智能教学机器人的行进路线。
17.可选的,分析获取耗时最短的路线作为人工智能教学机器人的行进路线包括:
18.获取相应路线所包含的直线路段以及转弯路段;
19.根据直线路线的距离与人工智能教学机器人的直线行进速度、转弯路段的距离与人工智能教学机器人的转弯行进速度,分析获取相应路线的整体耗时;
20.选择整体耗时最短所对应的路线作为人工智能教学机器人的行进路线。
21.可选的,还包括位于分析获取相应路线的整体耗时之后且在选择整体耗时最短所对应的路线作为人工智能教学机器人的行进路线之前的步骤,具体如下:
22.根据相应路线在不同时段的平均延迟耗时以及当前时段,分析确定路线在当前时段的平均延迟耗时;
23.基于路线在当前时段的平均延迟耗时、所分析获取的相应路线整体耗时,重新计算获取整体耗时。
24.可选的,若存在障碍物则控制人工智能教学机器人绕过障碍物并回归至所规划行进路线,直至人工智能教学机器人到达目的地包括:
25.分析障碍物类型;
26.若障碍物类型为个体,则分析获取个体的运动趋势,并基于个体与人工智能教学机器人的距离、人工智能教学机器人的移动速度、个体的平均移动速度,分析判断人工智能教学机器人与个体是否相遇;
27.若为是,则计算获取相遇时间节点以及相遇位置,并规划人工智能教学机器人在所分析判断的相遇时间节点之前的预设时段内提前绕行并重新回归到所规划路线,直至控制人工智能教学机器人到达目的地;
28.若为否,则控制人工智能教学机器人到达目的地;
29.若障碍物类型为实体,则控制人工智能教学机器人绕过障碍物并回归至所规划行进路线,直至人工智能教学机器人到达目的地。
30.可选的,规划人工智能教学机器人在所分析判断的相遇时间节点之前的预设时段内提前绕行并重新回归到所规划路线,直至控制人工智能教学机器人到达目的地包括:
31.分析相遇位置相遇的个体的数量是否为多个;
32.当相遇位置相遇的个体的数量为多个时,规划人工智能教学机器人在所分析判断的相遇时间节点之前的预设时段内提前绕行所有个体的行进路线后重新回归到所规划路线,直至控制人工智能教学机器人到达目的地。
33.可选的,规划人工智能教学机器人在所分析判断的相遇时间节点之前的预设时段内提前绕行所有个体的行进路线后重新回归到所规划路线,直至控制人工智能教学机器人到达目的地包括:
34.若所有个体的行进路线覆盖了人工智能教学机器人的所有行进路线,则判断后续个体是否经过现人工智能教学机器人所在位置;
35.若为是,则控制人工智能教学机器人沿原出发路径移动预设距离,直至后续个体的行进路线不会经过人工智能教学机器人移动后的位置为止;
36.当后续个体与人工智能教学机器人的距离超过预设距离,则控制人工智能教学机器人沿规划路径到达目的地;
37.若为否,则不移动,直至后续个体与人工智能教学机器人的距离超过预设距离,则
控制人工智能教学机器人沿规划路径到达目的地。
38.可选的,还包括与若存在障碍物则控制人工智能教学机器人绕过障碍物并回归至所规划行进路线,直至人工智能教学机器人到达目的地并行的步骤,具体如下:
39.获取不在初步规划路线上的障碍物;
40.将相应障碍物作为标记,并记入相应初步规划路线上的障碍物中。
41.第二方面,本技术提供一种人工智能教学机器人防碰撞预警系统,采用如下的技术方案:
42.一种人工智能教学机器人防碰撞预警系统,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序,该程序能够被处理器加载执行时实现如第一方面所述的人工智能教学机器人防碰撞预警方法。
附图说明
43.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
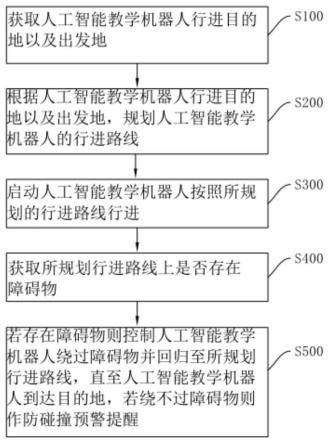
44.图1是本技术实施例一种人工智能教学机器人防碰撞预警方法的流程示意图。
45.图2是本技术另一实施例根据人工智能教学机器人行进目的地以及出发地,规划人工智能教学机器人的行进路线的流程示意图。
46.图3是本技术另一实施例分析获取耗时最短的路线作为人工智能教学机器人的行进路线的流程示意图。
47.图4是本技术另一实施例位于分析获取相应路线的整体耗时之后且在选择整体耗时最短所对应的路线作为人工智能教学机器人的行进路线之前的步骤的流程示意图。
48.图5是本技术另一实施例若存在障碍物则控制人工智能教学机器人绕过障碍物并回归至所规划行进路线,直至人工智能教学机器人到达目的地的流程示意图。
49.图6是本技术另一实施例规划人工智能教学机器人在所分析判断的相遇时间节点之前的预设时段内提前绕行并重新回归到所规划路线,直至控制人工智能教学机器人到达目的地的流程示意图。
50.图7是本技术另一实施例规划人工智能教学机器人在所分析判断的相遇时间节点之前的预设时段内提前绕行所有个体的行进路线后重新回归到所规划路线,直至控制人工智能教学机器人到达目的地的流程示意图。
51.图8是与若存在障碍物则控制人工智能教学机器人绕过障碍物并回归至所规划行进路线,直至人工智能教学机器人到达目的地并行的流程示意图。
具体实施方式
52.以下结合附图对本技术作进一步详细说明。
53.参照图1,为本技术公开一种人工智能教学机器人防碰撞预警方法,其特征在于,包括:
54.步骤s100,获取人工智能教学机器人行进目的地以及出发地。
55.步骤s200,根据人工智能教学机器人行进目的地以及出发地,规划人工智能教学机器人的行进路线。
56.步骤s300,启动人工智能教学机器人按照所规划的行进路线行进。
57.步骤s400,获取所规划行进路线上是否存在障碍物。
58.其中,所规划行进路线上是否存在障碍物的获取是从预设的存储有行进路线上所存在障碍物的数据库中查询获取的。
59.步骤s500,若存在障碍物则控制人工智能教学机器人绕过障碍物并回归至所规划行进路线,直至人工智能教学机器人到达目的地,若绕不过障碍物则作防碰撞预警提醒。
60.在图1的步骤s200中,进一步考虑到选择行进路线的时候可以根据耗时来进行选择,因此需要进一步规划人工智能教学机器人的行进路线,具体参照图2所示实施例作详细说明。
61.参照图2,根据人工智能教学机器人行进目的地以及出发地,规划人工智能教学机器人的行进路线包括:
62.步骤s210,根据人工智能教学机器人行进目的地以及出发地,初步规划所有行进路线。
63.步骤s220,根据预设的障碍物分布位置以及初步规划的行进路线,规划绕过初步规划路线上的障碍物至目的地的所有路线,并获取相应路线的距离。
64.步骤s230,根据相应路线的距离以及人工智能教学机器人的行进速度,分析获取耗时最短的路线作为人工智能教学机器人的行进路线。
65.其中,具体来说,耗时最短的路线的分析获取采用如下方式:以相应路线的距离作为被除数,人工智能教学机器人的行进速度作为除数,获取的商即为路线的耗时,然后从所有路线的耗时中选择其中耗时最短所对应的路线作为人工智能教学机器人的行进路线。
66.在图2的步骤s230,进一步考虑到由于人工智能教学机器人并不只有直线行驶,还存在绕道转弯的情况,因此在计算耗时的时候要充分考虑不同场景下的行进速度有所不同,因此需要进一步分析获取耗时最短的路线作为人工智能教学机器人的行进路线,具体参照图3所示实施例作详细说明。
67.参照图3,分析获取耗时最短的路线作为人工智能教学机器人的行进路线包括:
68.步骤s231,获取相应路线所包含的直线路段以及转弯路段。
69.步骤s232,根据直线路线的距离与人工智能教学机器人的直线行进速度、转弯路段的距离与人工智能教学机器人的转弯行进速度,分析获取相应路线的整体耗时。
70.具体来说,相应路线的整体耗时的分析获取如下:根据直线路线的距离与人工智能教学机器人的直线行进速度,可以分析直线路线的耗时,而根据转弯路段的距离与人工智能教学机器人的转弯行进速度,可以分析转弯路线的耗时,直线路线的耗时与析转弯路线的耗时相加的和即为相应路线的整体耗时。
71.步骤s233,选择整体耗时最短所对应的路线作为人工智能教学机器人的行进路线。
72.在图3的步骤s232以及步骤s233之间,进一步考虑到可能在不同时段会存在一定移动障碍物的情况,影响路线的耗时,具体参照图4所示实施例作详细说明。
73.参照图4,一种人工智能教学机器人防碰撞预警方法还包括位于分析获取相应路
线的整体耗时之后且在选择整体耗时最短所对应的路线作为人工智能教学机器人的行进路线之前的步骤,具体如下:
74.步骤sa00,根据相应路线在不同时段的平均延迟耗时以及当前时段,分析确定路线在当前时段的平均延迟耗时。
75.路线在当前时段的平均延迟耗时可以以当前时段作为查询对象,从预设的存储有相应路线在不同时段的平均延迟耗时的数据库中查询获取。
76.步骤sb00,基于路线在当前时段的平均延迟耗时、所分析获取的相应路线整体耗时,重新计算获取整体耗时。
77.整体耗时的重新计算如下:将路线在当前时段的平均延迟耗时与所分析获取的相应路线整体耗时相加。
78.在图1的步骤s500中,进一步考虑实际人工智能教学机器人移动过程中会遇到移动障碍物的可能性,具体参照图5所示实施例作详细说明。
79.参照图5,若存在障碍物则控制人工智能教学机器人绕过障碍物并回归至所规划行进路线,直至人工智能教学机器人到达目的地包括:
80.步骤s510,分析障碍物类型。
81.步骤s520,若障碍物类型为个体,则分析获取个体的运动趋势,并基于个体与人工智能教学机器人的距离、人工智能教学机器人的移动速度、个体的平均移动速度,分析判断人工智能教学机器人与个体是否相遇。若为是,则执行步骤s530;若为否,则执行步骤s540。
82.其中,个体的运动趋势即为个体的运动朝向,个体的运动趋势的分析可以通过图像识别获取个体的运动朝向,从而获取个体的运动趋势;人工智能教学机器人与个体是否相遇的分析判断即为:根据人工智能教学机器人的移动速度以及行进路线,规划出每个时间节点所在的位置,同理,根据个体的运动趋势以及个体的平均移动速度,可以分析确定每个时间节点个体的所在位置,从而来判断是否存在同一时间节点两者相遇的可能性。
83.步骤s530,计算获取相遇时间节点以及相遇位置,并规划人工智能教学机器人在所分析判断的相遇时间节点之前的预设时段内提前绕行并重新回归到所规划路线,直至控制人工智能教学机器人到达目的地。
84.步骤s540,控制人工智能教学机器人到达目的地。
85.步骤s550,若障碍物类型为实体,则控制人工智能教学机器人绕过障碍物并回归至所规划行进路线,直至人工智能教学机器人到达目的地。
86.在图5的步骤s530,进一步考虑到个体有多个的情况,具体通过图6所示实施例作详细说明。
87.参照图6,规划人工智能教学机器人在所分析判断的相遇时间节点之前的预设时段内提前绕行并重新回归到所规划路线,直至控制人工智能教学机器人到达目的地包括:
88.步骤s531,分析相遇位置相遇的个体的数量是否为多个。
89.步骤s532,当相遇位置相遇的个体的数量为多个时,规划人工智能教学机器人在所分析判断的相遇时间节点之前的预设时段内提前绕行所有个体的行进路线后重新回归到所规划路线,直至控制人工智能教学机器人到达目的地。
90.在图6的步骤s532中,进一步考虑到个体多个且可能都会与人工智能机器人相遇的情况,此时通过图7所示实施例作详细说明。
91.参照图7,规划人工智能教学机器人在所分析判断的相遇时间节点之前的预设时段内提前绕行所有个体的行进路线后重新回归到所规划路线,直至控制人工智能教学机器人到达目的地包括:
92.步骤s532.1,若所有个体的行进路线覆盖了人工智能教学机器人的所有行进路线,则判断后续个体是否经过现人工智能教学机器人所在位置。若为是,则执行步骤s532.2;若为否,则执行步骤s532.4。
93.步骤s532.2,控制人工智能教学机器人沿原出发路径移动预设距离,直至后续个体的行进路线不会经过人工智能教学机器人移动后的位置为止。
94.预设距离即为路线不在个体在退到相应位置后,个体行进路线与人工智能教学机器人行进路线交错位置在个体所退位置之前。
95.步骤s532.3,当后续个体与人工智能教学机器人的距离超过预设距离,则控制人工智能教学机器人沿规划路径到达目的地。
96.步骤s532.4,不移动,直至后续个体与人工智能教学机器人的距离超过预设距离,则控制人工智能教学机器人沿规划路径到达目的地。
97.参照图8,一种人工智能教学机器人防碰撞预警方法还包括与若存在障碍物则控制人工智能教学机器人绕过障碍物并回归至所规划行进路线,直至人工智能教学机器人到达目的地并行的步骤,具体如下:
98.步骤sa00,获取不在初步规划路线上的障碍物。
99.步骤sb00,将相应障碍物作为标记,并记入相应初步规划路线上的障碍物中。
100.基于同一发明构思,本发明实施例提供一种人工智能教学机器人防碰撞预警系统,包括存储器、处理器,存储器上存储有可在所述处理器上运行实现如图1至图8任一种方法的程序。
101.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1