一种通过姿态偏置利用面外推力器实现离轨控制方法与流程
1.本公开实施例涉及航天器在轨管理技术领域,尤其涉及一种通过姿态偏置利用面外推力器实现离轨控制方法。
背景技术:
2.因在轨geo(geosynchronous earth orbit,地球同步轨道)卫星星上设备功能衰退或星上燃料不足,存在卫星失联失控风险的情况,需要对卫星进行离轨钝化处置,以避免对geo轨道其它卫星的造成的不利影响,且不再占用geo轨道宝贵的轨位资源。相关技术中,利用二阶日月项对geo坟墓轨道的摄动特性,通过设置近地点的方向于90度或者270度,来有效抑制大偏心率坟墓轨道近地点的下降,该方法第一次点火时刻需卫星位于赤经90度或270度。但是上述方法对控制时间具有一定的要求,无法直接应用于切向推力器异常的geo卫星的离轨控制工作。
3.因此,有必要改善上述相关技术方案中存在的一个或者多个问题。
4.需要注意的是,本部分旨在为权利要求书中陈述的本公开的技术方案提供背景或上下文。此处的描述不因为包括在本部分中就承认是现有技术。
技术实现要素:
5.本公开实施例的目的在于提供一种通过姿态偏置利用面外推力器实现离轨控制方法,进而至少在一定程度上克服由于相关技术的限制和缺陷而导致的一个或者多个问题。
6.根据本公开实施例,提供一种通过姿态偏置利用面外推力器实现离轨控制方法,该方法包括:
7.利用星敏感器确定卫星离轨控制时间区间;
8.通过卫星的特性参数,确定卫星最小可使用剩余燃料量,并计算卫星离轨控制可用的速度增量;
9.根据所述可用的速度增量、半长轴及卫星姿态偏置角,计算总半长轴控制量和总喷气时长,并确定卫星离轨控制策略;
10.计算推力器效率因子,并根据所述推力器效率因子对所述卫星离轨控制策略中的控制参数进行参数调整。
11.本公开的一实施例中,所述利用星敏感器确定卫星离轨控制时间区间的过程包括:
12.根据星敏感器的参量,计算太阳矢量位置,并得到所述太阳矢量位置与星敏光轴之间的相对夹角;
13.根据所述太阳矢量位置与星敏光轴之间的相对夹角,确定星敏受杂散光干扰的时间段,从而确定卫星离轨控制时间区间。
14.本公开的一实施例中,所述太阳矢量位置与星敏光轴之间的相对夹角包括:
15.太阳面外夹角和太阳面内夹角。
16.本公开的一实施例中,所述太阳面外夹角α<110
°
,且所述太阳面内夹角-30
°
<β<130
°
时,对应时间为所述星敏受杂散光干扰的时间段。
17.本公开的一实施例中,所述通过卫星的特性参数,确定卫星最小可使用剩余燃料量的过程包括:
18.根据卫星的所述特性参数,采用pvt法计算推进剂剩余量,所述特性参数包括推进剂贮箱的压力和温度数据;
19.根据所述推进剂剩余量,计算得到所述卫星最小可使用剩余燃料量。
20.本公开的一实施例中,所述根据所述可用的速度增量、半长轴及卫星姿态偏置角,计算总半长轴控制量和总喷气时长的过程包括:
21.根据切向半长轴目标控制量得到切向速度增量;
22.根据所述切向速度增量得到离轨控制总速度增量及法向速度增量,并得到法向半长轴目标控制量;
23.根据切向半长轴目标控制量和所述法向半长轴目标控制量得到总半长轴控制量,且根据所述离轨控制总速度增量得到所述总喷气时长。
24.本公开的一实施例中,所述确定卫星离轨控制策略的过程包括:
25.根据所述总半长轴控制量和所述总喷气时长,采用多次平均量机动控制加修正量机动控制相结合的控制方法。
26.本公开的一实施例中,采用在远近地点处间隔12小时的时间间隔进行控制,先进行1批次试喷,再根据2*n次控制实施平均分配剩余目标控制量。
27.本公开的一实施例中,所述计算推力器效率因子,并根据所述推力器效率因子对所述卫星离轨控制策略中的控制参数进行参数调整的过程包括:
28.控后轨道确定,计算控后实际的半长轴变化量,并得到所述推力器效率因子;
29.若所述效率因子在(0.85,0.97]或[1.03,1.05)范围内,则进行参数调整,所述参数包括推力器标定系数。
[0030]
本公开的实施例提供的技术方案可以包括以下有益效果:
[0031]
本公开的实施例中,通过上述通过姿态偏置利用面外推力器实现离轨控制方法,一方面,能够保证geo卫星离轨控制结束后,轨道高度位于同步带上方280千米以上、偏心率小于0.003,避免由于卫星偏心率过大造成卫星频繁穿越同步带的问题。另一方面,解决了卫星因切向推力器异常采用大角度姿态偏置进行面外推力离轨控制时,因星敏受杂散光影响,存在控制时间受限的问题。
附图说明
[0032]
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0033]
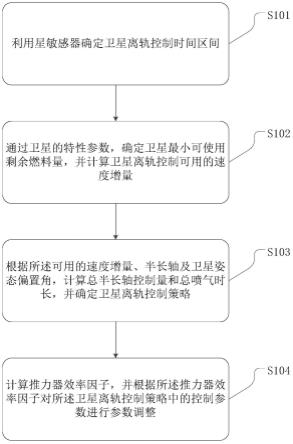
图1示出本公开示例性实施例中通过姿态偏置利用面外推力器实现离轨控制方法步骤图;
[0034]
图2示出本公开示例性实施例中卫星姿态偏置后切向和法向速度关系图。
具体实施方式
[0035]
现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本公开将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施方式中。
[0036]
此外,附图仅为本公开实施例的示意性图解,并非一定是按比例绘制。图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。附图中所示的一些方框图是功能实体,不一定必须与物理或逻辑上独立的实体相对应。
[0037]
本示例实施方式中首先提供了一种通过姿态偏置利用面外推力器实现离轨控制方法。参考图1中所示,该方法可以包括:步骤s101~步骤s104。
[0038]
步骤s101:利用星敏感器确定卫星离轨控制时间区间;
[0039]
步骤s102:通过卫星的特性参数,确定卫星最小可使用剩余燃料量,并计算卫星离轨控制可用的速度增量;
[0040]
步骤s103:根据所述可用的速度增量、半长轴及卫星姿态偏置角,计算总半长轴控制量和总喷气时长,并确定卫星离轨控制策略;
[0041]
步骤s104:计算推力器效率因子,并根据所述推力器效率因子对所述卫星离轨控制策略中的控制参数进行参数调整。
[0042]
具体的,在步骤s101中,卫星因切向推力器异常采用大角度姿态偏置进行面外推力离轨控制时,因星敏受杂散光影响,存在控制时间受限的问题。而进行小角度姿态偏置时(偏置角小于10
°
),存在全天均可进行控制的时间区间,选择此时间区间进行离轨控制,可满足采用多次平均量机动控制加修正量机动控制相结合的控制方法,在远近地点处间隔12小时进行控制的时间间隔。
[0043]
考虑星敏受杂散光影响的可控时间段计算方法如下:
[0044]
计算轨道系下的太阳矢量位置
[0045]
根据星敏安装布局设计,太阳矢量在星敏测量坐标系下的矢量表示为:式中,a
st
为转换矩阵。
[0046]
根据星敏受杂散光影响条件,确定星敏受杂散光干扰的时间段,从而确定可控时间区间。
[0047]
太阳矢量在星敏测量坐标系x,y,z轴的分量分别为在星敏测量坐标系x,y,z轴的分量分别为定义太阳面外夹角太阳面内夹角当太阳矢量在星敏测量坐标系满足下列几何关系时:α<110
°
且-30
°
<β<130
°
时,星敏受太阳杂光影响无法正常输出信息,其余情况对应的时间段为卫星可控时间段。
[0048]
在步骤s102中,根据卫星推进剂贮箱的压力和温度数据,采用pvt(气体定律)法计算卫星剩余燃料后,针对剩余燃料计算结果,需要考虑:剩余燃料计算误差和推进剂挤出效
率。根据卫星在轨实际情况修正计算为:使用pvt法计算推进剂剩余量,其理论计算误差按贮箱的1.9%,贮箱的挤出效率指标为99%,得出卫星最小可使用的剩余燃料。卫星最小可使用剩余燃料量的公式为:
[0049]
δm=δm
0-δm0·
0.019-δm0·
0.01
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0050]
式中,δm为卫星最小可使用剩余燃料量,δm0为推进剂消耗量。
[0051]
已知卫星质量,比冲等卫星常数以及步骤二中计算的卫星剩余燃料,利用动量守恒公式,计算出卫星可用的速度增量:
[0052]
δm
·isp
=f
·
δt=m
·
δv
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0053][0054]
式中,i
sp
推力器比冲;f发动机推力,δt为推力器工作时长,m为卫星质量,δv可用的速度增量。
[0055]
在步骤s103中,利用面外推力器进行离轨控制的关键是将卫星偏航机动一定小的角度α,在满足步骤一计算条件的前提下,同步实现半长轴的抬高和燃料的排放操作。已知切向半长轴目标控制量δa
t
:
[0056]
δa
t
=2a
svt
/vsꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0057]
由图2可知:
[0058]vt
=v
·
sinα
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0059]vn
=v
·
cosα
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0060]
其中,v
t
为切向速度增量,vn为法向速度增量,v为离轨控制总速度增量,vs为标称轨道速度,as为标称轨道高度。
[0061]
由公式(5),可知v:
[0062]
v=v
t
/sinα=δa
tvs
/(2as·
sinα)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0063]
南北控制所施加的法向速度增量,在改变卫星速度方向的同时,也改变了速度的大小,由此造成轨道半长轴的变化,该变化量在法向速度增量较小时对卫星半长轴影响不大,一般不予考虑,但在离轨控制过程中,需考虑该量,设法向速度增量对半长轴影响为δa
nt
:
[0064][0065]
总半长轴变化量δa和总喷气时长δt分别为:
[0066]
δa=δa
t
+δa
nt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0067]
δt=mv/f
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0068]
式中,f发动机推力,m为卫星质量。
[0069]
根据计算的总半长轴控制量和总喷气时长,采用多次平均量机动控制加修正量机动控制相结合的控制方法,在远近地点处间隔12小时进行控制的时间间隔,为保证控制的可靠性,一般在先进行1批次试喷,剩余目标控制量平均分配为2*n次控制实施,以保证偏心率小于0.003。
[0070]
在步骤s104中,每批次控制结束后进行控制效果评估与误差修正的目的是提高后续批次的控制精度和效率,圆满完成卫星的离轨控制任务。离轨控制一般考核的参数误差为半长轴误差,将角度偏置误差等因素造成的误差均考虑到基于半长轴的推力器效率因子
之中,工程实际证明该方法可行,推力器效率因子计算公式为:
[0071][0072]
式中,δar为实际的半长轴变化量(单位:千米),δag为目标半长轴控制量(单位:千米)。
[0073]
基于半长轴的推力器效率因子评估的控制参数调整流程为:
[0074]
控后轨道确定;
[0075]
计算控后半长轴的实际变化量,按公式(11)计算推力器效率因子;
[0076]
对本次控制的推力器效率进行评估,一般情况下,效率因子在(0.85,0.97]或[1.03,1.05]范围内为一般精度,(0.97,0.99]或[1.01,1.03]范围内为较高精度,(0.99,1.01)范围内为高精度;
[0077]
当控制精度为一般精度时,需对下一控制批次的推力器标定系数进行调整,调整方法为调整目标半长轴控制量,计算公式为δag=δa'g/k,式中,δag为目标半长轴控制量(单位:千米),δa'g为调整前目标半长轴控制量(单位:千米),k推力器效率因子。
[0078]
本技术适用于星上切向推力器异常需利用面外推力器进行离轨控制且星上剩余燃料较为充足的情况。
[0079]
在一个实施例中,所述利用星敏感器确定卫星离轨控制时间区间的过程包括:根据星敏感器的参量,计算太阳矢量位置,并得到所述太阳矢量位置与星敏光轴之间的相对夹角;根据所述太阳矢量位置与星敏光轴之间的相对夹角,确定星敏受杂散光干扰的时间段,从而确定卫星离轨控制时间区间。所述太阳矢量位置与星敏光轴之间的相对夹角包括:太阳面外夹角和太阳面内夹角。在一个实施例中,所述太阳面外夹角α<110
°
,且所述太阳面内夹角-30
°
<β<130
°
时,对应时间为所述星敏受杂散光干扰的时间段。
[0080]
具体的,向东位保前需进行偏航90
°
机动,为确保星敏正常工作,切向推力器工作时间区间如下:
[0081]
每年的3月10日—10月20日期间,工作时间为北京时间21:00到次日凌晨3:00期间;且需要避开阴影期。
[0082]
每年的10月20日到次年的3月10日期间,工作时间为北京时间17:00到次日凌晨3:00期间。
[0083]
进行法向控制不进行偏航姿态机动或小角度机动,为确保星敏正常工作,法向推力器工作时间区间如下:
[0084]
每年的3月10日至10月20日期间,工作时间为北京时间21:00到次日11:00期间;且需要避开阴影期。
[0085]
每年的10月20日到次年的3月10日期间,工作时间为全天。
[0086]
在一个实施例中,所述通过卫星的特性参数,确定卫星最小可使用剩余燃料量的过程包括:根据卫星的所述特性参数,采用pvt法计算推进剂剩余量,所述特性参数包括推进剂贮箱的压力和温度数据;根据所述推进剂剩余量,计算得到所述卫星最小可使用剩余燃料量。
[0087]
具体的,根据卫星推进剂贮箱的压力和温度数据,使用pvt法计算推进剂剩余量50千克,其理论计算误差按贮箱的1.9%,贮箱的挤出效率指标为99%,得出卫星最小可使用
的剩余燃料47.68千克。
[0088]
已知卫星质量为500千克,推力器比冲为2087.3牛/(千克/秒),可用剩余燃料为47.68千克,推力器推力为10牛,控制期间采用两个推力器同时喷气,计算出卫星可产生总速度增量约为199.05米/秒,总喷气时长约为4796.12秒。
[0089]
在一个实施例中,所述根据所述可用的速度增量、半长轴及卫星姿态偏置角,计算总半长轴控制量和总喷气时长的过程包括:根据切向半长轴目标控制量得到切向速度增量;根据所述切向速度增量得到离轨控制总速度增量及法向速度增量,并得到法向半长轴目标控制量;根据切向半长轴目标控制量和所述法向半长轴目标控制量得到总半长轴控制量,且根据所述离轨控制总速度增量得到所述总喷气时长。
[0090]
在一个实施例中,所述确定卫星离轨控制策略的过程包括:根据所述总半长轴控制量和所述总喷气时长,采用多次平均量机动控制加修正量机动控制相结合的控制方法。采用在远近地点处间隔12小时的时间间隔进行控制,先进行1批次试喷,再根据2*n次控制实施平均分配剩余目标控制量。
[0091]
具体的,根据总喷气时长的限制以及半长轴抬高量300千米的目标,设置卫星姿态偏置角为4度,考虑法向速度增量对半长轴计算实际半长轴变化量为323.64千米,总速度增量为156.79米/秒,控制策略设置为1批次试喷,剩余目标控制量平均分配为4次控制实施。具体控制策略见表1:
[0092]
表1某卫星离轨控制策略
[0093][0094]
在一个实施例中,所述计算推力器效率因子,并根据所述推力器效率因子对所述卫星离轨控制策略中的控制参数进行参数调整的过程包括:控后轨道确定,计算控后实际的半长轴变化量,并得到所述推力器效率因子;若所述效率因子在(0.85,0.97]或[1.03,1.05)范围内,则进行参数调整,所述参数包括推力器标定系数。通过调整目标半长轴控制量调整所述推力器标定系数。
[0095]
具体的,上述中的试喷气控制控后轨道确定结果表明,推力器的效率因子为1.13,综合考虑各种可能的偶然因素,第一批次离轨控制未进行误差修正,第一批次控制控后定轨结果表明,推力器的效率因子为1.15,考虑前两次的控制效率,将第二次控制的推力器标定系数修正为1.14,控后定轨结果表明,修正后推力器的效率因子为1.008,后续两批次控制均采用修正后的标定系数,推力器效率因子分别为1.05、1.001,控制过程具体参数如表2。
[0096]
表2某卫星离轨控制过程参数
[0097][0098]
通过上述通过姿态偏置利用面外推力器实现离轨控制方法,一方面,能够保证geo卫星离轨控制结束后,轨道高度位于同步带上方280千米以上、偏心率小于0.003,避免由于卫星偏心率过大造成卫星频繁穿越同步带的问题。另一方面,解决了卫星因切向推力器异常采用大角度姿态偏置进行面外推力离轨控制时,因星敏受杂散光影响,存在控制时间受限的问题。
[0099]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本公开的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。此外,本领域的技术人员可以将本说明书中描述的不同实施例或示例进行结合和组合。
[0100]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本公开的其它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由所附的权利要求指出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1