一种有人无人混编运输车队队列跟驰控制方法与流程
本发明涉及智能驾驶,尤其涉及一种有人无人混编运输车队队列跟驰控制方法。
背景技术:
1、公路运输是我国综合运输体系的重要组成部分,其作为“桥梁”有效地连接了社会发展的不同区域、产业和部门,有力的保障了社会经济活动的正常运行。根据运输任务性质的不同,公路运输分为民用公路运输和军用公路运输,它们同样都以运输车辆或由运输车辆组成的运输车队为载体。常规的运输车队采用货车司机驾驶运输车辆的方式,每辆车在运输车队中都是一个独立的个体,这种方式每辆货车都需单独配备货车司机,出于行驶安全考虑,对货车司机的身体素质、心理素质和应急反应能力等都有着极高的要求。常规运输车队面临的具体问题如下:
2、(1)车辆能耗高:由于货车司机都有各自的驾驶习惯,一些不良的驾驶习惯会造成车辆油耗的增加,而且车辆在道路上单独行驶时风阻系数较大,也造成了车辆油耗的增加。
3、(2)司机紧缺,且对司机有很高的综合素质要求:货运司机的工作环境大多比较艰苦,还具有一定的危险性,因此货车司机紧缺一直都是国内外普遍存在的问题,同时由于工作的特殊性,公路运输对货车司机的身体素质和心理素质都有很高的要求。
4、(3)事故率高:常规的运输车队以“人”为主体,人的主观经验固然重要,但人对应急事件的反应事件较长,同时由于货车司机的睡眠不足、疲劳驾驶和违章驾驶等问题,这些都是常规运输车队事故率高的原因。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种有人无人混编运输车队队列跟驰控制方法,用于解决常规公路货物运输车队面临的上述问题。
2、本发明提供了一种有人无人混编运输车队队列跟驰控制方法,所述车队队列中的车辆包括一个有人驾驶的引导车辆和若干无人驾驶的跟随车辆;
3、对于每一跟随车辆,所述跟驰控制方法包括:
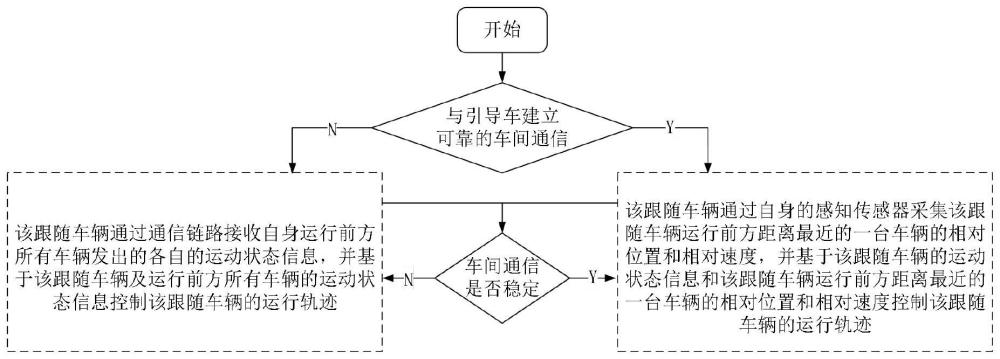
4、若该跟随车辆与其运行前方所有车辆之间的通信链路均正常,此时:该跟随车辆通过通信链路接收自身运行前方所有车辆发出的各自的运动状态信息,并基于该跟随车辆及运行前方所有车辆的运动状态信息控制该跟随车辆的运行轨迹;
5、若该跟随车辆与其运行前方车辆之间存在通信链路异常,此时:该跟随车辆通过自身的感知传感器采集该跟随车辆运行前方距离最近的一台车辆的相对位置和相对速度,并基于该跟随车辆的运动状态信息和该跟随车辆运行前方距离最近的一台车辆的相对位置和相对速度控制该跟随车辆的运行轨迹。
6、在上述方案的基础上,本发明还做出了如下改进:
7、进一步,所述运动状态信息包括绝对位置、绝对速度和加速度;
8、所述该跟随车辆及运行前方所有车辆的运动状态信息控制该跟随车辆的运行轨迹,包括:
9、根据该跟随车辆及运行前方所有车辆的运动状态信息,得到该跟随车辆的纵向控制量;
10、该跟随车辆的车辆控制器基于所述纵向控制量,控制该跟随车辆的纵向行驶。
11、进一步,根据跟随车辆与引导车辆之间的距离远近,对所有跟随车辆从1开始依次增序排列;
12、在根据该跟随车辆及运行前方所有车辆的运动状态信息得到的该跟随车辆的纵向控制量中,
13、第1辆跟随车辆的纵向控制量u1表示为:
14、u1=s0 (1)
15、当i>1时,第i辆跟随车辆的纵向控制量ui表示为:
16、
17、s0=ka0,i*(ai-a0)-kv0,i*(vi-v0)-kp0,i*(pi-p0+i*l)
18、sl=kal,i*(ai-al)-kvl,i*(vi-vl)-kpl,i*[pi-pl+(i-l)*l]
19、其中,ka0,i、kv0,i、kp0,i分别表示第i辆跟随车辆相对引导车辆的加速度控制系数、速度控制系数、位置控制系数;kal,i、kvl,i、kpl,i分别表示第i辆跟随车辆相对第l辆跟随车辆的加速度控制系数、速度控制系数、位置控制系数;ai、vi、pi分别表示第i辆跟随车辆的加速度、绝对速度、绝对位置;a0、v0、p0分别表示引导车辆的加速度、绝对速度、绝对位置;al、vl、pl分别表示第l辆跟随车辆的加速度、绝对速度、绝对位置,l表示所述车队队列中相邻两台车辆之间的相对距离参考值。
20、进一步,所述基于该跟随车辆的运动状态信息和该跟随车辆运行前方距离最近的一台车辆的相对位置和相对速度控制该跟随车辆的运行轨迹,包括:
21、基于该跟随车辆的绝对位置和绝对速度、以及该跟随车辆运行前方距离最近的一台车辆的相对位置和相对速度,得到该跟随车辆运行前方距离最近的一台车辆的运动状态信息;
22、根据该跟随车辆及其运行前方距离最近的一台车辆的运动状态信息,得到该跟随车辆的纵向控制量;
23、该跟随车辆的车辆控制器基于所述纵向控制量,控制该跟随车辆的纵向行驶。
24、进一步,在根据该跟随车辆及其运行前方距离最近的一台车辆的运动状态信息得到的该跟随车辆的纵向控制量中,
25、第1辆跟随车辆的纵向控制量u1′表示为:
26、u1′=s0 (3)
27、当i>1时,第i辆跟随车辆的纵向控制量ui′表示为:
28、ui′=si-1 (4)。
29、进一步,所述得到该跟随车辆运行前方距离最近的一台车辆的运动状态信息,包括:
30、以该跟随车辆的绝对位置为参考,对该跟随车辆运行前方距离最近的一台车辆的相对位置进行坐标转换,得到该跟随车辆运行前方距离最近的一台车辆的绝对位置;
31、以该跟随车辆的绝对速度为参考,对该跟随车辆运行前方距离最近的一台车辆的相对速度进行坐标转换,得到该跟随车辆运行前方距离最近的一台车辆的绝对速度;
32、基于该跟随车辆运行前方距离最近的一台车辆在相邻两个时刻的相对速度,得到该跟随车辆运行前方距离最近的一台车辆的加速度。
33、进一步,所述车队队列中的每一车辆均安装以下设备:
34、通信设备,用于实现当前车辆与车队中其他车辆之间的通信;
35、定位定向设备,用于实时检测当前车辆的运动状态信息;
36、感知传感器,用于实时检测当前车辆运行前方距离最近的一台车辆的相位位置和相对速度。
37、进一步,所述感知传感器,还用于实时检测当前车辆周边的障碍物、交通指示标识和道路线标识。
38、进一步,对于每一跟随车辆,所述跟驰控制方法还包括:
39、该跟随车辆基于自身实时检测当前车辆周边的障碍物、交通指示标识和道路线标识,得到该跟随车辆的横向控制量;
40、该跟随车辆的车辆控制器基于所述横向控制量,控制该跟随车辆的横向行驶。
41、所述车队队列的行驶限制条件包括:
42、不允许引导车辆和跟随车辆离开车队;
43、不允许非车队队列中的其他车辆加入车队队列;
44、不允许跟随车辆在行驶过程中交换位置。
45、与现有技术相比,本发明至少可实现如下有益效果之一:
46、本发明提供的有人无人混编运输车队队列跟驰控制方法,能够有效地解决常规公路货物运输车队面临的诸多问题,具体地:
47、(1)燃油经济性方面:跟随车辆采用无人驾驶的形式,采用智能算法控制油门和刹车,并做智能策略进行燃油经济性的优化,相比于有人驾驶,其加减速曲线更加平缓和科学,提升了燃油经济性。另一方面,有人无人混编运输车队采用列队跟驰的形式,相比于单车,相邻车辆之间的气动流场会发生变化,后车处于前车的尾流区域,减小了货运车辆的行驶阻力,有效提升了燃油经济性。
48、(2)司机短缺方面:有人无人混编运输车队中跟随车辆采用无人驾驶的形式,拜托了对人员的依赖,能够减少车队驾驶员的数量,减轻货车司机短缺的压力。
49、(3)交通安全方面:有人无人混编运输车队中跟随车辆采用无人驾驶的形式,避免了由于货车司机疲劳驾驶、违章驾驶等原因引发的交通事故,提升了行车安全和交通安全。同时,有人无人混编运输车队采用队列行驶,可以缩短行车间距,提高道路交通通行率,这也能相应地提升交通安全。
50、(4)工程落地方面:有人无人混编运输车队采用的是“有人驾驶领航+无人驾驶跟随”的形式,相比于无人驾驶,其引入了“人”在环路,突出了“人”在系统中的作用,属于有人驾驶和无人驾驶的折中方案,技术难度相比于无人驾驶较低,能够更快地实现项目落地。
51、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!