一种面向光电探测设备的目标跟踪控制方法与流程
1.本发明属于目标跟踪技术领域,具体涉及一种基于目标高阶运动信息估计及前馈的目标跟踪控制方法。
背景技术:
2.当前光电探测设备使役环境日益复杂、且待跟踪目标的机动性越来越高,光电探测设备的目标跟踪性能也随之被提出更高的要求。
3.光电探测设备通过跟踪控制系统来实现对目标的指向与跟踪,跟踪控制系统在控制结构上通常采用角位置+角速度的双闭环结构,其中角位置环是实现目标跟踪的主要单元,它以目标图像脱靶量作为被跟踪目标的角位置误差信号,通过反馈控制来确保目标的有效跟踪精度。
4.具体而言,高目标跟踪性能体现在下述两个方面:1)针对高机动目标,能达到优异的目标跟踪精度;2)针对运载体的动态载荷条件,能具有优异的扰动抑制能力。
5.然而,当前在光电探测系统中所广泛采用的目标跟踪技术很难兼顾上述两方面的问题。例如,传统的脱靶量反馈控制方法无法消除脱靶量延迟所导致的跟踪误差,这种滞后误差在高机动目标跟踪问题上显得尤为致命;速度前馈技术虽然能有效补偿脱靶量延迟带来的误差,但跟踪控制系统稳定性和抗扰能力并没有得到有效保证;基于smith预估体系的延时补偿技术虽然能有效提升控制系统稳定裕度,但却无法针对性地补偿脱靶量滞后导致的跟踪误差。
6.因此,亟需能有效补偿脱靶量延迟所导致的跟踪误差,同时能针对运载体动态环境造成的扰动具有较高抑制能力的目标跟踪控制方法。
技术实现要素:
7.为了兼顾高机动目标的高精度跟踪、以及高动态环境的高效率扰动抑制两方面需求,本发明提供一种基于目标高阶运动信息估计及前馈的目标跟踪控制方法。
8.本发明解决其技术问题所采用的技术方案是:一种面向光电探测设备的目标跟踪控制方法,包括如下步骤
9.步骤s1,高阶运动信息估计:根据光电探测设备所提供的多源测量信号,估计出被跟踪目标在地理系下相对光电探测设备的运动角位置、角速度以及角加速度等高阶运动信息;
10.根据光电探测设备所提供的滞后τ时刻的目标图像脱靶量e(t-τ)以及光电探测设备中表征光轴惯性姿态的角位置y(t),将二者时间轴对齐后经过坐标投影变换,得到在地理系σn下滞后τ时刻的目标角位置r(t-τ),用于重构跟踪控制系统的角度指令信号;
11.将目标角位置r(t-τ)作为卡尔曼滤波器的量测信号,经过卡尔曼滤波,估计出目标相对地理系σn的目标角速度和目标角加速度将目标角加速度估计值
做差分得到目标角加加速度估计值进行限幅得到稳定的目标角加速度估计值通过针对角加加速度这类高阶运动信息的判断,进一步保证角加速度的变化率既能适应被跟踪目标的机动性要求,同时避免目标跟踪时光轴频繁抖动而失稳,目标角速度估计值和经过限制变化率的目标角加速度估计值等高阶运动信息则用于后续的前馈控制;
12.步骤s2,前馈控制:根据获取到的目标运动信息,设计前馈控制器,实现对目标的高精度跟踪,同时增强控制系统抗扰能力;
13.通过角加加速度来判断角加速度是否超过阀值,进而对角加速度来限幅,根据滞后τ时刻目标角速度估计值和限幅后目标角加速度估计值通过公式得到当前时刻目标的运动角速度上式体现了在滞后τ时间内目标机动性导致的速度变化,因此这里获得的对有效补偿脱靶量滞后τ所导致的跟踪误差具有重要作用;
14.设计基于传递函数q=s+τsc
p
的前馈控制器,其中c
p
为跟踪控制系统的位置反馈控制器,s为拉普拉斯算子,将前馈控制器施加到速度前馈环节上,即可得到前馈控制器q所产生的控制量结合当前时刻目标的运动角速度就能实现基于目标高阶运动信息估计及前馈的目标跟踪控制。
15.进一步,所述步骤s1中的目标角位置r(t-τ)由如下步骤得到:
16.分别以σb、σe和σn为靶面系、两轴光电探测设备俯仰轴坐标系和地理系,θ
x
和θy为目标在靶面系σb上沿x和y轴的脱靶量,θe为光轴指向目标时的俯仰角,θn为光轴指向目标时的方位角,得到光轴在靶面系σb的矢量
[0017][0018]
根据靶面系σb投影到地理系σn的方向余弦阵得到光轴在地理系σn的矢量
[0019][0020]
得到目标相对地理系σn的高度角hn和方位角an[0021][0022]
上述坐标投影变换中方向余弦阵在每个采样时刻根据光电探测设备光轴在地理系σn下的姿态角y(t)进行更新,而光轴在地理系σn下的姿态角y(t)可通过设备中三轴陀螺或者惯导的姿态测量值来获取,由于目标图像脱靶量θ
x
和θy存在时间长度为τ的延时,
因此上式得到的目标相对地理系σn的高度角hn和方位角an也延时了时间τ,进一步将τ时刻前的高度角hn和方位角an统一到一维方向等效为目标在地理系σn下的角位置r(t-τ)。
[0023]
再进一步,所述步骤s1中的卡尔曼滤波器的状态方程采用匀加速运动模型:
[0024][0025]
或者机动目标当前“统计”模型
[0026][0027][0028]
式中的x2和x3即为目标在地理系σn下的目标角速度估计值和目标角加速度估计值
[0029]
再进一步,所述步骤s1对目标角加加速度估计值的幅值判断及限幅流程为:首先缓存上一时刻k-1的角加速度估计值式中nts=τ代表脱靶量延时,ts为采样时间;随后更新当前时刻k的角加速度估计值接着通过差分计算出目标角加加速度最后判断角加加速度的绝对值是否超出门限值若没有则结束本流程,若有则通过门限值得到限幅后的角加速度估计值
[0030]
更进一步,所述步骤s2中系统闭环传函为
[0031][0032]
本发明的有益效果是:
[0033]
本发明跟踪控制方法中运用了目标加速度来进一步精确表征脱靶量延时时间内的目标机动性,同时采取了对目标加加速度的限幅,目标的这些高阶运动信息的应用能够有效提升对目标,特别是高机动目标的跟踪性能。
[0034]
在跟踪控制系统中施加本发明的前馈控制器,能够有效提高控制系统的稳定裕度,使得位置反馈控制器增益能够进一步提高,进而有效增强跟踪控制系统的抗扰能力。
[0035]
本发明包含高阶运动信息估计和前馈控制两部分内容,其中高阶运动信息估计根据光电探测设备所提供的多源测量信号,估计出目标在地理系下相对光电探测设备的运动角位置,以及角速度、角加速度等高阶运动信息;前馈控制是根据获取到的目标运动信息,设计前馈控制器,实现对目标的高精度跟踪,同时增强控制系统抗扰能力。
附图说明
[0036]
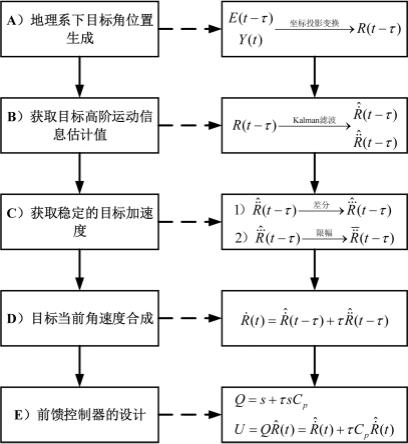
图1为本发明控制方法的流程图;
[0037]
图2为地理系下目标角位置坐标投影变换的典型示意图;
[0038]
图3为目标角加加速度的幅值判断及限幅流程图;
[0039]
图4为基于目标高阶运动信息估计及前馈下的完整跟踪控制系统框图。
具体实施方式
[0040]
结合附图和实施例对本发明作进一步的详细说明如下。
[0041]
本发明公开的一种基于目标高阶运动信息估计及前馈的目标跟踪方法的原理图如图1所示,包含高阶运动信息估计和前馈控制两部分内容。
[0042]
本发明方法根据目标在滞后τ时刻的高阶运动信息估计值和通过如下公式可得到当前时刻目标的运动角速度
[0043][0044]
上式体现了在滞后τ时刻内目标机动性导致的速度变化,因此这里获得的对有效补偿脱靶量滞后τ所导致的跟踪误差具有重要作用。
[0045]
设计前馈控制器的传递函数为
[0046]
q=s+τsc
p
ꢀꢀꢀ
(2)
[0047]
上式中c
p
为跟踪控制系统的位置控制器、s为拉普拉斯算子,并将前馈控制器施加到速度前馈环节上,即可以得到前馈控制量为
[0048][0049]
结合步骤d)得到的当前时刻目标的运动角速度就能实现基于目标高阶运动信息估计及前馈的目标跟踪控制。
[0050]
具体实施过程为:
[0051]
a,地理系下目标角位置生成。
[0052]
在t时刻下,根据目标图像脱靶量e(t-τ)、以及描述光电探测设备光轴在地理系σn下的姿态角y(t),通过坐标投影变换得到目标在地理系σn下的角位置r(t-τ)。
[0053]
以两轴光电探测设备为例,坐标投影变换示意图如图2所示。σb、σe和σn分别为靶面系、设备俯仰轴坐标系和地理系。θ
x
和θy为目标在靶面系σb上沿x和y轴的脱靶量,θe为光轴指向目标时的俯仰角,θn为光轴指向目标时的方位角。光轴在靶面系σb的矢量为
[0054][0055]
从靶面系σb投影到地理系σn的方向余弦阵为光轴在地理系σn的矢量为
[0056][0057]
因此,目标相对地理系σn的高度角hn和方位角an为
[0058][0059]
上述坐标投影变换中方向余弦阵在每个采样时刻根据光电探测设备光轴在地理系σn下的姿态角y(t)进行更新,而光轴在地理系σn下的姿态角y(t)可通过设备中三轴陀螺或者惯导的姿态测量值来获取。由于目标图像脱靶量θ
x
和θy存在时间长度为τ的延时,因此式(6)得到的目标相对地理系σn的高度角hn和方位角an也延时了时间τ。进一步将τ时刻前的高度角hn和方位角an统一到一维方向进行表达,即等效为目标在地理系σn下的角位置r(t-τ)。
[0060]
b)获取目标高阶运动信息估计值。将步骤a)中得到的目标在地理系σn下的角位置r(t-τ)作为卡尔曼滤波器的量测信号z1(k),通过卡尔曼滤波可得到目标在地理系σn下的运动角速度、角加速度的最优估计值和
[0061]
卡尔曼滤波器的状态方程可采用匀加速运动模型
[0062][0063]
或者机动目标当前“统计”模型
[0064][0065][0066]
式(7)或者(8)中的x2和x3即为目标在地理系σn下的运动角速度、角加速度的估计值和
[0067]
c)获取稳定的目标加速度。步骤b)中得到的目标角加速度由于滤波器的系
统噪声较大,其变化率可能远大于实际目标的机动性能,这种问题会导致目标跟踪时光轴频繁抖动而失稳。为此,将目标角加速度差分得到目标的角加加速度并通过对角加加速度进行限幅,进而得到稳定的目标角加速度估计值
[0068]
目标角加加速度的幅值判断及限幅流程如图3所示。图3中,目标角加加速度的幅值判断及限幅流程为:
[0069]
首先,缓存上一时刻k-1的角加速度值式中nts=τ,代表脱靶量延时,ts为采样时间;
[0070]
随后,更新当前时刻k的角加速度估计值
[0071]
接着,通过差分,计算出角加加速度
[0072]
最后,判断角加加速度的绝对值是否超出门限值若没有则结束本流程,若有,则通过门限值得到限幅后的角加速度估计值这里的即为本步骤的目标角加速度估计值的离散表达形式。
[0073]
d)目标当前速度合成。根据步骤b)和c)获取的目标在滞后τ时刻的高阶运动信息估计值和同时结合公式(1),可得到当前时刻目标的运动角速度通过本步骤得到的更好地表征出了在滞后τ时间内目标机动性导致的速度变化。
[0074]
e)前馈控制器的设计。上述步骤a)获取了目标在地理系σn下的角位置信息r(t-τ),用于重构跟踪控制系统的角度指令信号;而步骤b)和c)得到的目标角加速度估计值以及步骤d)得到的目标角速度等高阶运动信息则用于前馈控制。
[0075]
包含本发明所涉及的基于目标高阶运动信息估计及前馈的完整跟踪控制系统框图如图4所示。图4中e(t-τ)为目标图像脱靶量,是光电探测设备进行目标跟踪时唯一可依赖的目标运动信息,且该信号存在延时τ。本发明所涉及的步骤a)融合了目标图像脱靶量e(t-τ)以及表征光轴指向的惯性姿态角y(t),通过坐标投影变换,计算出了目标角位置r(t-τ)。本步骤所涉及的跟踪控制系统以目标角位置r(t-τ)为控制系统的等效指令信号,c
p
为位置反馈控制器,1/s为跟踪控制系统的被控模型,d(t)为光电探测设备受到的环境扰动。
[0076]
在图4的基础上,设计前馈控制器q=s+τsc
p
,前馈控制器q所产生的控制量为充分利用了本发明所涉及的步骤b)、c)和d)中获取的目标高阶运动信息估计值。此时系统闭环传函为
[0077][0078]
为进一步比较跟踪性能,给出传统脱靶量反馈下的系统闭环传函
[0079][0080]
对比式(9)和(10)可见:
[0081]
(1)、在本发明所设计的前馈控制器q下,系统位置响应(即光轴的惯性姿态角y(t))较好的跟踪了目标的角位置指令r,系统跟踪精度高于传统脱靶量反馈下的系统。
[0082]
(2)、在本发明所设计的前馈控制器q下,式(9)所示的闭环系统的特征方程为其中不包含严重制约系统稳定性的延时环节e-τs
,即控制系统的稳定裕度也相比传统脱靶量反馈下的系统得到了提升。
[0083]
另一方面,在本发明所设计的前馈控制器q下的跟踪控制系统的扰动抑制传函如式(11)所示,传统脱靶量反馈下的跟踪控制系统的扰动抑制传函如式(12)所示。
[0084][0085][0086]
对比式(11)和式(12)可见,在本发明所涉及技术下的闭环系统特征方程不包含严重制约系统稳定性的延时环节e-τs
,因此,该控制系统能设置更高的位置反馈控制器增益,进而体现更优的抗扰能力;而传统脱靶量反馈下的跟踪控制系统受到延时环节e-τs
的影响,其稳定裕度较低,这严重制约了系统的抗扰能力。由此可知,在本发明所涉及技术下,跟踪控制系统的抗扰能力也得到了提升。
[0087]
本发明利用目标图像脱靶量、陀螺积分值等多源测量信息,合成并估计出目标的高阶运动信息,同时据此进一步设计前馈控制器,整套控制方法在保证高精度跟踪性能的同时,提升了扰动抑制能力。
[0088]
发明实现了对被探测目标运动轨迹的合成,以及对目标角速度、角加速度等高阶运动信息的估计,并综合这些运动信息,提出了基于新的前馈控制器的目标跟踪控制方法,该方法具有较高的目标跟踪性能,同时,进一步提升了控制系统对扰动的抑制效果。
[0089]
本发明权利要求保护范围不限于上述实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1