基于欧式距离优化循迹规划的方法、机器人、存储介质与流程
本技术涉及人工智能领域,具体涉及一种基于欧式距离优化循迹规划的方法、机器人、存储介质。
背景技术:
1、机器人的行走路线遵循自动规划路径和已有的带约束性的预设路径。其中,机器人沿着预设路径行走,被称为循迹。机器人从初始点开始,到预设路径,再到目标点,所走过的路线被称为循迹路线。
2、现有的机器人从初始点到预设路径上的路径规划,常用的方法是,在预设路径上找到一点,使得机器人起点到预设路径上的距离最短,自动规划出起点到这一点的路径;目标点到预设路径采用同样的方法得到一条路径,将这三条路径拼接起来组合成一条完整的循迹路线。然而这样的方法并没有考虑到机器人的物理特性(例如轮廓大小、差分轮式、全向轮式)以及应用场景下条件约束。此外在循迹拼接处,机器人行走的平滑性丢失严重,请参阅图1(a)-(b),图1(a)-(b)是分别示出现有技术中两种常见循迹路线规划示意图,分别对应以下问题:
3、(a)拼接处需要旋转,即机器人从远处行驶到拼接点时,需要旋转到与预设路径平行,缺少顺畅性;
4、(b)先旋转,拼接处再次旋转,即机器人的目标点就在预设路径附近,且与预设路径朝向平行时,需要先旋转朝向预设路径,运动到拼接处时,再次旋转到与预设路线平行,使用行驶很不平滑。
技术实现思路
1、鉴于上述问题,本技术提供了一种基于欧式距离优化循迹规划的方法、机器人、存储介质,使循迹拼接处过度平滑,同时又能兼顾机器人的物理特性,进而保证机器人运行顺畅。
2、为实现上述目的,发明人提供了一种基于欧式距离优化循迹规划的方法,包括:
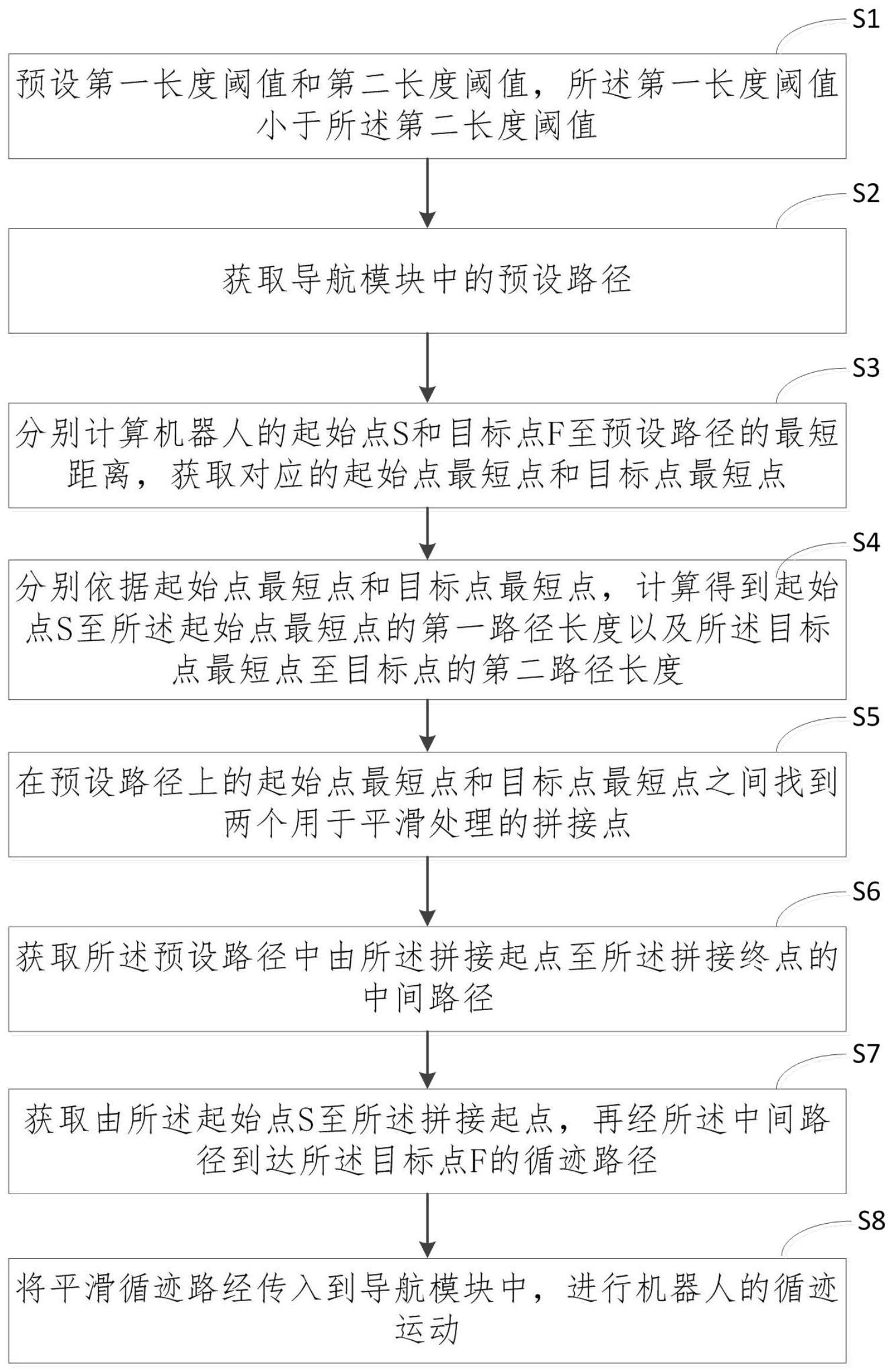
3、预设第一长度阈值和第二长度阈值,所述第一长度阈值小于所述第二长度阈值;
4、分别依据起始点最短点和目标点最短点,计算得到起始点至所述起始点最短点的第一路径长度以及所述目标点最短点至目标点的第二路径长度;
5、若所述第一路径长度/第二路径长度小于所述第一长度阈值,则由预设路径上的起始点最短点/目标点最短点开始依序计算相邻两两路径点之间的第一欧氏距离之和,获取所述第一欧式距离之和大于所述第二长度阈值时对应的两个路径点中的前一个路径点,得到拼接起点/拼接终点;
6、若所述第一路径长度/第二路径长度大于等于所述第一长度阈值,则由预设路径上的起始点最短点/目标点最短点开始依序计算各个路径点至所述起始点/所述目标点的第二欧式距离,获取所述第二欧式距离大于所述第二长度阈值时对应的路径点,得到拼接起点/拼接终点;
7、获取所述预设路径中由所述拼接起点至所述拼接终点的中间路径;
8、获取由所述起始点至所述拼接起点,再经所述中间路径到达所述目标点的循迹路径。
9、区别于现有技术,上述技术方案基于欧式距离对循迹规划进行了改进,分别依据起始点和目标点到预设路径的起始点最短点和目标点最短点之间的距离大小,对应使用圆圈法或者等长法在预设路径上找出拼接起点和拼接终点,使得机器人从起始点至预设路径,以及预设路径至目标点的拼接过度更加平滑,并且兼顾了机器人的物理特性,确保机器人运行路畅。
10、在一些实施例中,所述方法还包括:
11、分别计算机器人的起始点和目标点至预设路径的最短距离,获取对应的起始点最短点和目标点最短点。
12、在一些实施例中,所述计算得到起始点至所述起始点最短点的第一路径长度以及所述目标点最短点至目标点的第二路径长度,之后,还包括:
13、依据预设路径的运动正方向,顺序提取所述起始点最短点至所述目标点最短点之间的路径点,获取新预设路径rn={q0,q1,q2,...,qk},k=|t-f|+1,其中,t为所述起始点最短点对应预设路径的顺序标号,f为所述目标点最短点对应预设路径的顺序标号。
14、在一些实施例中,所述若所述第一路径长度/第二路径长度小于所述第一长度阈值,则由预设路径上的起始点最短点/目标点最短点开始依序计算相邻两两路径点之间的第一欧氏距离之和,获取所述第一欧式距离之和大于所述第二长度阈值时对应的两个路径点中的前一个路径点,得到拼接起点/拼接终点,包括:
15、若所述第一路径长度小于所述第一长度阈值,则由所述新预设路径rn的路径点q0开始,累计相邻两两路径点的第一欧式距离之和dd,所述第一欧式距离之和当所述第一欧式距离之和dd大于所述第二长度阈值,则停止求和,标记当前路径点qi为拼接起点qa;
16、若所述第二路径长度小于所述第一长度阈值,则由所述新预设路径rn的路径点qk开始,累计相邻两两路径点的第一欧式距离之和dd,所述第一欧式距离之和当所述第一欧式距离之和dd大于所述第二长度阈值,则停止求和,标记当前路径点qi为拼接终点qb。
17、在一些实施例中,所述若所述第一路径长度/第二路径长度大于等于所述第一长度阈值,则由预设路径上的起始点最短点/目标点最短点开始依序计算各个路径点至所述起始点/所述目标点的第二欧式距离,获取所述第二欧式距离大于所述第二长度阈值时对应的路径点,得到拼接起点/拼接终点,包括:
18、若所述第一路径长度大于等于所述第一长度阈值,则由所述新预设路径rn的路径点q0开始,依序计算各个路径点至所述起始点的第二欧式距离dt,所述第二欧式距离dt=||qi-ps||,i∈[0,k],其中,所述ps为起始点;当所述第二欧式距离dt大于所述第二长度阈值,则停止,标记当前路径点qi为拼接起点qa;
19、若所述第二路径长度大于等于所述第一长度阈值,则由所述新预设路径rn的路径点qk开始,依序计算各个路径点至所述目标点的第二欧式距离dt,所述第二欧式距离dt=||qi-pf||,i∈[k,0],其中,所述pf为目标点;当所述第二欧式距离dt大于所述第二长度阈值,则停止,标记当前路径点qi为拼接终点qb。
20、在一些实施例中,所述得到拼接起点和拼接终点,之后,还包括:
21、若所述拼接起点晚于所述拼接终点,则标记所述拼接起点和所述拼接终点均等于所述拼接起点和所述拼接终点的平均值。
22、在一些实施例中,所述获取由所述起始点至所述拼接起点,再经所述中间路径到达所述目标点的循迹路径,之后,还包括:
23、对所述循迹路径进行平滑处理,得到平滑循迹路径。
24、在这些实施例中,可见本技术的方法简单易行,贴合实际运用场景,能有效解决循迹拼接处不平滑的问题。
25、为实现上述目的,发明人提供了一种计算机可读存储介质,其上存储有计算机程序;所述计算机程序在被处理器执行时,能够实现上述一种基于欧式距离优化循迹规划的方法。
26、为实现上述目的,发明人提供了一种机器人,包括存储介质和处理器;所述存储介质上存储有计算机程序;所述计算机程序在被所述处理器执行时,能够实现上述一种基于欧式距离优化循迹规划的方法。
27、上述
技术实现要素:
相关记载仅是本技术技术方案的概述,为了让本领域普通技术人员能够更清楚地了解本技术的技术方案,进而可以依据说明书的文字及附图记载的内容予以实施,并且为了让本技术的上述目的及其它目的、特征和优点能够更易于理解,以下结合本技术的具体实施方式及附图进行说明。
- 还没有人留言评论。精彩留言会获得点赞!