一种采用视线角虚拟目标复合的飞行器光电导引着舰方法与流程
本发明涉及飞行器回收与位置控制领域,具体而言,涉及一种采用虚拟目标的光电制导方式的飞行器着陆导引方法。
背景技术:
1、光电导引实现飞行器着陆或者找舰回收具有安全可控可靠与精度高的优点,在近年来得到了国内外学者的广泛研究,也在工业飞行器中得到了广泛的应用。而常规的光电导引是通过测量飞行器相对着陆点或者着陆平台的位置以及角度来实现着陆的,如果着陆平台本身处于摇摆或者运动状态,或者飞行器初始位置相对着陆的较远时,采用常规pid控制着陆,容易出现指令过度,着陆过程颠簸起伏严重,导致飞行器受到损失,严重时甚至会受到剧烈撞击,出现安全事故。基于上述背景原因,本发明提出了一种基于虚拟目标的光电导引着陆方式,通过设置虚拟目标来减缓初始段的指令幅值,使得其着陆过程变得更容易控制,从而大大提高了着陆的品质,整个控制方案也有用角度微分信号的求解与引入而使得控制方案简单,物理意义明确,从而也使得本发明具有很高的工程应用价值。
2、需要说明的是,在上述背景技术部分发明的信息仅用于加强对本发明的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的目的在于提供一种采用视线角虚拟目标复合的飞行器光电导引着舰方法,进而克服了由于俯仰偏航通道下降过度过程阻尼不足而导致的飞行器导引平稳性不足的问题。
2、根据本发明的一个方面,提供一种采用视线角虚拟目标复合的飞行器光电导引着舰方法动,包括以下四个步骤:
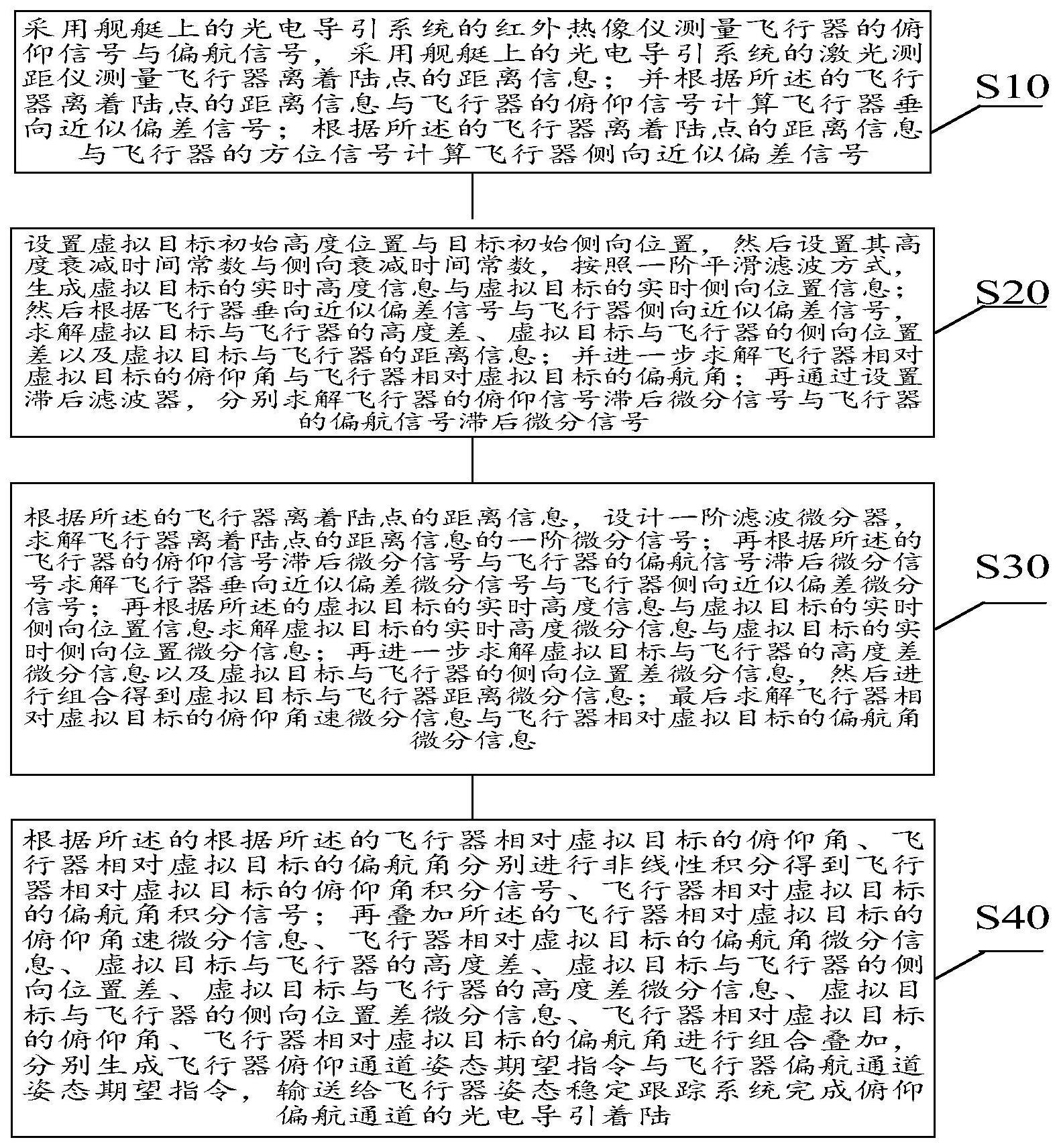
3、步骤s10,采用舰艇上的光电导引系统的红外热像仪测量飞行器的俯仰信号与偏航信号,采用舰艇上的光电导引系统的激光测距仪测量飞行器离着陆点的距离信息;并根据所述的飞行器离着陆点的距离信息与飞行器的俯仰信号计算飞行器垂向近似偏差信号;根据所述的飞行器离着陆点的距离信息与飞行器的方位信号计算飞行器侧向近似偏差信号如下:
4、ya=rsin(θ1);
5、za=rsin(θ2);
6、其中θ1为采用光电导引系统的红外热像仪测量飞行器的俯仰信号,θ2为采用光电导引系统的红外热像仪测量飞行器的偏航信号,r为采用舰艇上的光电导引系统的激光测距仪测量飞行器离着陆点的距离信息,ya为为飞行器垂向近似偏差信号;za为飞行器侧向近似偏差信号。
7、步骤s20,设置虚拟目标初始高度位置与目标初始侧向位置,然后设置其高度衰减时间常数与侧向衰减时间常数,按照一阶平滑滤波方式,生成虚拟目标的实时高度信息与虚拟目标的实时侧向位置信息;然后根据飞行器垂向近似偏差信号与飞行器侧向近似偏差信号,求解虚拟目标与飞行器的高度差、虚拟目标与飞行器的侧向位置差以及虚拟目标与飞行器的距离信息;并进一步求解飞行器相对虚拟目标的俯仰角与飞行器相对虚拟目标的偏航角;再通过设置滞后滤波器,分别求解飞行器的俯仰信号滞后微分信号与飞行器的偏航信号滞后微分信号。
8、步骤s30,根据所述的飞行器离着陆点的距离信息,设计一阶滤波微分器,求解飞行器离着陆点的距离信息的一阶微分信号;再根据所述的飞行器的俯仰信号滞后微分信号与飞行器的偏航信号滞后微分信号求解飞行器垂向近似偏差微分信号与飞行器侧向近似偏差微分信号;再根据所述的虚拟目标的实时高度信息与虚拟目标的实时侧向位置信息求解虚拟目标的实时高度微分信息与虚拟目标的实时侧向位置微分信息;再进一步求解虚拟目标与飞行器的高度差微分信息以及虚拟目标与飞行器的侧向位置差微分信息,然后进行组合得到虚拟目标与飞行器距离微分信息;最后求解飞行器相对虚拟目标的俯仰角速微分信息与飞行器相对虚拟目标的偏航角微分信息。
9、步骤s40,根据所述的根据所述的飞行器相对虚拟目标的俯仰角、飞行器相对虚拟目标的偏航角分别进行非线性积分得到飞行器相对虚拟目标的俯仰角积分信号、飞行器相对虚拟目标的偏航角积分信号;再叠加所述的飞行器相对虚拟目标的俯仰角速微分信息、飞行器相对虚拟目标的偏航角微分信息、虚拟目标与飞行器的高度差、虚拟目标与飞行器的侧向位置差、虚拟目标与飞行器的高度差微分信息、虚拟目标与飞行器的侧向位置差微分信息、飞行器相对虚拟目标的俯仰角、飞行器相对虚拟目标的偏航角进行组合叠加,分别生成飞行器俯仰通道姿态期望指令与飞行器偏航通道姿态期望指令,输送给飞行器姿态稳定跟踪系统完成俯仰偏航通道的光电导引着陆。
10、在本发明的一种示例实施例中,设置虚拟目标初始高度位置与目标初始侧向位置,然后设置其高度衰减时间常数与侧向衰减时间常数,按照一阶平滑滤波方式,生成虚拟目标的实时高度信息与虚拟目标的实时侧向位置信息;然后根据飞行器垂向近似偏差信号与飞行器侧向近似偏差信号,求解虚拟目标与飞行器的高度差、虚拟目标与飞行器的侧向位置差以及虚拟目标与飞行器的距离信息;并进一步求解飞行器相对虚拟目标的俯仰角与飞行器相对虚拟目标的偏航角;再通过设置滞后滤波器,分别求解飞行器的俯仰信号滞后微分信号与飞行器的偏航信号滞后微分信号包括:
11、
12、
13、δy=ya-yb;
14、δz=za-zb;
15、
16、
17、
18、
19、
20、θd1=(θ1-θ1a)/t1a;
21、θd2=(θ2θ2a)/t2a;
22、其中s为传递函数的微分算子;t1、t2为一阶平滑滤波的常值时间参数;y0为目标的初始高度位置;z0为目标的初始侧向位置;yb为虚拟目标的实时高度信息,zb为虚拟目标的实时侧向位置信息;其中δy为虚拟目标与飞行器的高度差;δz为虚拟目标与飞行器的侧向位置差;r为虚拟目标与飞行器的距离信息;其中θ1w为飞行器相对虚拟目标的俯仰角;θ2w飞行器相对虚拟目标的偏航角;其中t1a、t2a为滞后滤波器的常值时间参数;θ1a为飞行器的俯仰信号滞后信号;θ2a为飞行器的偏航信号滞后信号;θd1为飞行器的俯仰信号滞后微分信号;θd2为飞行器的偏航信号滞后微分信号;
23、在本发明的一种示例实施例中,根据所述的飞行器离着陆点的距离信息,设计一阶滤波微分器,求解飞行器离着陆点的距离信息的一阶微分信号;再根据所述的飞行器的俯仰信号滞后微分信号与飞行器的偏航信号滞后微分信号求解飞行器垂向近似偏差微分信号与飞行器侧向近似偏差微分信号包括:
24、
25、rd=(r-ra)/tr;
26、yad=rd sin(θ1)+rcos(θ1)θd1;
27、zad=rd sin(θ2)+rcos(θ2)θd2;
28、其中ra为飞行器离着陆点的距离信息的一阶滞后信号;tr为一阶滤波微分器的常值时间常数;rd为飞行器离着陆点的距离信息的一阶微分信号;yad为飞行器垂向近似偏差微分信号;zad为飞行器侧向近似偏差微分信号。
29、在本发明的一种示例实施例中,根据所述的虚拟目标的实时高度信息与虚拟目标的实时侧向位置信息求解虚拟目标的实时高度微分信息与虚拟目标的实时侧向位置微分信息;再进一步求解虚拟目标与飞行器的高度差微分信息以及虚拟目标与飞行器的侧向位置差微分信息,然后进行组合得到虚拟目标与飞行器距离微分信息;最后求解飞行器相对虚拟目标的俯仰角速微分信息与飞行器相对虚拟目标的偏航角微分信息包括:
30、ybd=(y0-yb)/t1;
31、zbd=(z0-zb)/t2;
32、δyd=yad-ybd;
33、δzd=zad-zbd;
34、
35、
36、
37、其中ybd为虚拟目标的实时高度微分信息,zbd虚拟目标的实时侧向位置微分信息;δyd为虚拟目标与飞行器的高度差微分信息,δzd为虚拟目标与飞行器的侧向位置差微分信息,rwd为虚拟目标与飞行器距离微分信息;θd1w为飞行器相对虚拟目标的俯仰角速微分信息,θd2w为飞行器相对虚拟目标的偏航角微分信息。
38、在本发明的一种示例实施例中根据所述的根据所述的飞行器相对虚拟目标的俯仰角、飞行器相对虚拟目标的偏航角分别进行非线性积分得到飞行器相对虚拟目标的俯仰角积分信号、飞行器相对虚拟目标的偏航角积分信号;再叠加所述的飞行器相对虚拟目标的俯仰角速微分信息、飞行器相对虚拟目标的偏航角微分信息、虚拟目标与飞行器的高度差、虚拟目标与飞行器的侧向位置差、虚拟目标与飞行器的高度差微分信息、虚拟目标与飞行器的侧向位置差微分信息、飞行器相对虚拟目标的俯仰角、飞行器相对虚拟目标的偏航角进行组合叠加,分别生成飞行器俯仰通道姿态期望指令与飞行器偏航通道姿态期望指令包括:
39、
40、
41、u1=k1δy+k2θ1w+k3δyd+k4θd1w+k5s1;
42、u2=d1δz+d2θ2w+d3δzd+d4θd2w+d5s2;
43、其中s1为飞行器相对虚拟目标的俯仰角积分信号,s2为飞行器相对虚拟目标的偏航角积分信号,k1、k2、k3、k4、k5、d1、d2、d3、d4、d5、l1、l2、ε0为常值控制参数,u1飞行器俯仰通道姿态期望指令,u2为飞行器偏航通道姿态期望指令。
44、有益效果
45、本发明一种采用视线角虚拟目标复合的飞行器光电导引着舰方法,其主要创新点有如下两点:其一是提出了虚拟目标的方式,使得飞行器的光电着陆回收过程的轨迹更加平滑安全可控。其二是提出了一种新的飞行器相对虚拟目标的俯仰角速微分以及飞行器相对虚拟目标的偏航角速微分的求解解算方法,该方法使得微分信号的解算更为精准,能够避免测量误差带来的不良影响,也使得整个飞行器光电导引的方式阻尼充足,最终的控制方案信号关系简单。
46、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
- 还没有人留言评论。精彩留言会获得点赞!