一种农田监测无人操控感应台装置的操作方法与流程
1.本发明涉及农田数据监测技术领域,尤其涉及一种农田监测无人操控感应台装置的操作方法。
背景技术:
2.农田监测主要为对农田的光照度、空气温度、空气湿度、土壤温度、土壤湿度另外还有如雨量、二氧化碳含量进行监测,其监测手段普遍是由多台搭载不同类型传感器的无人机分别在农田巡航,以对农田内的各项数据分类别进行监测,由于无人机数量多,每次对农田数据进行监测时,都需要人工分别将各种监测类型的无人机从收纳箱内拿出,监测完成后还需要人工将各种监测类型的无人机放入收纳箱,存在工作量大、操作繁琐,耗时长等问题。
3.鉴于上述原因,现研发一种农田监测无人操控感应台装置的操作方法。
技术实现要素:
4.本发明是为了克服现有技术的不足,提供一种农田监测无人操控感应台装置的操作方法,在对农田数据监测时,控制器能够通过推拉机构将壳体内的承载板依次推出壳体,以供无人机进行起飞,在无人机监测完成落在承载板上时,控制器能够通过推拉机构将降落有无人机的承载板依次拉入壳体内,以对无人机进行收纳,操作简单、方便,大幅减少了每次对农田数据监测的操作工序,有效的解决了每次对农田数据进行监测时,都需要人工分别将各种监测类型的无人机从收纳箱内拿出,监测完成后还需要人工将各种监测类型的无人机放入收纳箱,存在工作量大、操作繁琐,耗时长等问题。
5.本发明为了实现上述目的,采用如下技术方案:一种农田监测无人操控感应台装置的操作方法,所述的一种农田监测无人拖拉机感应台装置,是由:壳体、控制器、启动按钮、支撑板、承载板、缓冲弹簧、压力传感器、第一磁耦合导杆气缸、导磁块、第二磁耦合导杆气缸、推拉杆、电磁铁构成;方形的壳体的一侧设置控制器,壳体的前端和后端均设置为敞口,所述的控制器上设置启动按钮,所述的壳体的内部从上至下水平设置至少三个支撑板,每个支撑板均与壳体滑动连接,并沿壳体前后滑动,每个支撑板的上方均设置承载板,每个承载板与所对应的支撑板之间均设置缓冲弹簧和压力传感器,所述的壳体的后端分别设置推拉机构和升降机构,所述的升降机构通过移动体带动推拉机构上下移动,所述的推拉机构带动支撑板前后移动,所述的升降机构、推拉机构和压力传感器均与控制器电性连接。
6.所述的升降机构的结构为:所述的壳体的后端两侧竖向设置一对第一磁耦合导杆气缸,一对第一磁耦合导杆气缸的移动块之间设置推拉机构,每个第一磁耦合导杆气缸和推拉机构均与控制中心电性连接。
7.所述的推拉机构的结构为:所述的每个支撑板的后端中部均设置导磁块,所述的一对第一磁耦合导杆气缸的一对移动块之间横向设置一对第二磁耦合导杆气缸,一对第二磁耦合导杆气缸的相向端固定连接,一对第二磁耦合导杆气缸的一对移动块朝向壳体的一
侧横向设置一对推拉杆,一对推拉杆的外端与一对第二磁耦合导杆气缸的一对移动块铰接,一对推拉杆的内端之间设置电磁铁,一对推拉杆的内端与电磁块的后侧面两侧铰接,每个第二磁耦合导杆气缸和电磁铁均与控制中心电性连接。
8.使用时,将搭载不同类型传感器的无人机分别放置在不同的承载板上,对农田进行监测时,按下启动按钮,控制器工作,控制器控制一对第一磁耦合导杆气杠上的移动块带动一对第二磁耦合气缸上下移动,依次与从上到下不同的支撑板对应,在电磁铁与任一导磁块对应时,一对第二磁耦合导杆气缸上的一对移动块相向移动,通过推拉杆带动电磁铁向前推动对应的支撑板至推出壳体后,操控承载板上的无人机起飞巡检,一对第二磁耦合导杆气缸上的一对移动块反向移动至初始状态,如此循环往复,直至推出所有的支撑板。
9.对农田监测完成时:操控无人机降落在承载板上,压力传感器监测到压力时,控制器控制与该压力传感器对应支撑板上的电磁铁通电,一对第二磁耦合导杆气缸上的一对移动块相向移动,推拉杆带动电磁铁向前移动至电磁铁与导磁块互相贴合,电磁铁和导磁块通过磁力连接,控制对第二磁耦合导杆气缸上的一对移动块反向移动,一对推拉杆通过电磁铁和导磁块拉动对应的支撑板移至壳体内,控制电磁铁断电,如此循环往复,直至所有的支撑板移动至壳体内。
10.本发明的有益效果是:本发明结构简单、使用方便,在对农田数据监测时,控制器能够通过推拉机构将壳体内的承载板依次推出壳体,以供无人机进行起飞,在无人机监测完成落在承载板上时,控制器能够通过推拉机构将降落有无人机的承载板依次拉入壳体内,以对无人机进行收纳,操作简单、方便,大幅减少了每次对农田数据监测的操作工序,有效的解决了每次对农田数据进行监测时,都需要人工分别将各种监测类型的无人机从收纳箱内拿出,监测完成后还需要人工将各种监测类型的无人机放入收纳箱,存在工作量大、操作繁琐,耗时长等问题。
附图说明
11.下面结合附图对本发明作进一步说明:
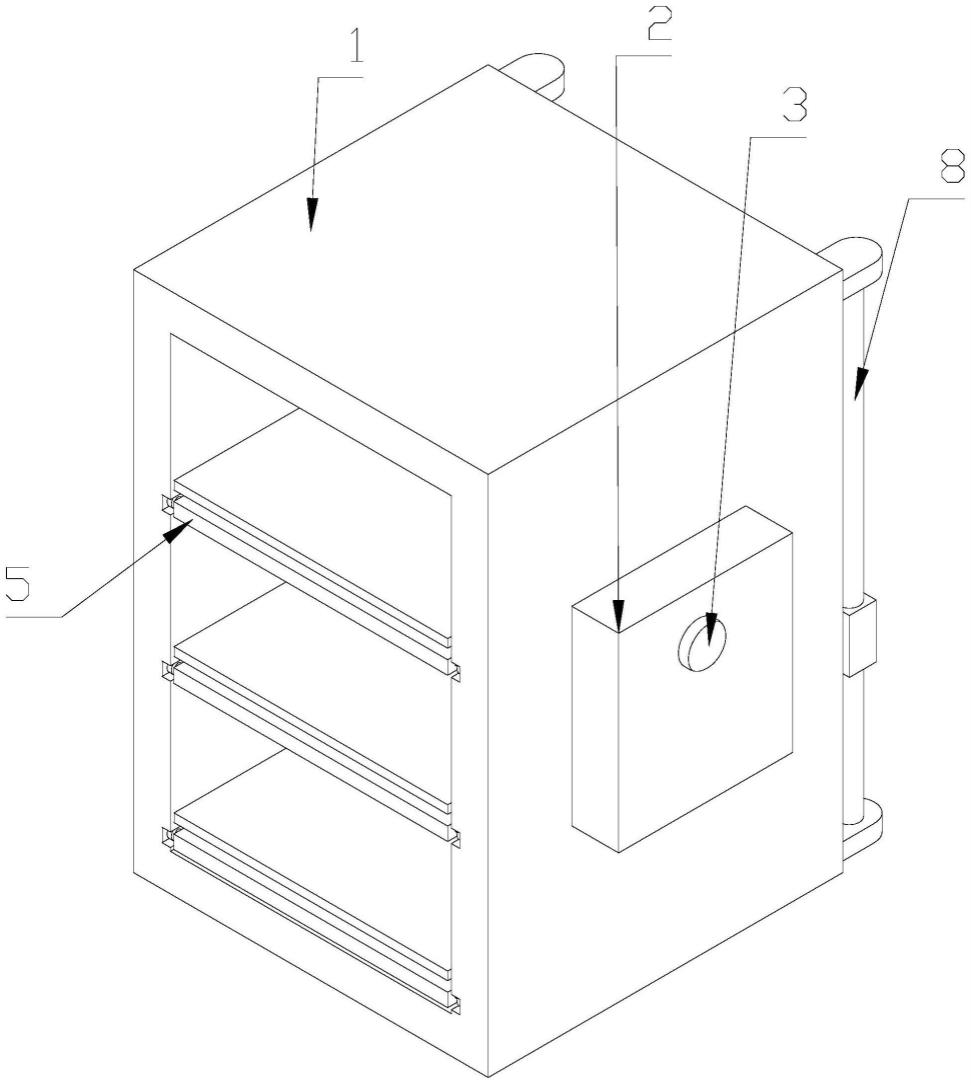
12.图1是本发明的第一立体结构示意图;
13.图2是本发明的第二立体结构示意图;
14.图3是图2中a处的放大机构示意图;
15.图4是本发明的前视结构示意图;
16.图中:壳体1、控制器2、启动按钮3、支撑板4、承载板5、缓冲弹簧6、压力传感器7、第一磁耦合导杆气缸8、导磁块9、第二磁耦合导杆气缸10、推拉杆11、电磁铁12。
具体实施方式
17.下面结合附图与具体实施方式对本发明作进一步详细说明:、
18.实施例1
19.方形的壳体1的一侧设置控制器2,壳体1的前端和后端均设置为敞口,所述的控制器2上设置启动按钮3,所述的壳体1的内部从上至下水平设置至少三个支撑板4,每个支撑板4均与壳体1滑动连接,并沿壳体1前后滑动,每个支撑板4的上方均设置承载板5,每个承载板5与所对应的支撑板4之间均设置缓冲弹簧6和压力传感器7,所述的壳体1的后端分别
设置推拉机构和升降机构,所述的升降机构通过移动体带动推拉机构上下移动,所述的推拉机构带动支撑板4前后移动,所述的升降机构、推拉机构和压力传感器7均与控制器2电性连接。
20.实施例2
21.所述的升降机构的结构为:所述的壳体1的后端两侧竖向设置一对第一磁耦合导杆气缸8,一对第一磁耦合导杆气缸8的移动块之间设置推拉机构,每个第一磁耦合导杆气缸8和推拉机构均与控制中心电性连接。
22.实施例3
23.所述的推拉机构的结构为:所述的每个支撑板4的后端中部均设置导磁块9,所述的一对第一磁耦合导杆气缸8的一对移动块之间横向设置一对第二磁耦合导杆气缸10,一对第二磁耦合导杆气缸10的相向端固定连接,一对第二磁耦合导杆气缸10的一对移动块朝向壳体1的一侧横向设置一对推拉杆11,一对推拉杆11的外端与一对第二磁耦合导杆气缸10的一对移动块铰接,一对推拉杆11的内端之间设置电磁铁12,一对推拉杆11的内端与电磁块的后侧面两侧铰接,每个第二磁耦合导杆气缸10和电磁铁12均与控制中心电性连接。
24.实施例4
25.使用时,将搭载不同类型传感器的无人机分别放置在不同的承载板5上,对农田进行监测时,按下启动按钮3,控制器2工作,控制器2控制一对第一磁耦合导杆气杠上的移动块带动一对第二磁耦合气缸上下移动,依次与从上到下不同的支撑板4对应,在电磁铁12与任一导磁块9对应时,一对第二磁耦合导杆气缸10上的一对移动块相向移动,通过推拉杆11带动电磁铁12向前推动对应的支撑板4至推出壳体1后,操控承载板5上的无人机起飞巡检,一对第二磁耦合导杆气缸10上的一对移动块反向移动至初始状态,如此循环往复,直至推出所有的支撑板4。
26.对农田监测完成时:操控无人机降落在承载板5上,压力传感器7监测到压力时,控制器2控制与该压力传感器7对应支撑板4上的电磁铁12通电,一对第二磁耦合导杆气缸10上的一对移动块相向移动,推拉杆11带动电磁铁12向前移动至电磁铁12与导磁块9互相贴合,电磁铁12和导磁块9通过磁力连接,控制对第二磁耦合导杆气缸10上的一对移动块反向移动,一对推拉杆11通过电磁铁12和导磁块9拉动对应的支撑板4移至壳体1内,控制电磁铁12断电,如此循环往复,直至所有的支撑板4移动至壳体1内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1