一种自动驾驶车辆的路径跟踪误差动力学模型优化方法
本发明涉及汽车控制,特别是涉及自动驾驶车辆的横向控制方法。
背景技术:
1、横向运动控制是自动驾驶技术的核心技术之一,根据上层决策规划lqr控制器的目标路径信息,输出相应的转向控制指令,控制车辆沿目标路径行驶。横向运动控制的效果不仅会影响车辆跟随目标路径的精度,还会影响车辆的整车的稳定型、舒适性。
2、目前,自动驾驶横向运动控制器的主流的控制策略有纯跟踪算法、pid控制、滑模控制、最优控制、模型预测控制等。其中,lqr控制器因其模型参数物理意义清晰、相对通用性较好,被广泛应用在自动驾驶横向运动控制领域。然而多数相关研究中,lqr控制器中的加权系数(即加权矩阵)并没有确切的解析方法,目前多数文献针对lqr控制器中的加权系数进行寻优主要是通过设定权值的方法将多目标优化转化为单目标优化,虽对多目标优化问题进行了简化,但是几乎无法设置与实际吻合的权值;而现有设计lqr控制器的过程中往往依赖设计者的主观经验试凑决定加权系数,在一定程度上限制了路径跟踪的精度与控制器自适应性。
技术实现思路
1、本发明提供一种自动驾驶车辆的路径跟踪误差动力学模型优化方法,用于提高车辆横向运动的路径跟踪精度以及改善控制器的自适应性。
2、为实现上述效果,本发明的技术方案如下:
3、一种自动驾驶车辆的路径跟踪误差动力学模型优化方法,应用于自动驾驶车辆,所述方法包括以下步骤:
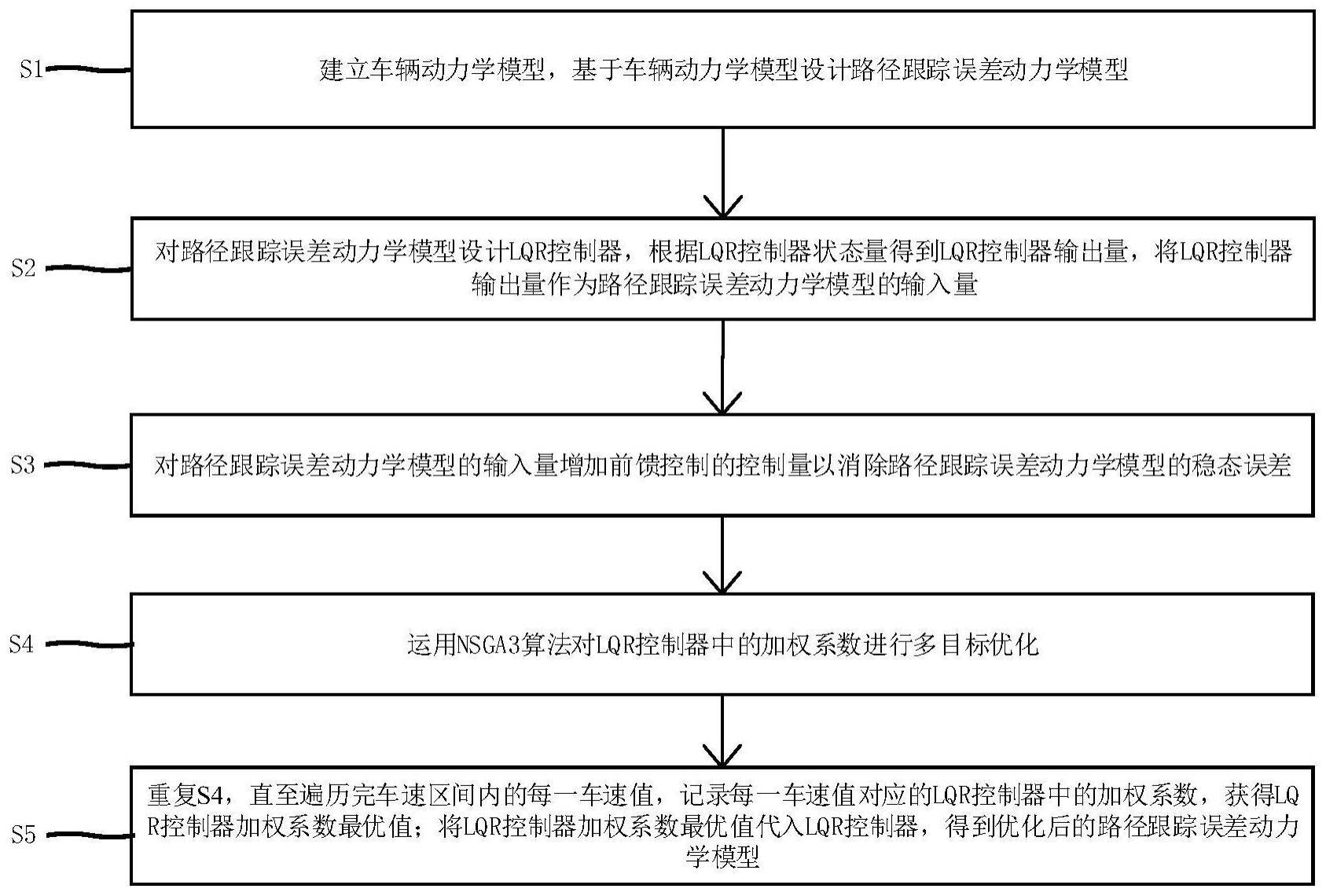
4、s1:建立车辆动力学模型,基于车辆动力学模型设计路径跟踪误差动力学模型;
5、s2:对路径跟踪误差动力学模型设计lqr控制器,根据lqr控制器状态量得到lqr控制器输出量,将lqr控制器输出量作为路径跟踪误差动力学模型的输入量;
6、s3:对路径跟踪误差动力学模型的输入量增加前馈控制的控制量以消除路径跟踪误差动力学模型的稳态误差;
7、s4:运用nsga3算法对lqr控制器中的加权系数进行多目标优化;
8、s5:重复s4,直至遍历完车速区间内的每一车速值,记录每一车速值对应的lqr控制器中的加权系数,获得lqr控制器加权系数最优值;将lqr控制器加权系数最优值代入lqr控制器,得到优化后的路径跟踪误差动力学模型。
9、进一步的,步骤s1建立车辆动力学模型具体为,根据车辆受力情况,建立车辆动力学模型,只考虑车辆横向和纵向受力情况,假设车辆前轴和后轴的两个车轮的转角与侧偏刚度相等,车辆后轮不进行转向,并且忽略空气阻力对车辆的影响,将车辆简化为二自由度单车模型;根据牛顿第二定律结合车辆前后轮受力情况有:
10、may=fyf cos(δ)+fyr (1)
11、式中,m为车辆的整车质量;ay为y轴加速度;fyf为车辆前轮侧偏力,fyr为车辆后轮侧偏力;
12、根据力矩平衡结合车辆前后轮受力得到受力点和车辆重心距离有:
13、
14、式中,i为车辆z轴转动惯量;φ为车辆的车轴与x轴的夹角,为车辆的车轴与x轴的夹角的二阶导数;δ为车辆前轮转角;b为车辆后悬架长度;
15、假设车辆前轮转角δ极小,cos(δ)≈1,则式(1)、(2)改写为:
16、may=cαfαf+cαrαr (3)
17、
18、式中,caf、cαr分别为车辆前轮、后轮侧偏刚度;af、ar分别为前轮、后轮侧滑角;a为车辆前悬架长度;
19、车辆y轴的加速度ay表示为:
20、
21、式中,表示车辆y轴方向速度的二阶导数,vx表示车辆x轴方向速度;为车辆的车轴与x轴的夹角的一阶导数;
22、前轮的侧滑角af、后轮的侧滑角ar分别表示为:
23、
24、
25、式中表示车辆y轴方向速度,将式(5)~(7)带入式(3)、(4)得到:
26、
27、
28、式中,为车辆的车轴与x轴的夹角的二阶导数;最终的车辆动力学模型为:
29、
30、即
31、式中,u=(δ),表示车辆前轮转角。
32、进一步的,骤s1设计路径跟踪误差动力学模型具体为,将车辆投影到自然坐标系下,建立以相对于期望路径的横向误差和航向误差为为状态变量的路径跟踪误差动力学模型;将车体坐标系投射到自然坐标下,将车辆控制解耦成横向控制和纵向控制,降低控制的复杂度;
33、设车辆的横向误差为d,航向误差为θ-θr,θ为航向角,θr为期望航向角,投影点速度大小为s,根据向量的关系可得横向误差d为:
34、
35、式中,为车辆速度v在自然坐标系下的投影法线方向;对式(11)求导可得:
36、
37、式中,为车辆实际位矢,为车辆投影位矢,表示如下;
38、
39、
40、式中,v表示车辆速度;τ为车辆速度v的方向,τr为车辆速度v在自然坐标系下的投影切线方向;将式(13)、(14)带入式(12)中,并且根据β为车辆速度v与x轴夹角;得:
41、
42、
43、同时将β、作为接近0的微小量,则式(15)改写为:
44、
45、令横向误差ed=d,则航向误差那么,
46、
47、
48、
49、
50、将式(17)~(20)与式(10)动力学模型联立得到路径跟踪误差动力学模型为:
51、
52、式中,
53、
54、进一步的,步骤s3具体为:在lqr控制器的基础上增加一个前馈控制的控制量δf以消除lqr控制器;加入前馈控制后得到路径跟踪误差动力学模型的输入量,为:
55、u(k)=-kerr(k)+δf (24)
56、将式(24)代入式(21)中,得到稳定后的err:
57、
58、式中,)为期望的道路曲率信息,曲率信息为和的比值;
59、将上式展开得:
60、
61、式中,k1、k3为lqr控制器反馈增益矩阵k中参数;横向误差ed的稳态误差通过前馈控制量消除,而航向误差的稳态误差无法消除;令前馈控制的控制量δf表示为:
62、
63、进一步的,步骤s4运用nsga3算法对lqr控制器中的加权系数进行多目标优化,具体为:将加权矩阵r中的元素设置为固定值,利用nsga3算法优化步骤s2中lqr控制器加权矩阵q中的加权系数q1、q2、q3、q4,实现对lqr控制器中的加权系数进行多目标优化,表述为:
64、
65、式中,l为nsga3算法的适应度函数。
66、进一步的,步骤s4中对lqr控制器中的加权系数进行多目标优化,具体为,
67、步骤s4.1:初始化种群:初始化nsga3算法的参数:最大迭代次数、种群大小、交叉概率、突变概率;根据lqr控制器加权系数q1、q2、q3、q4生成数量大小为n的初代种群pt,种群中的每个个体xi=(i=1,2,…n)都是一个决策变量,个体初始值设定为lqr控制器加权系数随机值;
68、步骤s4.2:种群非支配排序:种群中的个体根据相互间的支配关系分为若干层级,对所有种群个体进行归一化并将个体与参考点关联;
69、步骤s4.3:沿用传统遗传算子进行遗传:对种群进行选择、交叉、变异,生成种群大小为n的子代种群qt;
70、步骤s4.4:合并种群:对父代和子代种群进行合并,构成大小为2n的种群rt=pt∪qt,进行非支配排序、种群个体归一化并将个体与参考点关联,得到非支配排序结果;
71、步骤s4.5:精英保留策略:根据非支配排序结果从合并的种群rt中选择前n个个体作为父种群pt+1;
72、步骤s4.6:若gen不等于最大迭代数设定值,则gen=gen+1,并返回到步骤s4.3;若gen等于最大迭代数设定值,则终止迭代,输出最优pareto解;即当迭代次数等于设定值后,迭代后的带有n个个体的种群作为pareto最优解,构成一个最接近理论前沿面的实际前沿面。
73、进一步的,所述步骤s4.2种群非支配排序,具体包括:将种群非支配排序为若干不同的非支配层(f1,f2,…),逐次将各非支配层的解加入到新种群st中,直至新种群st的大小等于n,最后一个前沿假设为f1,若新种群st的大小等于n,则下一迭代初始种群pt+1=st,若新种群st的大小大于n,进行基于参考点的选择操作,标准化目标函数并创建参考集,构建种群个体与参考点之间的映射关系,映射关系为种群个体与参考点之间的距离关系,选择距离参考点最近的种群加入到新种群st中,直至新种群st的大小等于n。
74、进一步的,步骤s4.5种具体为:选择生成新的种群:选择前n个个体作为父种群pt+1,到第t代时,at为种群pt中的最优个体,父种群pt+1为新一代群体,若父种群pt+1中不存在比优个体at优的个体,则把优个体at加入到父种群pt+1中作为父种群pt+1的个体。
75、进一步的,步骤s5获得lqr控制器加权系数最优值具体为:重复步骤s4,遍历低、中、高速下的预设步长的车速值,每执行完一次步骤s4,获得一组pareto最优解,将pareto最优解作为lqr控制器加权系数最优值;并记录迭代结束后其中一组pareto最优解,直至遍历完车速区间内的每一车速值,记录每一车速值对应的lqr控制器中的加权系数,获得lqr控制器加权系数最优值。
76、需要说明的是,本发明公式中字母上的一点表示该字母量的一阶导数,两点则表示二阶导数。
77、pareto最优解为多组k值;每一车速下的pareto最优解,即lqr控制器的增益矩阵,不再需要nsga3去计算增益矩阵的值,pareto最优解提供给lqr控制器使用。
78、上述方案中,本发明以路径跟踪误差模型作为研究对象,设计lqr控制器,考虑道路期望的曲率信息,加入了前馈控制的控制量来消除lqr控制器的稳态误差;利用nsga3算法的全局搜索优化能力对lqr控制器的加权系数进行多目标寻优,提高lqr控制器控制器的设计效率,保证最优控制性能,为后续自动驾驶车辆横向控制策略提供了新思路。
79、与现有技术相比,本发明技术方案的有益效果是:
80、本发明在一般横向运动lqr控制器的基础上加入了前馈控制的控制量来消除路径跟踪误差动力学模型的稳态误差;利用nsga3算法的全局搜索能力,以车辆路径跟踪的横向误差和航向误差作为目标函数计算加权系数最优值,减小lqr控制器的复杂性,提高lqr控制器的精度,确保lqr控制器对目标路径具有较好的跟踪控制效果。
- 还没有人留言评论。精彩留言会获得点赞!