角度控制方法、装置、电子设备及存储介质与流程
本发明实施例涉及安全检测,尤其涉及一种角度控制方法、装置、电子设备及存储介质。
背景技术:
1、永磁同步电机由于其较高的可靠性、优异的控制性能、较小的扭矩波动等优点,已经被广泛的应用于汽车领域,在基于永磁同步电机的高性能矢量控制牵引传动系统中,尤其是新能源汽车中,控制单元需要实时准确地知道电机转子的位置信息和速度信息。而获取该信息最常用的方法是利用安装在电机上的位置传感器,如旋转变压器、光电编码器等。在新能源汽车中普遍使用旋转变压器进行电机转子位置和电机速度的获取。旋变装置的旋变初始角度就直接关系到永磁同步电机的输出扭矩是否合理,进而对永磁同步电机的控制效果产生重要影响。然而,位置传感器因为运行环境的影响,容易发生故障甚至失效,当旋变角度的偏差较大时,就会对电机的控制性能造成非常大的影响,在这种情况下很容易导致系统无法正常运行,严重时会损坏设备,造成生产事故。
2、由于旋转变压器和电机转子是同轴安装,运行时同步旋转,因此为了获取电机转子位置信息和速度信息,通常需要通过旋变进行检测。目前电机转子初始位置的获取方式,是在永磁同步电机生产的阶段对其进行标定,从而确定好旋变初始角的位置(旋变零位位置),再投入应用时是通过旋变位置的定位安装来保证精度。在永磁同步电机安装到新能源汽车上并投入到实际使用后,系统不会对旋变装置的输出结果进行检测。所以,一旦在生产阶段对旋变装置的旋变初始角度设置不合理、旋转变压器定位安装过程中出现偏差,或者运行环境对旋变位置偏差造成影响时,如果没有可行的检测方法预估出旋转变压器位置的零位偏差时,零位的偏差对电机控制效果会有极大的影响,严重时可能会导致事故的发生。
技术实现思路
1、鉴于此,为解决上述位置偏差角度存在偏差的技术问题,本发明实施例提供一种角度控制方法、装置、电子设备及存储介质。
2、第一方面,本发明实施例提供一种角度控制方法,包括:
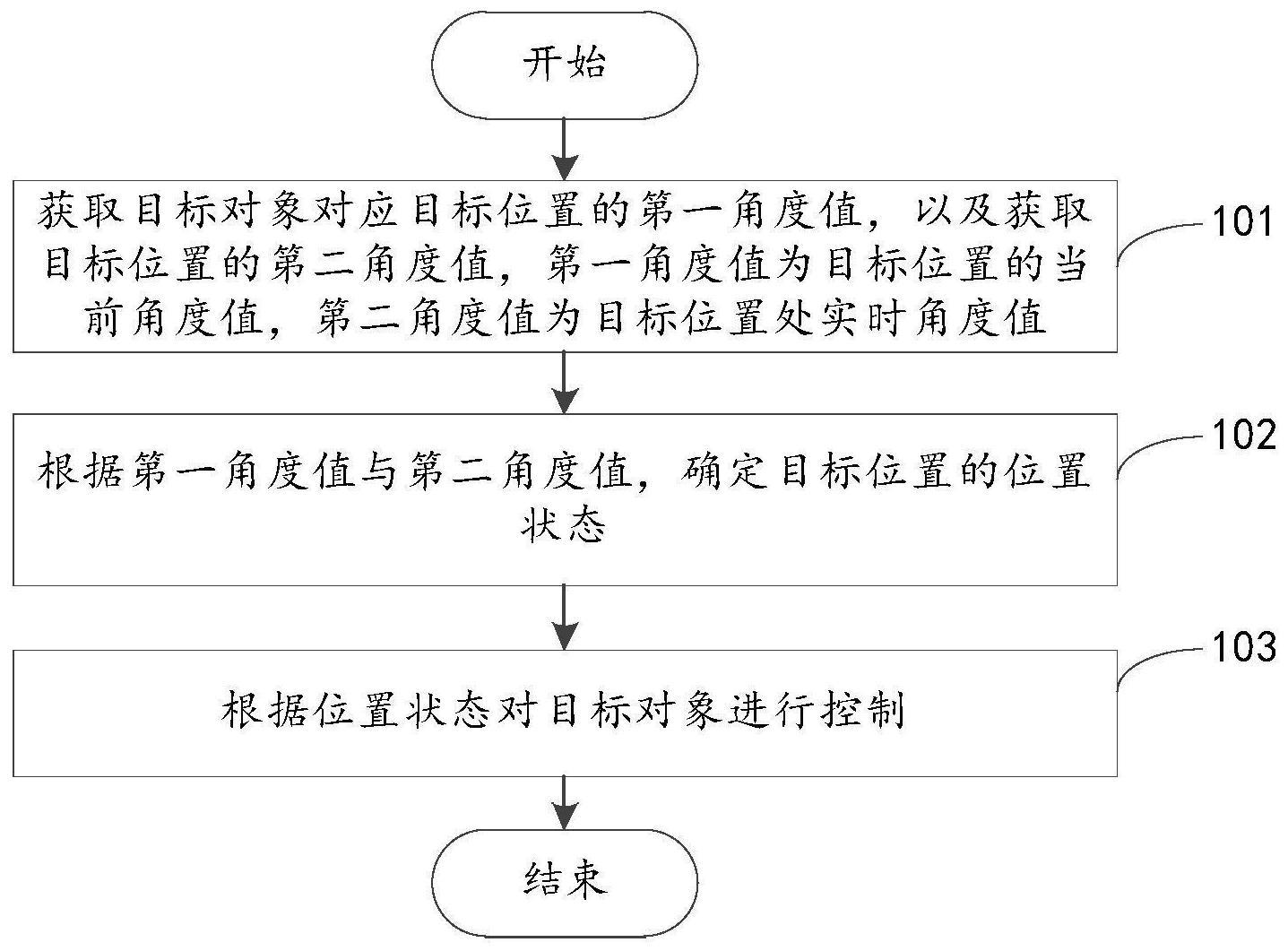
3、获取目标对象对应目标位置的第一角度值,以及获取所述目标位置的第二角度值,所述第一角度值为所述目标位置的当前角度值,所述第二角度值为所述目标位置处实时角度值;
4、根据所述第一角度值与所述第二角度值,确定所述目标位置的位置状态;
5、根据所述位置状态对所述目标对象进行控制。
6、在一个可能的实施方式中,所述获取目标对象对应目标位置的第一角度值,以及获取所述目标位置的第二角度值,包括:
7、获取由位置观测器检测的目标对象对应目标位置的第一角度值,以及获取由位置传感器检测的所述目标位置的第二角度值。
8、在一个可能的实施方式中,所述根据所述第一角度值与所述第二角度值,确定所述目标位置的位置状态,包括:
9、根据所述第一角度值与所述第二角度值的差值,得到所述目标位置的差度值;
10、将所述差度值与预先设定的第一阈值进行比较,得到比较结果;
11、根据所述比较结果确定所述目标位置的位置状态。
12、在一个可能的实施方式中,所述根据所述比较结果确定所述目标位置的位置状态,包括:
13、在所述比较结果为所述差度值大于等于所述第一阈值时,确定所述目标位置处于异常位置状态;
14、在所述比较结果为所述差度值小于所述第一阈值时,确定所述目标位置处于正常位置状态。
15、在一个可能的实施方式中,所述根据所述位置状态对所述目标对象进行控制,包括:
16、在所述目标位置处于异常位置状态时,控制所述目标对象触发第一警报提醒并作出停机处理;
17、在所述目标位置处于正常位置状态时,控制所述目标对象将所述目标位置的角度大小设置成所述第二角度值。
18、在一个可能的实施方式中,所述方法,还包括:
19、获取由所述位置传感器控制扭矩观测器检测的目标对象的第一扭矩值,以及获取由指令控制输出的第二扭矩值,所述第一扭矩值为当前扭矩值,所述第二扭矩值为实时检测得到的扭矩值;
20、根据所述第一扭矩值和所述第二扭矩值,确定所述目标对象的目标扭矩值;
21、利用所述目标扭矩值对所述目标对象进行控制。
22、在一个可能的实施方式中,所述根据所述第一扭矩值和所述第二扭矩值,确定所述目标对象的目标扭矩值,包括:
23、将所述第一扭矩值和所述第二扭矩值得到的差值与预先设定的第二阈值进行比较,确定所述目标对象的目标扭矩值;
24、当所述第一扭矩值和所述第二扭矩值得到的差值大于等于所述第二阈值时,确定所述目标扭矩值为零;
25、当所述第一扭矩值和所述第二扭矩值得到的差值小于所述第二阈值时,确定所述目标扭矩值为第一扭矩值。
26、在一个可能的实施方式中,所述利用所述目标扭矩值对所述目标对象进行控制,包括:
27、利用所述目标扭矩值为零,控制所述目标对象触发第二警报提醒;
28、利用所述目标扭矩值为所述第一扭矩值,控制所述目标对象保持正常运行状态。
29、第二方面,本发明实施例提供一种角度控制装置,基于检测方法,包括:
30、位置观测模块、位置传感器模块和故障检测模块;
31、所述位置观测模块被配置为:根据目标对象提供的电流,检测输出目标位置的第一角度值;
32、所述位置传感器模块被配置为:根据所述目标对象提供的控制指令,输出目标位置的第二角度值;
33、所述故障检测模块被配置为:根据所述位置观测模块输入的第一角度值以及所述位置传感器模块输入的第二角度值,进行故障检测处理,输出目标位置的角度值,利用所述目标位置的角度值为目标对象提供准确角度值。
34、在一个可能的实施方式中,所述装置还包括:
35、扭矩观测模块和扭矩偏差模块;
36、所述扭矩观测模块被配置为:接收所述位置传感器模块输出的扭矩检测指令,输出所述目标对象的第一扭矩值;
37、所述扭矩偏差模块被配置为:根据所述指令控制输入的第一扭矩值,以及所述扭矩观测模块输入的第二扭矩值,进行扭矩偏差处理,输出目标扭矩值,以使所述扭矩偏差模块为交流信号提供准确扭矩值。
38、第三方面,本发明实施例提供一种汽车电机,包括:处理器和存储器,所述处理器用于执行所述存储器中存储的角度控制程序,以实现第一方面中任一所述的角度控制方法。
39、本发明实施例提供的角度控制方案,通过获取目标对象对应目标位置的第一角度值,以及获取所述目标位置的第二角度值,所述第一角度值为所述目标位置的当前角度值,所述第二角度值为所述目标位置处实时角度值;根据所述第一角度值与所述第二角度值,确定所述目标位置的位置状态;根据所述位置状态对所述目标对象进行控制。通过获取目标对象对应目标位置的两个不同位置或状态的角度值,根据两个角度值的比较,可以确定当前目标对象对应的目标位置的角度值是否存在异常,并对目标对象进行控制;由本方案,可以实现设备位置角的精确检测和控制,以及提高设备安全性的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!