权重可调的多无人机编队控制方法及控制器与流程
本发明属于多无人机编队控制,涉及一种权重可调的多无人机编队控制方法及控制器,该方法适用于抗环境干扰的多机编队控制。
背景技术:
1、无人机编队在实际的飞行过程中,会存在风、流场等外部干扰,导致无人机无法保持设定队形。尤其是当长机进行机动时,需要僚机保持期望的距离、角度和速度来跟随长机运动。因此为保持编队队形稳定,对编队控制方法提出了更高的要求。然而在无人机编队在受外部风干扰的同时还会存在无人机模型耦合的问题。
2、目前自抗扰控制广泛应用于无人机控制领域,其在抑制扰动的同时还能解决模型耦合造成的建模复杂性问题。然而自抗扰控制方法均用于单机控制领域,未见在多无人机编队控制中应用。在多机控制领域,常用的是一致性编队控制方法,然而一致性编队控制方法却无法有效抑制干扰带来的影响。因此,如何实现多机抗干扰编队控制是亟待解决的技术问题。此外,如果想到将自抗扰与一致性编队控制结合,如何进行结合将存在难度,并且多无人机编队的过程中,对于一致性控制和自抗扰控制的需求量是不同的,如何平衡两者的权重也是应当考虑的问题。
技术实现思路
1、本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。
2、为此,本发明提供了一种权重可调的多无人机编队控制方法及控制器。
3、本发明的技术解决方案如下:
4、根据一方面,提供一种权重可调的多无人机编队控制方法,该控制方法包括:
5、以期望编队位置作为输入,基于自抗扰控制获取任意一架无人机的加速度控制量uadrci和对应的无人机状态,所述无人机状态包括无人机位置和速度;
6、将任意单架无人机自抗扰控制输出的位置和速度信息作为输入量,基于预设的一致性控制协议得到对应的保持期望编队队形需要的期望加速度控制量uconi;
7、将自抗扰中的加速度量uadrci与一致性编队中加速度控制量uconi分别取权值q1、q2并采用下式得到控制量ui:
8、ui=q1uadrci+q2uconi;
9、q1+q2=1;
10、将控制量ui作为无人机动力学模型中的实际控制量以实现对对应无人机的控制;
11、其中,基于人工势场思想的控制权重q1、q2调节。
12、进一步地,所述基于人工势场思想的控制权重q1、q2调节,包括:
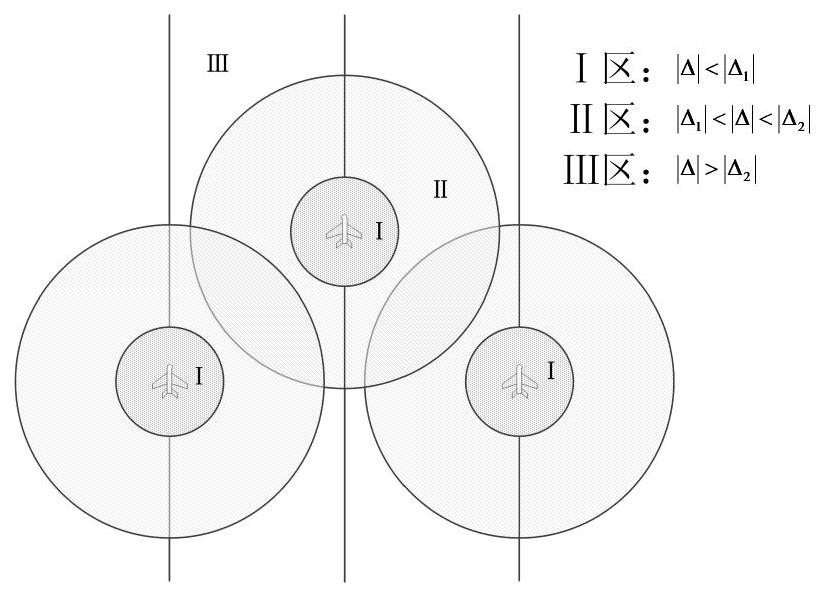
13、以无人机实际位置为圆心,构建两个同心圆,两个同心圆的两个半径分别为δ1和δ2,δ1为翼展的1.5倍,δ2为翼展的3倍,通过两个不同半径的圆将无人机周边区域划分为三类,其中:
14、当δ的绝对值小于δ1时构成区域ⅰ,增加无人机对应权重值q1;
15、当δ的绝对值大于δ1但小于δ2时构成区域ⅱ,增加无人机对应权重值q2;并通过引力和斥力函数调节对所述权重值q2进行自适应调节;
16、若δ的绝对值大于δ2构成区域ⅲ,若第i架无人机处于该区域则判断该架机无法完成编队任务,将该无人机剔除通讯网络;
17、其中,δ为某无人机实际位置与期望位置之间的距离。
18、进一步地,通过下述方式通过引力和斥力函数调节一致性作用力在控制方法中的比重:
19、定义在区域ⅱ中的引力势和斥力势分别如公式(3)和(4)所示。
20、
21、
22、其中,aij是无人机通讯拓扑中从第j架无人机到第i架无人机的信息流权重,k是正常数用来调节引力势的大小,eij表示第i架机与第j架机间的的实际距离与期望距离的差值,b和c为可调常数,分别代表斥力势的幅值和变化速度,‖eij||min是上述势场在无人机间作用的最小距离;
23、通过所述引力势和斥力势获取一致性控制权重的调节函数,如下式所示
24、
25、取c=b=1,则此时有:
26、
27、通过调节函数的一致性控制权重实现不同情况下一致性占比的调节。
28、进一步地,所述方法还包括:在控制量ui基础上,将受控后的无人机状态作为一致性控制和自抗扰控制的状态输入以形成闭环控制。
29、进一步地,通过下式方式以期望编队位置作为输入,基于自抗扰控制获取任意一架无人机的加速度控制量uadrci:
30、对第i架无人机与长机间的距离误差ei求二阶导数;
31、基于第i架无人机的动力学模型和所述二阶导数获取二阶误差方程;
32、根据二阶误差方程设计二阶自抗扰控制器;
33、以期望编队位置作为输入,基于所述二阶自抗扰控制器获取加速度控制量uadrci。
34、进一步地,通过下述方式获取第i架无人机与长机间的距离误差:
35、1)获取第i架无人机和长机之间的实际距离;
36、2)第i架无人机与长机之间期望距离转换到惯性坐标系下;
37、3)步骤1)得到的实际距离与步骤2)得到的距离作差得到距离误差ei。
38、进一步地,通过下式获得二阶误差方程:
39、
40、其中,bi为前项系数矩阵为bi=diag(cosγicosxi,cosxi,cosγi),为包含外界干扰和系统内部耦合的“总扰动”,γi为第i架无人机的航迹倾角,xi,yi,zi为第i架无人机在惯性坐标系下的三维位置信息,ωi为外界干扰量,系统输出yi为第i架无人机与长机间的距离误差。
41、进一步地,通过下式设计一致性协议:
42、
43、其中,uconi为一致性控制下第i架无人机的加速度值,k1,k2均为控制参数,aij是无人机通讯拓扑中从第j架无人机到第i架无人机的信息流权重,ai1表示与长机的邻接权重,ζ1为长机速度,ζi,ζj分别为第i架无人机和第j架无人机的速度,ei为第i架无人机与长机间的距离误差,ej为第j架无人机与长机间的距离误差,e1取为0。
44、根据一方面,提供一种结合自抗扰的多无人机编队控制器,所述编队控制器包括二阶自抗扰控制器和一致性控制系统,所述二阶自抗扰控制器用于获取任意一架无人机的加速度控制量uadrci和和对应的无人机状态,所述一致性控制系统根据所述二阶自抗扰控制器获取的无人机状态和预设的一致性控制协议获取保持期望编队队形需要的期望加速度控制量uconi,所述编队控制器还将自抗扰中的加速度量uadrci与一致性编队中加速度控制量uconi分别取权值q1、q2并采用下式得到控制量ui:
45、ui=q1uadrci+q2uconi;
46、q1+q2=1。
47、根据再一方面,提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任一所述方法。
48、上述技术方案基于长-僚机结构提出一种以无人机加速度为控制量,在一致性编队控制中引入自抗扰控制,将自抗扰控制和一致性编队相结合,并对两种控制方法的连接权重进行设计,具体通过引入人工势场的思想将自抗扰控制和一致性控制有效的结合,实现了依据区域自动调节的抗干扰编队控制,有效提升了无人机编队系统的稳定性和快速性。
- 还没有人留言评论。精彩留言会获得点赞!