一种基于集成学习的中远距作战飞行器轨迹预测方法与流程
本发明涉及一种基于集成学习的中远距作战飞行器轨迹预测方法,属于中远距作战状态预测与意图识别。
背景技术:
1、在现代中远距空战中,战场态势瞬息万变,导致空战环境具备高复杂、强动态等不确定性,对敌机目标的状态评估、飞行器预测和意图识别是我方做机动态势决策的关键部分,在指挥控制系统中发挥着至关重要的作用,是夺取制空胜利的重要支撑。在超视距1v1作战、有/无人编队协同空战等任务中,对敌方目标态势的精准预测,快速有效的空战决策方法尤为重要。本文将超视距空战决策过程建模成部分可观马尔科夫决策问题,并基于超视距空战态势评估中的非参量法设计回报模型,通过预测敌方飞行器来袭态势情况,为决策过程中的马尔科夫过程提供先验支持。传统的敌方目标意图识别的方法主要有模板匹配、专家系统、贝叶斯网络等方法。这些方法需要大量的领域专家知识对特征状态的权重、先验概率等进行量化,明确特征状态与意图之间的对应关系。然而,基于有限的领域专家知识得到的模型方法泛化能力较差,难以适应日益复杂的空战场景和多样的空战任务。在领域专家知识不足条件下,神经网络可以通过自身训练得到特征状态与意图之间的规则,克服了对大量领域专家知识的依赖。近年来,一些深度学习算法已被应用于敌机目标的作战意图识别,但在时间特征学习方面尚未完善,因此有待进一步的发展。
技术实现思路
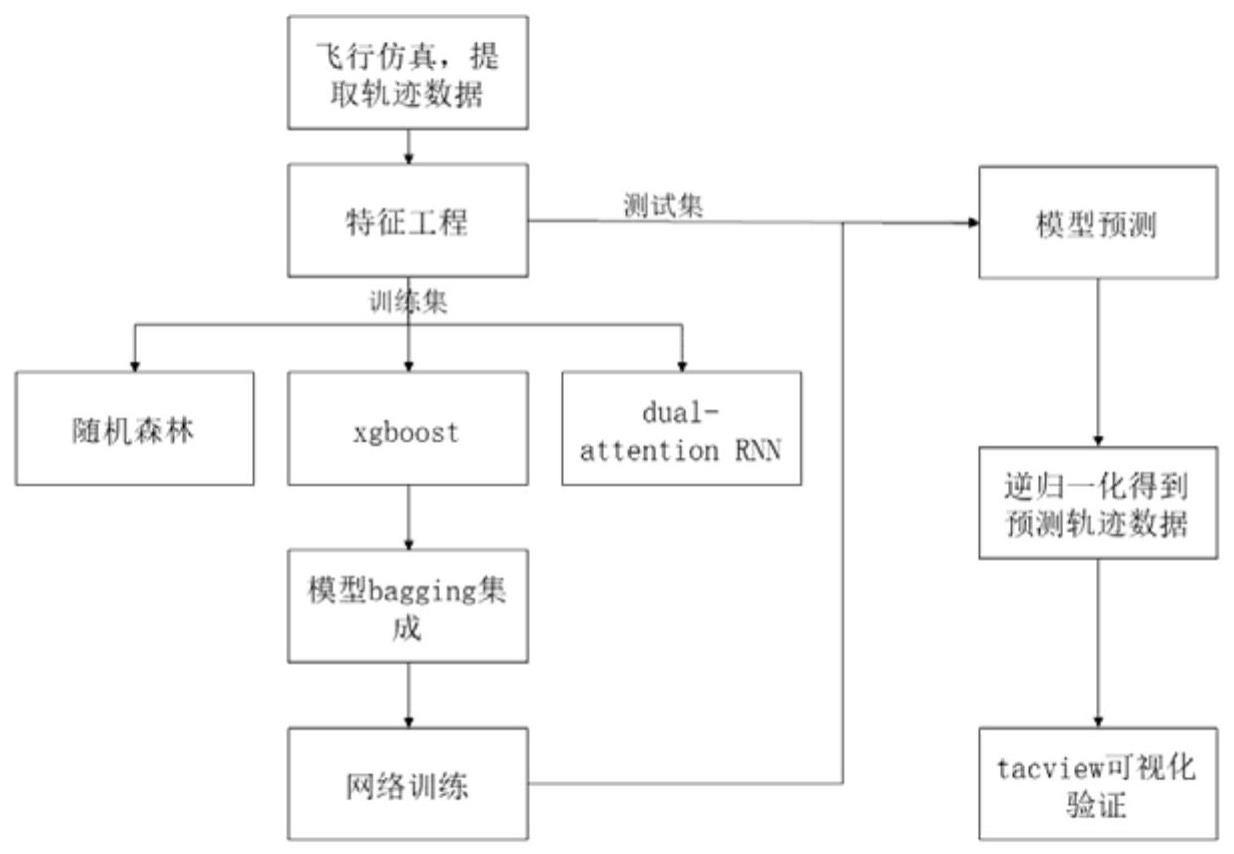
1、本发明的目的:为解决现有技术存在的问题,本发明提供一种基于集成学习的中远距作战飞行器轨迹预测方法,分为状态预测部分和三维可视化部分,主要包括飞行数据仿真,特征工程搭建,以及轨迹预测集成模型的建立。其中,轨迹预测集成模型是通过对随机森林、xgboost的机器学习模型和dual-attention rnn的神经网络模型三种模型,利用bagging集成思想融合得到的,三种方法的能够自适应地跟踪和预测飞行器的飞行轨迹,提高了轨迹预测在经纬高、滚转量的准确度。
2、本发明技术方案:一种基于集成学习的中远距作战飞行器轨迹预测方法,其特征在于,包括以下步骤:
3、步骤a:飞行数据仿真:在仿真环境模拟器中进行空空飞行器飞行仿真,并提取飞行数据构成数据集;
4、步骤b:搭建特征工程:首先需要对飞行仿真数据进行预处理,并采用相关系数法进行特征筛选,并进行归一化处理;其次,将归一化处理后的数据集按照比例划分为训练集和测试集数据集将训练数据输入模型;
5、步骤c:建立轨迹预测集成模型,包括随机森林、xgboost的机器学习模型和dual-attention rnn的神经网络模型,并利用bagging集成思想进行模型自适应融合,进行轨迹预测;
6、步骤d:利用mseloss作为预测值与真实值的误差损失函数,判断网络损失函数值l是否趋于不变,是则结束对深度学习神经网络的训练,否则继续训练;训练结束后,对飞行轨迹预测结果反归一化,并在tacview中进行可视化验证。
7、所述仿真环境模拟器可以自行搭建,也可基于tacview环境实现。
8、所述步骤b搭建特征工程具体为:
9、步骤b1:对飞行数据的完整性进行检查,剔除显著异常值,包括剔除缺失值、null
10、值;
11、步骤b2:去除明显不符合正态分布的特征;
12、步骤b3:进行特征相关性分析,去掉强相关的特征;
13、步骤b4:采用min-max对特征指标数据进行标准化归一至[0,1],并将训练集和测试集按照7:3的比例划分。
14、所述训练集用于模型的训练,测试集用于测试训练得到的模型的性能。
15、所述步骤c中,建立模型包括:
16、步骤c1:将飞行数据以滑窗的方式取模型输入值和真实值:
17、步骤c2:构造随机森林模型训练:随机森林时利用多棵决策树对样本进行训练并预测的一种算法;
18、步骤c3:构造xgboost模型训练,以迭代方式构建非常短且简单的决策树;
19、步骤c4:构造dual-attention rnn模型,提出了两级的attention机制;
20、步骤c5:三种模型bagging融合。
21、所述步骤c2具体为:
22、步骤c2.1:如果训练样本中有n个样本,那么从这n个样本中有放回的抽样n次,将得到的样本用于建树;
23、步骤c2.2:设m为输入样本的特征数,对于每个节点分裂时,我们先从这m个特征中选择m(m<<m)个特征,然后再在这m个特征中选择最佳的分裂点进行分裂;
24、步骤c2.3:每棵树都尽可能的生长,没有剪枝。
25、所述步骤c3构造xgboost模型训练具体为:
26、步骤c3.1:首先创建一个本身性能很差的简单树;
27、步骤c3.2:然后构建另一棵树,该树被训练来预测第一棵树无法预测的内容,并且它本身也是一个弱学习器;
28、步骤c3.3:继续顺序构建更多的弱学习器,每个弱学习器纠正前一棵树,直到达到要构建的树的数量。
29、所述步骤c4构造dual-attention rnn模型,其建立过程如下:
30、步骤c4.1:encoder和decoder中都以lstm为基本单元,dual-attention包括序列信息输入时的input attention机制和解码过程中的temporal attention机制;
31、步骤c4.2:给出k维时间长度为t的序列特征根据lstm单元的隐藏状态ht-1和细胞状态ct-1,利用attention方法建立input attention机制;具体公式如下:
32、
33、
34、其中ve,we,ue是要学习的参数,得到权重后,则新的特征序列为:
35、lstm单元的隐藏状态则更新为:其中f1为lstm隐藏状态更新函数;
36、步骤c4.3:在人为给定参数训练后,为了更进一步优化模型,同时兼顾训练效率,采用了随机网格搜索的方法进行了参数寻优。
37、所述步骤c4.1:temporal attention机制具体公式如下:
38、
39、
40、其中dt-1和s′t-1分别为lstm的隐藏状态和细胞状态,ve,wd,ud是要学习的参数;
41、则有:
42、对于模型输出值则有
43、所述模型参数主要有时间序列的长度以及encoder和decoder中的两个lstm的隐藏状态的向量长度,同时还有训练参数中的学习率和batch size。
44、相比于现有技术,本发明具有以下优势:
45、本发明基于tacview三维可视化仿真,通过基于集成学习技术实现中远距作战飞行器轨迹预测,与tacview实现实时数据通信,可视化对比敌方飞行器轨迹预测结果;本发明在不同的飞行器预测初始状态下,通过设计集成器中各子模型因子,可精确实现对飞行器飞行经纬高、飞行滚转的自适应预测,在不同参数下,可达到不同预测效果;算法计算消耗低,可在线实现,具备较大规模并行计算的能力。预测结果量可做为我方空战决策模型的关键输入量,为我方机动决策提供先验支撑性;本发明的预测方法可快速在一定精度范围内对飞行器的飞行轨迹进行一定时长的预测,为飞行轨迹预测和快速并行飞行轨迹计算相关研究提供了新的思路。
- 还没有人留言评论。精彩留言会获得点赞!