一种山地油气管道巡检无人机飞行控制的方法及系统与流程
1.本发明涉及飞行控制领域,尤其涉及一种山地油气管道巡检无人机飞行控制的方法及系统。
背景技术:
2.目前,无人机巡检作为一种新兴的巡检手段已经在油气管道巡检中崭露头角。尤其是垂直起降无人机,与固定翼无人机不同,不需要跑道和回收装置,续航时间长,在长输管道的巡检中表现尤为突出,通过搭载多种设备(高清相机,双光吊舱,激光甲烷遥测仪等)及时捕获管道周边的环境情况并反馈到管理人员进行处理。
3.目前山地油气管道,地势起伏大,地质灾害频发,人工巡检往往难以到达,且山地往往乱流较多,对无人机巡检也带来挑战,甚至威胁飞行安全。常用的线性控制算法不能满足飞行鲁棒性的需求。
技术实现要素:
4.根据本发明实施例的第一方面,提供一种山地油气管道巡检无人机飞行控制的方法,能够解决常用的线性控制算法不能满足飞行鲁棒性的需求的问题。
5.本发明提供的一种山地油气管道巡检无人机飞行控制的方法,该方法包括步骤如下:
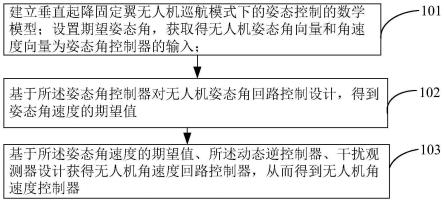
6.步骤1建立垂直起降固定翼无人机巡航模式下的姿态控制的数学模型;设置期望姿态角,获取得无人机姿态角向量和角速度向量为姿态角控制器的输入;
7.步骤2基于动态逆控制器对无人机姿态角回路控制设计,得到姿态角速度的期望值x
2c
;
8.步骤3基于所述姿态角速度的期望值x
2c
、动态逆控制器、干扰观测器设计无人机角速度回路控制器,从而实现对无人机飞行控制。
9.优选地,步骤1建立垂直起降固定翼无人机巡航模式下的姿态控制的数学模型为:
[0010][0011]
其中,状态量x1=[φ,θ,ψ]
t
为无人机姿态角向量,θ、ψ分别为滚转角、俯仰角和偏航角;r为状态矩阵,t为转置符号
[0012][0013]
状态量x2=[p,q,r]
t
为角速度向量,p为滚转角速度、q为俯仰角速度、r为偏航角速度、俯仰角速度和偏航角速度;t为转置符号;f为已知的向量;向量d=[d
l
,dm,dn]
t
为气动力参数的不精确以及飞行过程中风扰引起的不确定性;
[0014]
该控制输入向量u=[l,m,n]
t
,l、m、n分别表示为滚转力矩、俯仰力矩以及偏航力矩;t为转置符号。
[0015]
优选地,状态矩阵r表达式为,
[0016][0017]
优选地,向量f为:
[0018][0019]
其中,i
x
表示为x轴方向无人机转动惯量,iy表示表示为y轴方向无人机转动惯量,iz表示z轴方向的表示为x轴方向无人机转动惯量,,通过测量和估算得到;p、q、r分别为滚转角速度;
[0020]
优选地,转动惯量矩阵j为:
[0021][0022]
优选地,步骤2基于动态逆控制器对无人机姿态角回路控制设计,得到姿态角速度的期望值x
2c
;姿态角速度的期望值x
2c
为:
[0023]
x
2c
=r-1wꢀꢀꢀꢀ
(6)
[0024]
姿态角控制回路动态逆控制中间向量w为:
[0025][0026]
其中,x
1c
=[φc,θc,ψc]
t
为期望的姿态角,其中期望的滚转角φc、俯仰角θc和偏航角ψc,由外界输入;k
p1
为滚转角速度比例控制系数、k
q1
为俯仰角速度比例控制系数、k
r1
为偏航角速度比例控制系数;。
[0027]
优选地,偏航角的角速度为
[0028][0029]
其中,v为空速,g为重力加速度。
[0030]
优选地,步骤3基于姿态角速度的期望值x
2c
、动态逆控制器、干扰观测器设计无人机角速度回路控制器,是指为补偿姿态角速度模型中不确定性的影响,设计干扰观测器,所述干扰观测器公式如下:
[0031][0032]
其中,变量z1,z2,z3是状态量x2、不确定性d、不确定性的导数的估计值,λ1,λ2,λ3和l为观测器参数,v1、v2是干扰观测器的中间变量。
[0033]
优选地,干扰观测器不确定性d的估计值z2,所述非线性动态逆控制器设计姿态角速度控制输入u为:
[0034]
u=g-1
(v-f-z2)
ꢀꢀꢀꢀ
(10)
[0035][0036]
其中,g为重力加速度;v为姿态角动态逆控制中间向量;f为已知向量;z2为姿态角速度控制回路中干扰的预估值;x
2c
=[pc,qc,rc]
t
为期望的角速度,期望的滚转角速度pc、期望的俯仰角速度qc和期望的偏航角速度rc由外环的姿态角控制器产生,k
p2
,k
q2
,k
r2
为姿态角速度控制回路比例控制系数。
[0037]
本发明提供的一种山地油气管道巡检无人机飞行控制的方法,本发明相比于传统的pid控制器(proportion integration differentiation,比例-积分-微分控制器),采用的动态逆控制律来进行系统的线性化和解耦,对固定翼无人机大迎角机动起到良好的控制效果。此外干扰观测器的引入能有效的估计由于风扰以及模型的不确定性带来的总扰动,补偿到动态逆控制器中,提高系统的鲁棒性;考虑了系统的非线性特性,能很好解决常用的线性控制算法不能满足飞行鲁棒性的需求的问题。
[0038]
本发明实施例提供的一种山地油气管道巡检无人机飞行控制的方法根据本发明实施例的第二方面,提供一种山地油气管道巡检无人机飞行控制的系统,该系统包括;
[0039]
一种山地油气管道巡检无人机的飞行控制系统,该系统包括姿态角控制器、角速度控制器、干扰控制器、状态反馈模块、期望姿态角模块;
[0040]
其中,姿态角控制器,是基于动态逆控制器无人机姿态角回路控制设计,得到姿态角速度的期望值x
2c
;
[0041]
其中,角速度控制器,是基于姿态角速度的期望值x
2c
、动态逆控制器、干扰观测器获得无人机角速度回路控制器,从而得到对无人机角速度控制器;
[0042]
该干扰控制器,是为了补偿所述姿态角速度模型中不确定性的影响,设计观测器;
[0043]
其中,状态反馈模块,用于获取无人机姿态角向量和角速度向量;
[0044]
所述期望姿态角模块,用于建立垂直起降固定翼无人机巡航模式下的姿态控制的数学模型,设置期望的姿态角;
[0045]
该系统建立垂直起降固定翼无人机巡航模式下的姿态控制的数学模型;设置期望姿态角,所述状态反馈模块获取的无人机姿态角向量和角速度向量为姿态角控制器的输
入;所述姿态角控制器的设计是基于动态逆控制器对无人机姿态角回路控制的设计,得到姿态角速度的期望值x
2c
;角速度控制器是基于姿态角速度的期望值x
2c
、动态逆控制器、干扰观测器设计无人机角速度回路控制器,从而实现对无人机飞行控制。
[0046]
优选地,系统建立垂直起降固定翼无人机巡航模式下的姿态控制的数学模型;设置期望姿态角,获取得无人机姿态角向量和角速度向量,为姿态角控制器的输入,是指建立垂直起降固定翼无人机巡航模式下的姿态控制的数学模型为:
[0047][0048]
其中,状态量x1=[φ,θ,ψ]
t
为无人机姿态角向量,θ、ψ分别为滚转角、俯仰角和偏航角;r为状态矩阵,t为转置符号;
[0049][0050]
状态量x2=[p,q,r]
t
为角速度向量,p为滚转角速度、q为俯仰角速度、r为偏航角速度;t为转置符号;f为已知的向量;向量d=[d
l
,dm,dn]
t
为气动力参数的不精确以及飞行过程中风扰引起的不确定性;
[0051]
其中,控制输入向量u=[l,m,n]
t
,l、m、n分别表示为滚转力矩、俯仰力矩以及偏航力矩;t为转置符号;
[0052]
该状态矩阵r表达式为,
[0053][0054]
其中,向量f为:
[0055][0056]
其中,i
x
表示为x轴方向无人机转动惯量,iy表示表示为y轴方向无人机转动惯量,iz表示z轴方向的表示为x轴方向无人机转动惯量,通过测量和估算得到;
[0057]
其中,转动惯量矩阵j为:
[0058][0059]
优选地,该姿态角控制器设计是动态逆无人机姿态角控制器回路控制设计,得到姿态角速度的期望值x
2c
;所述姿态角速度的期望值x
2c
为:
[0060]
x
2c
=r-1wꢀꢀꢀꢀ
(6)
[0061]
姿态角控制回路中动态逆控制中间向量w为:
[0062][0063]
其中,x
1c
=[φc,θc,ψc]
t
为期望的姿态角,其中期望的滚转角φc、俯仰角θc和偏航角ψc,由外界输入;k
p1
为滚转角速度比例控制系数、k
q1
为俯仰角速度比例控制系数、k
r1
为偏航角速度比例控制系数;
[0064]
该角速度控制器设计为偏航角的角速度为
[0065][0066]
其中,v为空速,g为重力加速度;
[0067]
所述干扰观测器公式如下:
[0068][0069]
其中,变量z1,z2,z3是状态量x2、不确定性d、不确定性的导数的估计值,λ1,λ2,λ3和l为观测器参数,v1、v2是干扰观测器中间变量;
[0070]
优选地,非线性动态逆控制器设计姿态角速度控制输入u为:
[0071]
u=g-1
(v-f-z2)
ꢀꢀꢀꢀ
(10)
[0072][0073]
其中,g为重力加速度;v为姿态角动态逆控制中间向量;f为已知向量;z2为预估值;x
2c
=[pc,qc,rc]
t
为期望的角速度,期望的滚转角速度pc、期望的俯仰角速度qc和期望的偏航角速度rc由外环的姿态角控制器产生,k
p1
为滚转角速度比例控制系数、k
q1
为俯仰角速度比例控制系数、k
r1
为偏航角速度比例控制系数;。
[0074]
本发明实施例提供的一种山地油气管道巡检无人机飞行控制的系统,本发明相比于传统的pid控制器(proportion integration differentiation,比例-积分-微分控制器),采用的动态逆控制律来进行系统的线性化和解耦,对固定翼无人机大迎角机动起到良好的控制效果。此外干扰观测器的引入能有效的估计由于风扰以及模型的不确定性带来的总扰动,补偿到动态逆控制器中,提高系统的鲁棒性;考虑了系统的非线性特性,能很好解决常用的线性控制算法不能满足飞行鲁棒性的需求的问题。
[0075]
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
[0076]
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明的实施例,并与说明书一起用于解释本发明的原理。
[0077]
图1是本发明实施例提供的一种山地油气管道巡检无人机飞行控制的方法的流程图;
[0078]
图2是本发明实施例提供的一种山地油气管道巡检无人机飞行控制的方法结构示意图;
[0079]
图3是本发明实施例提供的一种山地油气管道巡检无人机飞行控制的方法期望的滚转角与实际的滚转角仿真图;
[0080]
图4是本发明实施例提供的一种山地油气管道巡检无人机飞行控制的方法系统期望的俯仰角与实际的俯仰角仿真图;
[0081]
图5是本发明实施例提供的一种山地油气管道巡检无人机飞行控制的方法实际的偏航角仿真图;
[0082]
图6是本发明实施例提供的一种山地油气管道巡检无人机飞行控制的方法期望的滚转角速度与实际的滚转角速度仿真图;
[0083]
图7是本发明实施例提供的一种山地油气管道巡检无人机飞行控制的方法期望的俯仰角速度与实际的俯仰角速度仿真图;
[0084]
图8是本发明实施例提供的一种山地油气管道巡检无人机飞行控制的方法期望的偏航角速度与实际的偏航角速度仿真图;
[0085]
图9是本发明实施例提供的一种山地油气管道巡检无人机飞行控制的方法实际的侧滑角仿真图。
具体实施方式
[0086]
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本发明相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本发明的一些方面相一致的装置和方法的例子。
[0087]
实施例一、
[0088]
如图1所示,本实施例提供一种山地油气管道巡检无人机飞行控制的方法,该方法步骤如下:
[0089]
步骤1建立垂直起降固定翼无人机巡航模式下的姿态控制的数学模型;设置期望姿态角,获取得无人机姿态角向量和角速度向量为姿态角控制器的输入;
[0090]
步骤2基于动态逆控制器对无人机姿态角回路控制设计,得到姿态角速度的期望值x
2c
;
[0091]
步骤3基于姿态角速度的期望值x
2c
、动态逆控制器、干扰观测器获得无人机角速度回路控制器,从而得到对无人机角速度控制器。
[0092]
在一个实施例中,步骤1建立垂直起降固定翼无人机巡航模式下的姿态控制的数学模型为:
[0093]
[0094]
其中,状态量x1=[φ,θ,ψ]
t
为无人机姿态角向量,θ、ψ分别为滚转角、俯仰角和偏航角;r为状态矩阵,t为转置符号
[0095][0096]
状态量x2=[p,q,r]
t
为角速度向量,p、q、r分别为滚转角速度、俯仰角速度和偏航角速度;t为转置符号;f为已知的向量;向量d=[d
l
,dm,dn]
t
为气动力参数的不精确以及飞行过程中风扰引起的不确定性;
[0097]
该控制输入向量u=[l,m,n]
t
,l、m、n分别表示为滚转力矩、俯仰力矩以及偏航力矩;t为转置符号。
[0098]
在一个实施例中,状态矩阵r表达式为,
[0099][0100]
在一个实施例中,向量f为:
[0101][0102]
其中,i
x
、iy和iz为无人机转动惯量,通过测量和估算得到;p、q、r分别为滚转角速度;
[0103]
在一个实施例中,转动惯量矩阵j为:
[0104][0105]
在一个实施例中,步骤2基于动态逆无人机姿态角控制器回路控制设计,得到姿态角速度的期望值x
2c
;姿态角速度的期望值x
2c
为:
[0106]
x
2c
=r-1wꢀꢀꢀꢀ
(6)
[0107]
姿态角控制回路动态逆控制中间向量w为:
[0108][0109]
其中,x
1c
=[φc,θc,ψc]
t
为期望的姿态角,其中期望的滚转角φc、俯仰角θc和偏航角ψc,由外界输入;k
p1
为滚转角速度比例控制系数、k
q1
为俯仰角速度比例控制系数、k
r1
为偏航角速度比例控制系数;。
[0110]
在一个实施例中,偏航角的角速度为
[0111][0112]
其中,v为空速,g为重力加速度。
[0113]
在一个实施例中,步骤3基于姿态角速度的期望值x
2c
、动态逆控制以、干扰观测器设计无人机角速度回路控制器,是指为补偿姿态角速度模型中不确定性的影响,设计干扰观测器,所述干扰观测器公式如下:
[0114][0115]
其中,变量z1,z2,z3是状态量x2、不确定性d、不确定性的导数的估计值,λ1,λ2,λ3和l为观测器参数,v1、v2是干扰观测器的中间变量。
[0116]
在一个实施例中,干扰观测器不确定性d的估计值z2,所述非线性动态逆控制器设计姿态角速度控制输入u为:
[0117]
u=g-1
(v-f-z2)
ꢀꢀꢀꢀ
(10)
[0118][0119]
其中,g为重力加速度;v为姿态角动态逆控制中间向量;f为已知向量;z2为姿态角速度控制回路中干扰的预估值;x
2c
=[pc,qc,rc]
t
为期望的角速度,期望的滚转角速度pc、期望的俯仰角速度qc和期望的偏航角速度rc由外环的姿态角控制器产生,k
p2
,k
q2
,k
r2
为姿态角速度控制回路比例控制系数。
[0120]
本发明实施例提供的一种山地油气管道巡检无人机飞行控制的方法,本发明相比于传统的pid控制器(proportion integration differentiation,比例-积分-微分控制器),采用的动态逆控制律来进行系统的线性化和解耦,对固定翼无人机大迎角机动起到良好的控制效果。此外干扰观测器的引入能有效的估计由于风扰以及模型的不确定性带来的总扰动,补偿到动态逆控制器中,提高系统的鲁棒性;考虑了系统的非线性特性,能很好解决常用的线性控制算法不能满足飞行鲁棒性的需求的问题。
[0121]
实施例二、
[0122]
本发明实施例提供的一种山地油气管道巡检无人机飞行控制的方法如图2所示,该方法步骤如下:
[0123]
步骤一、建立垂直起降固定翼无人机巡航模式下的姿态控制的数学模型。
[0124][0125][0126]
其中,状态量x1=[φ,θ,ψ]
t
为无人机姿态角向量,p为滚转角速度、q为俯仰角速度、r为偏航角速度;状态量x2=[p,q,r]
t
为角速度向量,分别为滚转角速度、俯仰角速度和
偏航角速度。控制输入向量u=[l,m,n]
t
,分别表示为滚转力矩、俯仰力矩以及偏航力矩,r为状态矩阵,f为已知的向量,j为转动惯量矩阵,
[0127]
具体表达式为
[0128][0129][0130][0131]
其中,i
x
表示为x轴方向无人机转动惯量,iy表示表示为y轴方向无人机转动惯量,iz表示z轴方向的表示为x轴方向无人机转动惯量,通过测量和估算得到。
[0132]
向量d=[d
l
,dm,dn]
t
为气动力参数的不精确以及飞行过程中风扰引起的不确定性。在此实用例中,无人机转动惯量i
x
、iy和iz,通过测量和估算得到为i
x
=0.81,iy=1.08,iz=1.82。
[0133]
步骤二、基于动态逆控制器无人机姿态角回路控制器设计
[0134]
基于非线性动态逆控制器和公式(1)设计控制输入x
2c
[0135]
x
2c
=r-1wꢀꢀꢀꢀ
(6)
[0136][0137]
其中,x
1c
=[φc,θc,ψc]
t
为期望的姿态角,其中期望的滚转角φc、俯仰角θc和偏航角ψc,由外界输入。w为姿态角动态逆控制中间向量,k
p1
,k
q1
,k
r1
为姿态角比例控制系数,在此实用例中k
p1
=1.5,k
q1
=1.5,k
r1
=1.5。
[0138]
为了使巡航飞行过程中侧滑角为0,实现协调转弯,修改公式(7)中向量w第三项w(3),即偏航角角速度为
[0139][0140]
其中,v为空速,g为重力加速度。
[0141]
步骤三、基于姿态角速度的期望值x
2c
、动态逆控制器以及干扰观测器获得无人机角速度回路控制器。从而得到无人机角速度控制器。为了补偿姿态角速度模型中不确定性的影响,设计干扰观测器,干扰观测器公式如下
[0142][0143]
其中变量z1,z2,z3是状态量x2,不确定性d,不确定性的导数的估计值,λ1,λ2,λ3和l为观测器参数。在本实用例中,根据经验值设置,λ1=30,λ2=300,λ3=1000,l=0.02。
[0144]
基于干扰观测器公式(9)不确定性d的估计值z2,以及非线性动态逆控制器设计姿态角速度控制输入u
[0145]
u=g-1
(v-f-z2)
ꢀꢀꢀꢀ
(10)
[0146][0147]
其中,x
2c
=[pc,qc,rc]
t
为期望的角速度,由步骤二求得,其中期望的滚转角速度pc、期望的俯仰角速度qc和期望的偏航角速度rc由外环的姿态角控制器产生。v为姿态角动态逆控制中间向量。
[0148]kp1
为滚转角速度比例控制系数、k
q1
为俯仰角速度比例控制系数、k
r1
为偏航角速度比例控制系数,在此实用例中,根据经验设置k
p2
=7,k
q2
=7,k
r2
=7。
[0149]
接下来,设置仿真时间为10秒,期望的滚转角和俯仰角为0.13rad。仿真结果如图2至图9。
[0150]
基于上述图1对应的实施例中所描述的一种山地油气管道巡检无人机飞行控制的方法,下述为本公开系统实施例。
[0151]
本发明提供的一种山地油气管道巡检无人机飞行控制的方法,本发明相比于传统的pid控制器(proportion integration differentiation,比例-积分-微分控制器),采用的动态逆控制律来进行系统的线性化和解耦,对固定翼无人机大迎角机动起到良好的控制效果。此外干扰观测器的引入能有效的估计由于风扰以及模型的不确定性带来的总扰动,补偿到动态逆控制器中,提高系统的鲁棒性;考虑了系统的非线性特性,能很好解决常用的线性控制算法不能满足飞行鲁棒性的需求的问题。
[0152]
实施例三、
[0153]
本实施例提供一种山地油气管道巡检无人机的飞行控制系统,该系统包括姿态角控制器、角速度控制器、干扰控制器、状态反馈模块、期望姿态角模块;
[0154]
其中,姿态角控制器,是基于动态逆控制器无人机姿态角回路控制设计,得到姿态角速度的期望值x
2c
;
[0155]
其中,角速度控制器,是基于动态逆控制器、干扰观测器设计无人机角速度回路控制器,从而实现对无人机飞行控制;
[0156]
该干扰控制器,是为了补偿所述姿态角速度模型中不确定性的影响,设计观测器;
[0157]
其中,状态反馈模块,用于获取无人机姿态角向量和角速度向量;
[0158]
该期望姿态角模块,用于建立垂直起降固定翼无人机巡航模式下的姿态控制的数学模型,设置期望的姿态角该系统建立垂直起降固定翼无人机巡航模式下的姿态控制的数学模型;设置期望姿态角,所述状态反馈模块获取的无人机姿态角向量和角速度向量为姿态角控制器的输入;所述姿态角控制器的设计是基于动态逆控制器对无人机姿态角回路控制的设计,得到姿态角速度的期望值x
2c
;姿态角控制器的输出为角速度控制器的输入,所述角速度控制器是基于姿态角速度的期望值x
2c
、动态逆控制器、干扰观测器获得无人机角速度回路控制器,从而得到对无人机角速度控制器。
[0159]
在一个实施例中,系统建立垂直起降固定翼无人机巡航模式下的姿态控制的数学模型;设置期望姿态角,获取得无人机姿态角向量和角速度向量,为姿态角控制器的输入,是指建立垂直起降固定翼无人机巡航模式下的姿态控制的数学模型为:
[0160][0161]
其中,状态量x1=[φ,θ,ψ]
t
为无人机姿态角向量,θ、ψ分别为滚转角、俯仰角和偏航角;r为状态矩阵,t为转置符号;
[0162][0163]
状态量x2=[p,q,r]
t
为角速度向量,p为滚转角速度、q为俯仰角速度、r为偏航角速度;t为转置符号;f为已知的向量;向量d=[d
l
,dm,dn]
t
为气动力参数的不精确以及飞行过程中风扰引起的不确定性;
[0164]
其中,控制输入向量u=[l,m,n]
t
,l表示为滚转力矩、m为俯仰力矩以及、n为偏航力矩;t为转置符号;
[0165]
该状态矩阵r表达式为,
[0166][0167]
其中,向量f为:
[0168][0169]
其中,i
x
表示为x轴方向无人机转动惯量,iy表示表示为y轴方向无人机转动惯量,iz表示z轴方向的表示为x轴方向无人机转动惯量,通过测量和估算得到;p、q、r分别为滚转角速度;
[0170]
其中,转动惯量矩阵j为:
[0171]
[0172]
在一个实施例中,该姿态角控制器设计是基于动态逆无人机姿态角控制器回路控制设计,得到姿态角速度的期望值x
2c
;所述姿态角速度的期望值x
2c
为:
[0173]
x
2c
=r-1wꢀꢀꢀꢀ
(6)
[0174]
姿态角控制回路中动态逆控制中间向量w为:
[0175][0176]
其中,x
1c
=[φc,θc,ψc]
t
为期望的姿态角,其中期望的滚转角φc、俯仰角θc和偏航角ψc,由外界输入;k
p1
为滚转角速度比例控制系数、k
q1
为俯仰角速度比例控制系数、k
r1
为偏航角速度比例控制系数;
[0177]
该角速度控制器设计为偏航角的角速度为
[0178][0179]
其中,v为空速,g为重力加速度;
[0180]
该干扰观测器公式如下:
[0181][0182]
其中,变量z1,z2,z3是状态量x2、不确定性d、不确定性的导数的估计值,λ1,λ2,λ3和l为观测器参数,v1、v2是干扰观测器中间变量;
[0183]
在一个实施例中,非线性动态逆控制器设计姿态角速度控制输入u为:
[0184]
u=g-1
(v-f-z2)(10)
[0185][0186]
其中,g为重力加速度;v为姿态角动态逆控制中间向量;f为已知向量;z2为预估值;x
2c
=[pc,qc,rc]
t
为期望的角速度,期望的滚转角速度pc、期望的俯仰角速度qc和期望的偏航角速度rc由外环的姿态角控制器产生,k
p1
为滚转角速度比例控制系数、k
q1
为俯仰角速度比例控制系数、k
r1
为偏航角速度比例控制系数。
[0187]
本发明实施例提供的一种山地油气管道巡检无人机飞行控制的系统,本发明相比于传统的pid控制器(proportion integration differ entiation,比例-积分-微分控制器),采用的动态逆控制律来进行系统的线性化和解耦,对固定翼无人机大迎角机动起到良好的控制效果。此外干扰观测器的引入能有效的估计由于风扰以及模型的不确定性带来的总扰动,补偿到动态逆控制器中,提高系统的鲁棒性;考虑了系统的非线性特性,能很好解决常用的线性控制算法不能满足飞行鲁棒性的需求的问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1