基于数字孪生的掘进工作面井下集中控制系统及方法与流程
本发明涉及掘进设备远程控制,尤其涉及一种基于数字孪生的掘进工作面井下集中控制系统及方法。
背景技术:
1、多年来煤矿一直存在采掘失衡的难题,而且掘进工作面环境危险源多,作业条件差,水、瓦斯、粉尘、高温、高湿、高噪声等都严重威胁着工作人员的生命财产安全,因此,实现掘进设备远程控制,成为一个趋势。
2、随着远程控制技术的迭代,以及网络通讯的发展,掘进设备远程控制技术已经基本实现了远程集中控制工作面迎头主力掘进设备,但由于掘进工作面空间受限以及复杂作业环境等条件制约,当前技术仅能满足掘进设备的基本动作控制。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本发明的第一个目的在于提出一种基于数字孪生的掘进工作面井下集中控制系统,以实现对掘进设备的三维动作模型的虚拟仿真写实、掘进设备的位姿导向、高精度的多源异形传感器以及低时延的5g(5th generation mobile communicationtechnology,第五代移动通信技术,简称5g)通讯技术进行融合,在集控中心根据掘进设备的运行检测数据,实现掘进设备的远程集中控制及场景孪生体虚拟再现。
3、本发明的第二个目的在于提出一种基于数字孪生的掘进工作面井下集中控制方法。
4、本发明的第三个目的在于提出一种基于数字孪生的掘进工作面井下集中控制装置。
5、本发明的第四个目的在于提出一种电子设备。
6、本发明的第五个目的在于提出一种非瞬时计算机可读存储介质。
7、本发明的第六个目的在于提出一种计算机程序产品。
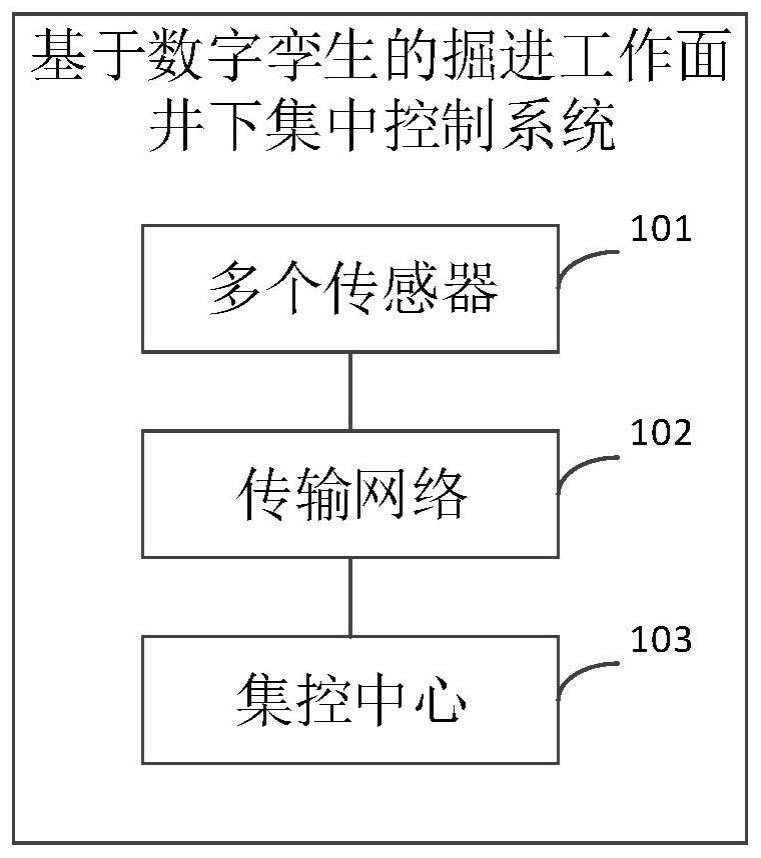
8、为达上述目的,本发明第一方面实施例提出了一种基于数字孪生的掘进工作面井下集中控制系统,包括多个传感器,传输网络和集控中心;
9、其中,所述多个传感器中的各传感器,分别用于采集掘进设备的至少一种运行监测数据;
10、所述传输网络,与所述多个传感器连接,用于将所述掘进设备的运行监测数据发送至所述集控中心;
11、所述集控中心,与所述多个传感器连接,用于根据所述掘进设备的运行监测数据,对所述掘进设备的虚拟模型预测模型动作数据,以根据所述模型动作数据,对所述掘进设备的虚拟模型进行远程孪生体上位机再现;以及,响应于控制操作,生成所述掘进设备的控制指令,以根据所述掘进设备的控制指令,对所述远程孪生体进行动作控制;
12、所述传输网络,与所述掘进设备连接,用于向所述掘进设备发送所述控制指令。
13、可选地,作为第一方面的第一种可能的实现方式,所述集控中心,具体用于:
14、获取所述掘进设备的运行监测数据;
15、获取所述掘进设备的运行监测数据与虚拟模型的模型动作数据之间的映射关系;
16、根据所述映射关系,确定所述掘进设备的运行监测数据对应的所述模型动作数据;
17、根据所述模型动作数据,调用开放式图形库的应用程序接口,以绘制符合所述模型动作数据的虚拟模型。
18、可选地,作为第一方面的第二种可能的实现方式,所述集控中心,具体用于:
19、获取所述掘进设备的运行监测数据;
20、调用目标插件,对所述掘进设备的运行监测数据进行视频处理,其中,所述视频处理包括预览、抓图、存储中的至少一个。
21、可选地,作为第一方面的第三种可能的实现方式,所述多个传感器,包括:陀螺仪、温度传感器、电流传感器、电压传感器、振动传感器、转速传感器、瓦斯传感器、粉尘传感器中的一个或多个组合。
22、可选地,作为第一方面的第四种可能的实现方式,所述运行监测数据包括姿态数据、温度数据、电流数据、电压数据、振动数据、转速数据、瓦斯数据、粉尘数据。
23、本发明实施例的基于数字孪生的掘进工作面井下集中控制系统包括:多个传感器,传输网络和集控中心。其中,多个传感器中的各传感器,分别用于采集掘进设备的至少一种运行监测数据;传输网络,与多个传感器连接,用于将掘进设备的运行监测数据发送至集控中心;集控中心,与多个传感器连接,用于根据掘进设备的运行监测数据,对掘进设备的虚拟模型预测模型动作数据,以根据模型动作数据,对掘进设备的虚拟模型进行远程孪生体上位机再现,以及,响应于控制操作,生成掘进设备的控制指令,以根据掘进设备的控制指令,
24、对远程孪生体进行动作控制;传输网络,与掘进设备连接,用于向掘进设备发5送控制指令。由此,可实现掘进设备的远程集中控制及场景孪生体虚拟再现。
25、为达上述目的,本发明第二方面实施例提出了一种基于数字孪生的掘进工作面井下集中控制方法,包括:
26、通过多个传感器采集掘进设备的至少一种运行监测数据;
27、通过传输网络将所述掘进设备的运行监测数据发送至集控中心;
28、0根据所述掘进设备的运行监测数据,由所述集控中心对所述掘进设备的虚拟模型预测模型动作数据;
29、根据所述模型动作数据,通过所述集控中心对所述掘进设备的虚拟模型进行远程孪生体上位机再现;
30、响应于所述集控中心检测到的控制操作,生成所述掘进设备的控制指令;5通过所述传输网络向所述掘进设备发送所述控制指令,以根据所述掘进设备的控制指令,由所述集控中心对所述远程孪生体进行动作控制。
31、本发明实施例的基于数字孪生的掘进工作面井下集中控制方法,通过多个传感器采集掘进设备的至少一种运行监测数据,以及通过传输网络将掘进设备
32、的运行监测数据发送至集控中心,实现根据掘进设备的运行监测数据,由集控0中心对掘进设备的虚拟模型预测模型动作数据,从而根据模型动作数据,通过集控中心对掘进设备的虚拟模型进行远程孪生体上位机再现,进而响应于集控中心检测到的控制操作,生成掘进设备的控制指令,并通过传输网络向掘进设备发送控制指令,以根据掘进设备的控制指令,由集控中心对远程孪生体进行动作控制。由此,可实现掘进设备的远程集中控制及场景孪生体虚拟再现。
33、为达上述目的,本发明第三方面实施例提出了一种基于数字孪生的掘进工作面井下集中控制装置,包括:
34、采集模块,用于通过多个传感器采集掘进设备的至少一种运行监测数据;
35、第一发送模块,用于通过传输网络将所述掘进设备的运行监测数据发送至集控中心;
36、预测模块,用于根据所述掘进设备的运行监测数据,由所述集控中心对所述掘进设备的虚拟模型预测模型动作数据;
37、处理模块,用于根据所述模型动作数据,通过所述集控中心对所述掘进设备的虚拟模型进行远程孪生体上位机再现;
38、生成模块,用于响应于所述集控中心检测到的控制操作,生成所述掘进设备的控制指令;
39、第二发送模块,用于通过所述传输网络向所述掘进设备发送所述控制指令,以根据所述掘进设备的控制指令,由所述集控中心对所述远程孪生体进行动作控制。
40、本发明实施例的基于数字孪生的掘进工作面井下集中控制装置,通过多个传感器采集掘进设备的至少一种运行监测数据,以及通过传输网络将掘进设备的运行监测数据发送至集控中心,实现根据掘进设备的运行监测数据,由集控中心对掘进设备的虚拟模型预测模型动作数据,从而根据模型动作数据,通过集控中心对掘进设备的虚拟模型进行远程孪生体上位机再现,进而响应于集控中心检测到的控制操作,生成掘进设备的控制指令,并通过传输网络向掘进设备发送控制指令,以根据掘进设备的控制指令,由集控中心对远程孪生体进行动作控制。由此,可实现掘进设备的远程集中控制及场景孪生体虚拟再现。
41、为了实现上述目的,本发明第四方面实施例提出了一种电子设备,包括:
42、至少一个处理器;以及
43、与所述至少一个处理器通信连接的存储器;其中,
44、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行第二方面所述的基于数字孪生的掘进工作面井下集中控制方法。
45、为了实现上述目的,本发明第五方面实施例提出了一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行第二方面所述的基于数字孪生的掘进工作面井下集中控制方法。
46、为了实现上述目的,本发明第六方面实施例提出了一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现第二方面所述的基于数字孪生的掘进工作面井下集中控制方法。
47、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!