一种高集成度的一体化航电控制系统的制作方法
1.本实用新型涉及航电飞行控制系统技术领域,更具体地,涉及一种高集成度的一体化航电控制系统。
背景技术:
2.随着通航电子电气技术的发展,航电产品的应用类型也越来越广泛,因各电气部件涉及不同类型、不同功能和不同品牌等因素,飞行的航电控制系统中多采用相互独立控制系统,虽然满足了系统控制的需求,但是由于不同系统的模块无法统一化,从而导致各电气部件之间的电磁干扰、部分功能冗余、结构布局受限等不良影响越来越明显,关键由于缺乏统一的兼容性控制平台,各电气部件之间的数据传输、处理和控制等功能存在一定的局限性,导致数据的交互性延时,控制的实时性较差,一定程度上对通航飞行器的可靠性、功能安全等性能也会产生不良影响。
3.如202010799036.6一种基于afdx网络的空中交通飞行器的航电系统公开的航电系统,包括飞行控制系统、整机控制系统、驾驶舱显示与控制系统和无线通信系统,所述飞行控制系统与所述整机控制系统通过双冗余afdx总线网络通信连接;所述双冗余afdx总线网络包括两套由航空电子全双工网络交换机组搭建的afdx总线网络,即为两套分别独立工作的afdx总线网络。所述驾驶舱显示与控制系统分别与每套所述afdx总线网络通信连接,所述无线通信系统分别与每套所述afdx总线网络通信连接;所述飞行控制系统包括冗余的至少三个飞行控制计算机,所述飞行控制计算机分别与每套所述afdx总线网络通信连接;所述整机控制系统包括冗余的至少三个整机控制器,所述整机控制器分别与每套所述afdx总线网络通信连接。由此可见,所述的航电系统的集成化程度低,只能单个的对飞行状态进行控制,功能单一且系统结构冗余,不利于控制系统的集成一体化发展。
技术实现要素:
4.本实用新型要解决的技术问题是针对现有通航飞行器中各航电部件之间相互独立,存在功能冗余、电磁干扰的现象,集成一体化程度低不足,提供一种高集成度的一体化航电控制系统。
5.本实用新型的目的通过以下技术方案予以实现:
6.一种高集成度的一体化航电控制系统,包括:
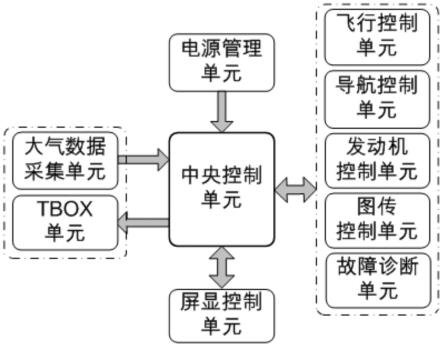
7.中央控制单元,分别与大气数据采集单元和集成单元连接,接收大气数据采集单元和集成单元的信号数据,并计算出飞行器的飞行状态及需要调整的飞行参数。
8.大气数据采集单元,包括与中央控制单元连接的数据采集模块。
9.集成单元,包括飞控系统、导航系统、发动机控制系统、图传系统,所述飞控系统、导航系统、发动机控制系统、图传系统分别与中央控制系统连接。
10.屏显控制单元,包括与中央控制单元连接的主机,与主机连接屏显装置,主机接收来自中央控制单元的关键控制参数,并将关键指标与最佳航线通过屏显控制单元直观显示
出来。
11.电源管理单元,分别与中央控制单元、大气数据采集单元、飞行控制集成单元和屏显控制单元连接。
12.进一步地,所述中央控制单元包括数据处理模块、数据存储模块和控制模块,所述数据处理模块的输入端与大气数据采集单元和集成单元的各系统连接,其输出端与数据存储模块和控制模块连接,通过数据处理模块快速处理信号数据,提高中央控制单元的数据处理和数据反馈时效。
13.进一步地,所述高集成度的一体化航电控制系统还包括故障诊断单元,所述故障诊断单元与中央控制单元连接,结合故障诊断单元采集到集成单元的各系统的关键控制参数,再与既存数据库中的正常参数进行对比分析,同步将分析后的结果反馈至控制中心进行再次确认,然后将相应的故障代码传输至屏显控制单元,以便于及时了解飞行器的工作状态并采取相应的安全控制措施。
14.进一步地,所述高集成度的一体化航电控制系统还包括tbox单元,用于航电系统运行过程中的各数据存储以及与地面控制系统建立实时联系。
15.进一步地,所述中央控制单元与集成单元双向通信连接,中央控制单元可随时监测各电气部件的状态参数,同步将控制指令反馈各电气单元,进一步调整和控制飞行器的动作,以控制飞行器时刻保持最安全可靠的飞行状态。
16.进一步地,所述中央控制单元与屏显控制单元双向通信连接,屏显控制单元接收来自控制中心的关键控制参数,可实时监测各种飞行控制参数,如高度、速度(空速、飞行器速度)、航向等,便于飞行器的安全飞行和飞行员的直观操控。同时又能通过屏显装置的按钮调用相关数据、调整设定参数或进行飞行操控,进一步提升飞行操控的便利性和智能化。
17.进一步地,所述数据采集模块包括传感器和以及与传感器连接的数据分析单元。所述传感器收集相关的大气数据并传输至数据分析单元,数据分析单元结合标准大气条件下的空速、高度、总压、静压、静温或空气压缩修正量等参数,为进一步观测和控制飞行器的动作提供参考数据,并将数据传输至中央控制单元。
18.进一步地,所述传感器包括温度传感器、湿度传感器、压力传感器和速度传感器。
19.进一步地,所述飞控系统、导航系统、发动机控制系统、图传系统集成在一块电路板,优化了每个系统单独配置的电源管理和emc处理电路,减少冗余的接口电路、emc、电源等相关电路。
20.进一步地,所述屏显控制单元采用数字显示的方式对飞行参数进行显示。
21.进一步地,所述屏显装置采用整屏显示或者分屏显示,可以飞行员的视野分布特性及观测习惯,分功能区域进行逐一显示。
22.进一步地,所述电源管理单元的输入电压范围为9~36v。
23.与现有技术相比,有益效果是:
24.本实用新型通过设置统一的中央控制单元对多种不同的电气功能单元,如大气数据采集单元、飞行控制集成单元、屏显控制单元和电源管理单元的进行系统化管控,可在同一个控制平台实现监测、控制和通讯等功能,实现智能化控制、数字化显示、人机交互等功能,可靠性和功能安全等级更高,操控性也更好,同时有效提升了飞行的操作便利性和舒适性。
25.本实用新型采用一体化设计方式,完全杜绝了因传统分离电气部件通讯方式各异多带来的数据传输障碍,同时在结构设计、电气可靠性及成本管控等方面均有显著效果。
附图说明
26.图1是本实用新型结构示意图;
27.图2是本实用新型结构示意图;
28.图3是本实用新型结构示意图。
具体实施方式
29.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
30.需要说明,若本实用新型实施例中有涉及方向性指示(诸如上、下、左、右、前、后),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。若本实用新型实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
31.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
32.实施例1
33.本实施例提供一种高集成度的一体化航电控制系统,包括:
34.中央控制单元,以freescale i.mx 6quad型芯片为主控制平台,包括数据处理模块、数据存储模块和控制模块,所述数据处理模块分别与大气数据采集单元和集成单元连接,接收大气数据采集单元和集成单元的信号数据,并计算出飞行器的飞行状态及需要调整的飞行参数,将处理好的相关数据分别传输至数据储存单元和控制模块,控制模块可随时监测各单元系统部件的状态参数,同步将控制指令反馈各电气单元,进一步调整和控制飞行器的动作,以控制飞行器时刻保持最安全可靠的飞行状态。
35.大气数据采集单元,包括与中央控制单元连接的数据采集模块,所述数据采集模块包括温度传感器、湿度传感器、压力传感器和速度传感器和与各传感器连接的数据分析单元。所述传感器收集相关的大气数据并传输至数据分析单元,数据分析单元结合标准大气条件下的空速、高度、总压、静压、静温或空气压缩修正量等参数,并将数据传输至中央控制单元,为进一步观测和控制飞行器的动作提供参考数据。
36.集成单元,包括飞控系统、导航系统、发动机控制系统、图传系统,所述飞控系统、导航系统、发动机控制系统、图传系统分别与中央控制系统连接,各系统通过线束和连接器
与中央控制单元进行连接和信息交互。
37.屏显控制单元,包括与中央控制单元连接的主机,与主机连接屏显装置,主机接收来自中央控制单元的关键控制参数,并将关键指标与最佳航线通过屏显控制单元直观显示出来。
38.电源管理单元,分别与中央控制单元、大气数据采集单元、飞行控制集成单元和屏显控制单元,稳定输出9~36v的电压。
39.实施例2
40.本实施例提供一种高集成度的一体化航电控制系统,包括:
41.中央控制单元,以freescale i.mx 6quad型芯片为主控制平台,包括数据处理模块、数据存储模块和控制模块,所述数据处理模块分别与大气数据采集单元和集成单元连接,接收大气数据采集单元和集成单元的信号数据,并计算出飞行器的飞行状态及需要调整的飞行参数,将处理好的相关数据分别传输至数据储存单元和控制模块,控制模块可随时监测各单元系统部件的状态参数,同步将控制指令反馈各电气单元,进一步调整和控制飞行器的动作,以控制飞行器时刻保持最安全可靠的飞行状态。
42.大气数据采集单元,包括与中央控制单元连接的数据采集模块,所述数据采集模块包括温度传感器、湿度传感器、压力传感器和速度传感器和与各传感器连接的数据分析单元。所述传感器收集相关的大气数据并传输至数据分析单元,数据分析单元结合标准大气条件下的空速、高度、总压、静压、静温或空气压缩修正量等参数,并将数据传输至中央控制单元,为进一步观测和控制飞行器的动作提供参考数据。
43.集成单元,包括飞控系统、导航系统、发动机控制系统、图传系统,所述飞控系统、导航系统、发动机控制系统、图传系统分别与中央控制系统连接,各系统通过线束和连接器与中央控制单元进行连接和信息交互。
44.屏显控制单元,包括与中央控制单元连接的主机,与主机连接屏显装置,主机接收来自中央控制单元的关键控制参数,并将关键指标如高度、速度(空速、飞行器速度)、航向等采用数字显示的方式对飞行参数进行显示,与最佳航线通过屏显控制单元直观显示出来,便于飞行器的安全飞行和飞行员的直观操控。同时又能通过屏显装置的按钮调用相关数据或调整设定参数。
45.故障诊断单元,所述故障诊断单元与中央控制单元连接,结合故障诊断单元采集到集成单元的各系统的关键控制参数,再与既存数据库中的正常参数进行对比分析,同步将分析后的结果反馈至控制中心进行再次确认,然后将相应的故障代码传输至屏显控制单元,以便于及时了解飞行器的工作状态并采取相应的安全控制措施。
46.电源管理单元,分别与中央控制单元、大气数据采集单元、飞行控制集成单元和屏显控制单元,稳定输出9~36v的电压。
47.实施例3
48.本实施例提供一种高集成度的一体化航电控制系统,包括:
49.中央控制单元,以freescale i.mx 6quad型芯片为主控制平台,包括数据处理模块、数据存储模块和控制模块,所述数据处理模块分别与大气数据采集单元和集成单元连接,接收大气数据采集单元和集成单元的信号数据,并计算出飞行器的飞行状态及需要调整的飞行参数,将处理好的相关数据分别传输至数据储存单元和控制模块,控制模块可随
时监测各单元系统部件的状态参数,同步将控制指令反馈各电气单元,进一步调整和控制飞行器的动作,以控制飞行器时刻保持最安全可靠的飞行状态。
50.大气数据采集单元,包括与中央控制单元连接的数据采集模块,所述数据采集模块包括温度传感器、湿度传感器、压力传感器和速度传感器和与各传感器连接的数据分析单元。所述传感器收集相关的大气数据并传输至数据分析单元,数据分析单元结合标准大气条件下的空速、高度、总压、静压、静温或空气压缩修正量等参数,并将数据传输至中央控制单元,为进一步观测和控制飞行器的动作提供参考数据。
51.集成单元,构建于一块电路板,包括飞控系统、导航系统、发动机控制系统、图传系统,所述飞控系统、导航系统、发动机控制系统、图传系统分别与中央控制系统连接,各系统通过线束和连接器与中央控制单元进行连接和信息交互。
52.屏显控制单元,包括与中央控制单元连接的主机,与主机连接屏显装置,主机接收来自中央控制单元的关键控制参数,并将关键指标如高度、速度(空速、飞行器速度)、航向等采用数字显示的方式对飞行参数进行显示,与最佳航线通过屏显控制单元直观显示出来,便于飞行器的安全飞行和飞行员的直观操控。同时又能通过屏显装置的按钮调用相关数据或调整设定参数。
53.故障诊断单元,所述故障诊断单元与中央控制单元连接,结合故障诊断单元采集到集成单元的各系统的关键控制参数,再与既存数据库中的正常参数进行对比分析,同步将分析后的结果反馈至控制中心进行再次确认,然后将相应的故障代码传输至屏显控制单元,以便于及时了解飞行器的工作状态并采取相应的安全控制措施。
54.tbox单元,所述中央控制单元与tbox单元,用于航电系统运行过程中的各数据存储以及与地面控制系统建立实时联系。
55.电源管理单元,分别与中央控制单元、大气数据采集单元、飞行控制集成单元和屏显控制单元,稳定输出9~36v的电压。
56.显然,本实用新型的上述实施例仅仅是为清楚地说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1