一种智能座椅控制电路的制作方法
1.本技术涉及智能座椅技术领域,具体涉及一种智能座椅控制电路。
背景技术:
2.随着汽车行业的发展,人们越来越重视驾驶和乘坐汽车的主观感受,对汽车座椅要求也越来越高,由初始的座椅安全性要求过渡到座椅基本使用功能要求,再提升到座椅舒适性功能配置要求,因此在保证座椅外观的前提下,将多种功能件组合装配在座椅有限空间内的要求进一步提升。
3.现有市场上有不少汽车座椅具有腰托、按摩等多个功能,但或多或少因功能件布置不合理造成座椅功能效果不理想,甚至乘坐舒适性降低等不足。
技术实现要素:
4.针对现有技术的缺陷,本技术提供一种智能座椅控制电路,具体地,包括:
5.电能转换电路,于使能信号的作用下用以形成第一预定电压的电路,
6.控制电路,连接所述电能转换电路,用以接收外部输入的控制信号,于所述控制信号的作用下形成驱动信号、与所述控制信号匹配的控制指令输出;
7.指令形成电路,用以接收所述控制指令,根据所述控制指令形成第一控制命令和第二控制命令;
8.驱动电路,用以接收所述驱动信号,根据所述驱动信号形成一驱动指令输出;
9.执行电路,于所述驱动指令和控制指令的作用下,执行与所述驱动指令和控制指令匹配的动作。
10.优选地,上述的一种智能座椅控制电路,其中,
11.所述电能转换电路至少包括转换芯片,所述转换芯片的en端连接一使能电路;
12.所述使能电路一三极管控制电路,所述三极管控制电路的基极连接所述使能信号输出端,所述三极管控制电路的集电极连接一5v电压信号,所述三极管控制电路的发射极通过一上拉电阻接地,其中所述三极管控制电路的发射极形成所述使能电路的输出端。
13.优选地,上述的一种智能座椅控制电路,其中,所述控制电路由控制芯片形成,所述控制芯片的部分用以接收外部输入的控制信号,用以根据所述控制信号形成相应的输出信号。
14.优选地,上述的一种智能座椅控制电路,其中,所述驱动电路具体包括第一驱动支路和第二驱动支路,所述驱动指令包括第一驱动命令和第二驱动命令,所述第一驱动支路用以形成第一驱动命令,所述第二驱动支路用以形成第二驱动命令。
15.优选地,上述的一种智能座椅控制电路,其中,所述指令形成电路包括第一指令电路和第二指令电路。
16.优选地,上述的一种智能座椅控制电路,其中,所述执行电路至少气泵控制电路,所述气泵控制电路包括气泵控制芯片,所述气泵控制芯片的第一引脚连接所述控制芯片的
第二引脚,所述气泵控制芯片的第二引脚连接所述控制芯片的第三引脚,所述气泵控制芯片的第四引脚连接所述控制芯片的第四引脚,所述控制信号的第二、三、四引脚用以输出驱动气泵的启动驱动信号,所述气泵控制信号根据第一、二、四引脚输入的信号型号气泵控制信号通过第7引脚输出。
17.优选地,上述的一种智能座椅控制电路,其中,所述执行电路还包括电磁阀控制电路,所述电磁阀控制电路包括6个联动控制阀,分别为控制阀p2、控制阀p3、控制阀p4、控制阀p5、控制阀p6、控制阀p7,所述控制阀p3的第二端口连接第二驱动芯片的第15引脚、所述控制阀p3的第三端口连接第二驱动芯片的第16引脚,所述控制阀p4的第二端口连接第二驱动芯片的第13引脚、所述控制阀p4的第三端口连接第二驱动芯片的第14引脚,所述控制阀p5的第二端口连接第二驱动芯片的第11引脚、所述控制阀p5的第三端口连接第二驱动芯片的第12引脚,所述控制阀p6的第二端口连接第一驱动芯片的第16引脚、所述控制阀p6的第三端口连接第一驱动芯片的第16 引脚,所述控制阀p7的第二端口连接第一驱动芯片的第13引脚、所述控制阀p7的第三端口连接第一驱动芯片的第14引脚。
18.与现有技术相比,本技术的有益效果是:
19.通过接收外部输入的控制信号,根据所述控制信号形成驱动信号、控制指令等,基于驱动信号、控制指令以实现肩托、侧翼支撑、胯托、腰托、背部气袋、坐垫气袋的充放气。
附图说明
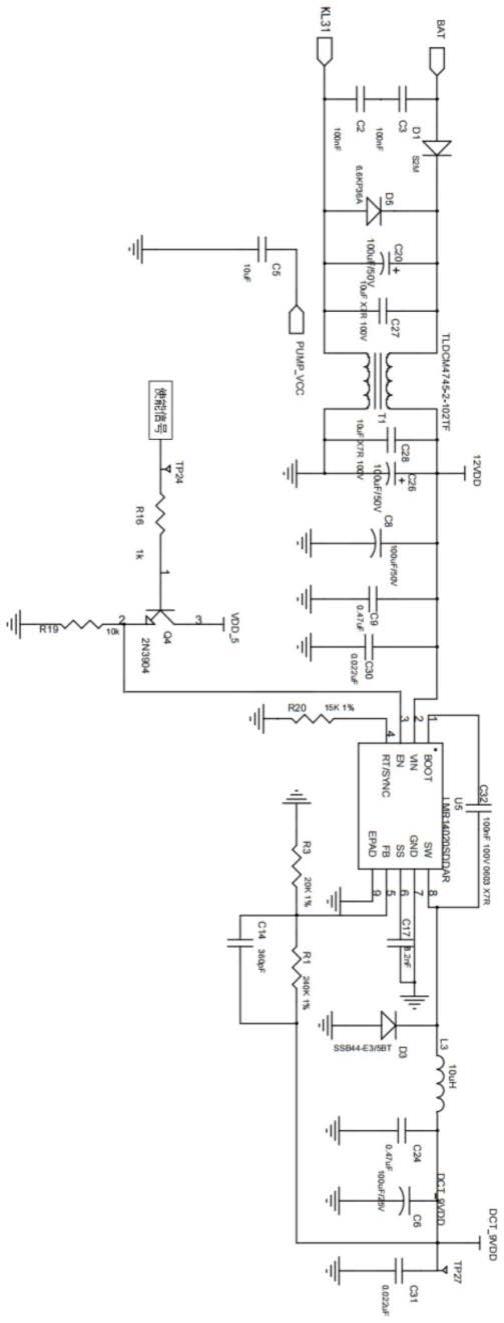
20.图1为本实用新型提供的一种智能座椅控制电路的部分电路图;
21.图2为本实用新型提供的一种智能座椅控制电路的部分电路图;
22.图3a为本实用新型提供的一种智能座椅控制电路的部分电路图;
23.图3b为本实用新型提供的一种智能座椅控制电路的部分电路图;
24.图4a为本实用新型提供的一种智能座椅控制电路的部分电路图;
25.图4b为本实用新型提供的一种智能座椅控制电路的部分电路图;
26.图5为本实用新型提供的一种智能座椅控制电路的部分电路图;
27.图6为本实用新型提供的一种智能座椅控制电路的部分电路图。
具体实施方式
28.本实用新型涉及一种智能座椅控制电路。具体地:
29.一种智能座椅控制电路,包括:
30.电能转换电路,于使能信号的作用下用以形成第一预定电压的电路,所述第一预定电压可为9v,所述第一预定电压的最大值可为9.8v、 2.5a。
31.控制电路,连接所述电能转换电路,用以接收外部输入的控制信号,于所述控制信号的作用下形成驱动信号、与所述控制信号匹配的控制指令输出;
32.指令形成电路,用以接收所述控制指令,根据所述控制指令形成第一控制命令和第二控制命令;
33.驱动电路,用以接收所述驱动信号,根据所述驱动信号形成一驱动指令输出;
34.执行电路,于所述驱动指令和控制指令的作用下,执行与所述驱动指令和控制指令匹配的动作。
35.作为进一步优选实施方案,上述的电能转换电路如图1所示,所述电能转换电路至少包括转换芯片,所述转换芯片的型号为 lmr14020sddar,所述转换芯片的en端连接一使能电路。
36.所述使能电路连接三极管控制电路,所述三极管控制电路的基极连接所述使能信号输出端,所述三极管控制电路的集电极连接一5v 电压信号,所述三极管控制电路的发射极通过一上拉电阻接地,其中所述三极管控制电路的发射极形成所述使能电路的输出端。
37.于所述使能信号为高电平信号的状态下,所述三极管控制电路处于导通状态,所述发射极通过上拉电阻形成一高电平信号输入至所述转换芯片,此时所述转换芯片处于工作状态,所述转换芯片将经过滤波处理的12v电压转化为9v电压输出。进一步地,所述电能转换电路还包括一共模抑制电路,所述共模抑制电路由tldm4745-2-102tf 电感,所述共模抑制电路住在抑制开关电源中过滤共模的电磁干扰信号和emi滤波的作用。
38.作为进一步优选实施方案,上述的控制电路如图2所示,所述控制电路由控制芯片形成,所述控制芯片的型号为
39.pic16f15385t-i/mv,所述控制芯片的第18引脚、第19引脚用以接收外部输入的控制信号,用以根据所述控制信号形成相应的输出信号,第20引脚,第23引脚,第1引脚、第2引脚、第3引脚、第4引脚的作用,第34~47引脚用以输出驱动信号。
40.如图3所示,驱动电路具体包括第一驱动支路和第二驱动支路,所述驱动指令包括第一驱动命令和第二驱动命令,所述第一驱动支路用以形成第一驱动命令,所述第二驱动支路用以形成第二驱动命令。
41.如下图4a所示,所述第一驱动支路包含第一驱动芯片,其中,所述第一驱动芯片的第1引脚连接连接所述控制芯片的第47引脚,所述第一驱动芯片的第2引脚连接连接所述控制芯片的第46引脚,所述第一驱动芯片的第3引脚连接连接所述控制芯片的第45引脚,所述第一驱动芯片的第4引脚连接连接所述控制芯片的第44引脚,所述第一驱动芯片的第5引脚连接连接所述控制芯片的第43引脚,所述第一驱动芯片的第6引脚连接连接所述控制芯片的第42引脚,所述第一驱动芯片的第7引脚连接连接所述控制芯片的第41引脚,第二驱动芯片的第10引脚至第16引脚用以输出第一驱动指令。
42.如下图4b所示,所述第二驱动支路包含第二驱动芯片,所述第二驱动芯片的第1引脚连接连接所述控制芯片的第40引脚,所述第一驱动芯片的第2引脚连接连接所述控制芯片的第39引脚,所述第一驱动芯片的第3引脚连接连接所述控制芯片的第38引脚,所述第一驱动芯片的第4引脚连接连接所述控制芯片的第37引脚,所述第一驱动芯片的第5引脚连接连接所述控制芯片的第36引脚,所述第一驱动芯片的第6引脚连接连接所述控制芯片的第35引脚,所述第一驱动芯片的第7引脚连接连接所述控制芯片的第34引脚,第二驱动芯片的第10引脚至第16引脚用以输出第一驱动指令。所述指令形成电路包括第一指令电路和第二指令电路,其中第一指令是作为lin从机接收控制电路发来的lin指令,第二指令是内部通讯的指令。
43.如图5所示,所述指令形成电路包括第一指令电路和第二指令电路,所述执行电路至少包括气泵控制电路和电磁阀控制电路,如图5 所示,所述气泵控制电路包括气泵控制芯片,所述气泵控制芯片的型号可为vn7140as,所述气泵控制芯片的第一引脚连接所述控制芯片的第二引脚,所述气泵控制芯片的第二引脚连接所述控制芯片的第三引脚,所述气
泵控制芯片的第四引脚连接所述控制芯片的第四引脚,所述控制信号的第二、三、四引脚用以输出驱动气泵的启动驱动信号,所述气泵控制信号根据第一、二、四引脚输入的信号型号气泵控制信号通过第7引脚输出。
44.如图6所示,所述电磁阀控制电路包括至少两个控制阀联动支路,示意性地,图5中包含6个联动控制阀,分别为控制阀p2、控制阀p3、控制阀p4、控制阀p5、控制阀p6、控制阀p7,所述控制阀p3的第二端口连接第二驱动芯片的第15引脚、所述控制阀p3的第三端口连接第二驱动芯片的第16引脚,所述控制阀p4的第二端口连接第二驱动芯片的第13引脚、所述控制阀p4的第三端口连接第二驱动芯片的第14引脚,所述控制阀p5的第二端口连接第二驱动芯片的第11引脚、所述控制阀p5的第三端口连接第二驱动芯片的第12 引脚,所述控制阀p6的第二端口连接第一驱动芯片的第16引脚、所述控制阀p6的第三端口连接第一驱动芯片的第16引脚,所述控制阀 p7的第二端口连接第一驱动芯片的第13引脚、所述控制阀p7的第三端口连接第一驱动芯片的第14引脚。
45.于所述第一驱动指令和/或第二驱动指令的作用下驱动电磁阀工作于不同状态,所述电磁阀工作于导通状态下,该路气路处于导通状态,气泵输出的气体可以通过该气路传输至气袋内,所述电磁阀工作于不导通状态下,该路气路处于截止状态,气泵输出的气体可以通过该气路无法传输至气袋内。
46.需要说明的是,每个电磁阀控制电路控制不同区域,例如肩托、侧翼支撑、胯托、腰托、背部支撑、坐垫气袋等,都可以通过不同的电磁阀控制电路进行控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1