双轴同步运动装置的制作方法
本技术涉及双轴同步控制,特别地涉及一种双轴同步运动装置。
背景技术:
1、传统的单轴驱动方案因瞬时驱动力易产生振动而降低设备的加工精度,且很难提供相对成本低或足够大的驱动力,为满足高速高精密数控加工要求,冗余龙门平台较单轴驱动方案可以使系统获得更大的推力、结构刚度以及更高的控制频宽。同时双驱结构对称,因不平衡负载而产生的额外弯矩在丝杠上有互相抵消作用,具有有效抑制高速机器振动、延长丝杠使用寿命、提升系统响应、提高系统刚度等优点。尽管两个进给轴上的传动部件相同,但冗余驱动及轴间强机械耦合结构特点,在高速运行中也难免会出现运动的不一致情况,导致移动部件的扭斜,直观上体现冗余电机的协调机制不当常常造成滚珠的挤压变形,导致两个执行器运动过程中不同步现象,破坏同步精度,其将直接影响冗余驱动轴的控制精度。因此提出一种能够保证冗余龙门同步性的龙门同步控制方法是保证加工精度的关键。
2、一种龙门控制方法,公开了首先将两组动力机构划分为主动力机构和从动力机构;然后将主驱动器的分频输出接口和从驱动器全闭环接口连接,将主驱动器的全闭环接口和从驱动器的分频输出接口连接;二、通过龙门控制器将主驱动器设置为龙门同步主机,主驱动器的分频输出来源设置为位置指令输出;将从驱动器设置为龙门同步从机,从驱动器的分频输出来源设置为正常分频输出,位置指令选择设置成第二编码器输入;在龙门控制器内设置位置偏差阈值;三、转矩环控制从伺服电机运动,主驱动器实时读取主伺服电机从伺服电机的位置信号和速度信号,得出主伺服电机和从伺服电机的位置与速度差值,然后输出速度与转矩补偿指令。
3、一种基于激光位移传感器的控制方法,公开了所述装置包括双轴同步运动控制装置本体、位移检测系统和控制组件;双轴同步运动控制装置本体包括第一驱动机构、第二驱动机构、第一直线运动平台、第二直线运动平台和实验台;位移检测系统包括长距离激光位移传感器、高精度激光位移传感器、反光板、工作台、第一分度盘和第二分度盘;控制组件分别与第一驱动机构、第二驱动机构、长距离激光位移传感器和高精度激光位移传感器连接,采用激光位移传感器测得两轴的运动位置信号,输入到工控计算机中,获得控制信号输出到伺服驱动器中驱动两个伺服电机的运动,实现对装置的速度和位置的双闭环控制。
4、一种双轴控制装置及方法,包括同轴同步运动本体部分及驱动检测控制部分,采用拉压力传感器及加速度传感器检测两轴的运动速度信号,输入到工控计算机中,获得控制信号输出到伺服驱动器中驱动两个伺服电机的运动,实现对装置的速度和位置的双闭环控制。
5、上述技术都是对伺服电机的速度环和位置环闭环控制,与电流环反馈相比,数据不准确、驱动器运算较大、动态响应慢等。
技术实现思路
1、针对现有技术中双轴结构在高速运行过程中难免会出现运动的不一致情况,导致横梁出现扭斜的情况,本技术提出了一种双轴同步运动装置,能够准确测得双轴同步误差,保证双轴驱动的同步精度,避免出现两轴运动扭斜的情况。
2、本实用新型的双轴同步控制方法,包括如下步骤:
3、分别获取第一电机和第二电机的扭矩数据并进行反馈;
4、计算获得所述第一电机和所述第二电机的扭矩差值数据;
5、若扭矩差值数据不满足预设条件,则根据所述扭矩差值数据,控制所述第一电机和/或所述第二电机以目标运行参数运行,以使所述第一电机与所述第二电机的扭矩差值满足预设条件。
6、在一个实施方式中,控制所述第一电机和/或所述第二电机以目标运行参数前,分别获取第一电机的转角和转速以及第二电机的转角和转速,根据所述扭矩差值数据,将第一电机的转角和转速以及第二电机的转角和转速分别调整到目标参数。通过本实施方式,通过获取第一电机和第二电机的转角和转速,通过控制第一电机与第二电机转角和转速,以能够响应第一电机和/或第二电机的扭矩差值达到预设条件,实现速度环的闭环控制。
7、在一个实施方式中,所述目标运行参数至少包括转速。通过本实施方式,通过控制第一电机和第二电机的转速,以使第一电机和第二电机的扭矩差值达到预设值。
8、在一个实施方式中,所述预设条件为所述第一电机与所述第二电机的扭矩差值为零。通过本实施方式,使第一电机和第二电机保持完美同步运动,当横梁的两端分别安装在第一电机和第二电机的传动结构上时,横梁对第一电机和第二电机的横向挤压作用力为零,避免横梁挤压传动结构,影响传动结构的使用寿命,同时保证横梁的平稳运行。
9、在一个实施方式中,根据所述扭矩差值数据,生成脉冲控制信号,以分别控制所述第一电机和/或所述第二电机以所述目标运行参数运行。通过本实施方式,根据获取的扭矩差值数据,生成脉冲信号,通过脉冲信号控制第一电机和第二电机的目标参数达到预设条件,实现快速响应的效果。
10、本实用新型的双轴同步控制装置,包括:
11、扭矩数据获取模块,其用于分别获取第一转轴与第二转轴的扭矩数据;
12、扭矩差值数据获取模块,其用于根据所述扭矩数据,计算获得所述第一转轴与所述第二转轴所分别连接的第一电机与第二电机的扭矩差值数据;
13、电机控制模块,其用于根据所述扭矩差值数据,控制所述第一电机和/或所述第二电机的目标运行参数,以使所述第一电机与所述第二电机的扭矩差值满足预设条件。
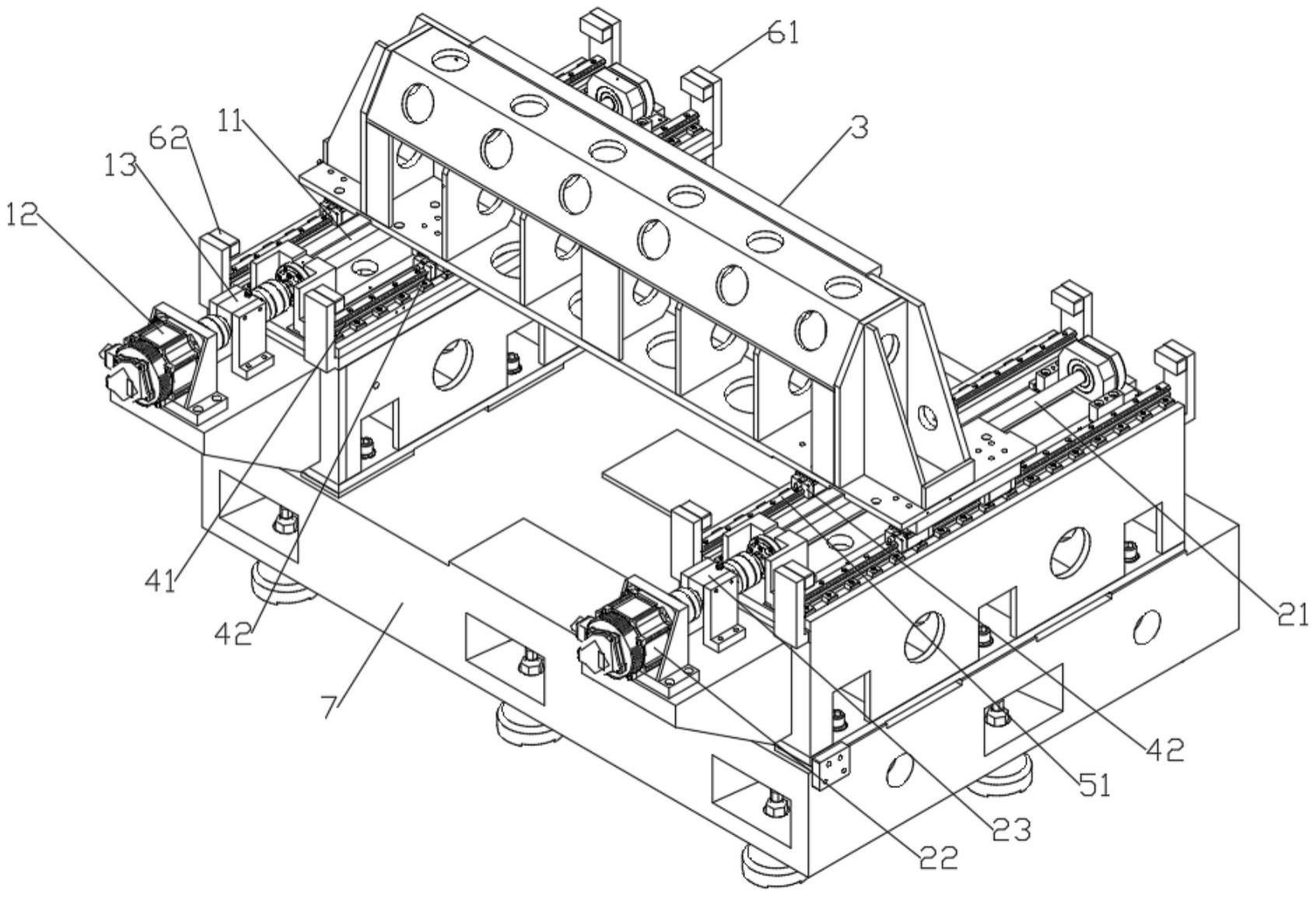
14、本实用新型的双轴同步运动装置,包括驱动组件,其包括第一驱动单元和第二驱动单元,所述第一驱动单元包括相互连接的第一转轴和第一电机,所述第二驱动单元包括相互连接的第二转轴和第二电机;
15、扭矩检测组件,其包括分别设置于所述第一转轴与所述第二转轴的第一扭矩传感器和第二扭矩传感器;
16、电机驱动组件,其包括分别设置于所述第一电机和第二电机的第一驱动器和第二驱动器,所述电机驱动组件用于根据由所述扭矩检测组件获取的扭矩数据所确定的目标运行参数驱动所述电机运行。
17、通过本实施方式,第一扭矩传感器和第二扭矩传感器分别获取第一转轴与第二转轴的扭矩信息,测量精度高、稳定性好,具有测量静态和动态扭矩、无需反复调零、可连续测量正反扭矩、采样频率高、动态响应快的优点。
18、在一个实施方式中,还包括主控制器,其分别电连接所述扭矩检测组件中的扭矩传感器和所述电机驱动组件中的驱动器。通过本实施方式,控制器用于处理第一扭矩传感器与第二扭矩传感器的信息,并能输出信号用以控制第一电机和第二电机工作,实现闭环控制。
19、在一个实施方式中,还包括信号转换器组件,其包括设置于所述第一扭矩传感器与所述主控制器之间的电连接回路上的第一信号转换器,以及设置于所述第二扭矩传感器与所述主控制器之间的电连接回路上的第二信号转换器。通过本实施方式,设置信号转换器组件,能够将第一扭矩传感器和第二扭矩传感器的模拟信号转换为数字信号,然后输出给控制器进行处理。
20、在一个实施方式中,还包括编码器组件,其包括分别设置于所述第一电机与所述第二电机的第一编码器与第二编码器。通过本实施方式,编码器组件能够用于获取第一电机和第二电机的转角和转速信息,并且在响应第一电机和第二电机扭矩差值调零的过程中,控制信号能够经编码器组件反馈给第一驱动器和第二驱动器。
21、在一个实施方式中,还包括横梁,所述横梁的两端分别与所述第一驱动单元和所述第二驱动单元相互连接。
22、在一个实施方式中,还包括分别设置于所述第一转轴和第二转轴外侧的第一直线导轨和第二直线导轨,所述第一直线导轨和第二直线导轨上均设置有滑块,所述横梁的两端分别通过滑块与所述第一直线导轨和所述第二直线导轨连接。
23、在一个实施方式中,所述第一转轴和第二转轴沿轴向的两端均设置有用于对横梁起限位的第一限位块和第二限位块。
24、在一个实施方式中,还包括底座,所述第一驱动单元和所述第二驱动单元并排地设置在底座上。
25、在一个实施方式中,所述第一驱动单元和第二驱动单元耦合连接。
26、在一个实施方式中,所述第一转轴和第二转轴的轴线相互平行。
27、上述技术特征可以各种适合的方式组合或由等效的技术特征来替代,只要能够达到本实用新型的目的。
28、本实用新型提供的一种双轴同步运动装置,与现有技术相比,至少具备有以下有益效果:
29、获取第一转轴和第二转轴的扭矩数据,控制第一电机与第二电机的扭矩差值满足预设条件,避免出现两轴运动扭斜的情况,形成转矩闭环控制,由于电机三环最内环为电流/转矩环,故而能最先响应,运算最小,恢复速度快。
- 还没有人留言评论。精彩留言会获得点赞!