一种便携式无人机飞控校准装置的制作方法
1.本实用新型涉及无人机领域,特别是涉及一种便携式无人机飞控校准装置。
背景技术:
2.无人机的飞控通常指无人机的飞行控制系统,主要由陀螺仪(飞行姿态感知)、加速计、地磁感应器、气压传感器(悬停高度粗略控制)、超声波传感器(低空高度精确控制或避障)、光流传感器(悬停水平位置精确确定)、gnss模块(水平位置高度粗略定位)以及控制电路组成。其主要功能是自动保持无人机的正常飞行姿态。
3.飞控在整个无人机系统中起着飞行大脑的作用,为保证无人机的飞行安全,在无人机在组装出厂之前需要对飞控进行校准。无人机系统的校准包括加速度计校准、磁罗盘校准(罗盘校准又包括内置罗盘校准和外置罗盘校准)、遥控器校准、电调校准、电流计校准等。
4.磁罗盘的校准一般用来处理无人机机体本身磁场对磁罗盘的影响,对于无人机外部其他磁场对磁罗盘的影响,当无人机在高空飞行时,通常会远离地面,因此地面设备的磁场对无人机磁罗盘的影响可以忽略不计。
5.加速度计是用于测量当前系统中加速度数值的传感器,用以保证水平及垂直方向的线性加速,可以分别测量x、y、z这3个轴的加速度值,相关的数据可用于计算速率、方向及无人机高度的变化率。加速度计校准的方式采用零偏(offset)和标度因数(scale)。零偏就是传感器的测量值相对于“零点”的偏移量;标度因数可以理解为一个比例系数,测量值乘以这个比例系数之后得到实际值。
6.加速度计校准,业内称为“加速度舞蹈”,飞控连接地面站软件,然后按照地面站提示,将飞控系统硬件放置在水平、左、右、下、上等分别进行各平面校准。为了提高校准精度,各个平面必须保证绝对水平,因此操作难度较大。
技术实现要素:
7.本实用新型的目的是提供一种能够易于实现各平面的水平、操作方便、适合野外使用的便携式无人机飞控校准装置。
8.为此,本实用新型采用以下技术方案:
9.一种便携式无人机飞控校准装置,包括校准平台、整平圆水准器、指南针和固定装置,其中:所述校准平台为中空的正方体框架结构,其六个面板的外表面均为平整的平面,所述底面板为实心面板,其余各面板的中部均形成开口;所述整平圆水准器在所述底面板的上表面以及其余各面板的外表面上各嵌入安装一个,且每个整平圆水准器的外表面均与其所在平面平齐;所述底面板的上表面上设置有交叉成十字形的两条中线,将所述底面板分为四等份;所述指南针嵌入安装在一条所述中线的端部,用于在罗盘校准时确定磁北方向;所述固定装置用于将飞控的硬件固定在所述底面板上,且以指南针所在的中线为中线。
10.优选的是,在所述校准平台的顶面外侧形成有一u型凹槽,以便于飞控校准时电源
线穿过,不影响面板的平整度。
11.所述校准平台与固定装置的大小与被校准的飞控系统硬件相匹配。对于不同大小的飞控系统硬件,可以通过改变正方体和弹性架子的尺寸使其与飞控系统硬件相适应。
12.在本实用新型的一个实施例中,所述固定装置为安装在所述底面板上的四个弹性夹子,所述四个弹性夹子分别用于夹住飞控系统硬件的四个角。所述固定装置还可以是其它合适的结构。还可能通过粘贴方式将其固定。
13.为减轻校准平台的重量,优选采用校准碳纤维材料来制作平台。
14.在本实用新型的一个实施例中,所述校准平台每个面板的边长均为20cm;所述整平圆水准器的直径小于3cm,所述指南针的直径小于3cm。
15.本实用新型便携式无人机飞控校准装置专门针对快速校准飞控加速度计和罗盘而设计。
16.与现有技术相比,本实用新型具有以下有益效果:
17.1.该便携式无人机飞控校准装置根据飞控系统校准的精度要求,能够很容易地实现各平面的水平,其操作简单,适合野外使用。
18.2.在该装置的平台中嵌入了指南针,在完成加速度校准后,使罗盘的校准也更加容易。
19.3.该装置体积小、携带方便。
附图说明
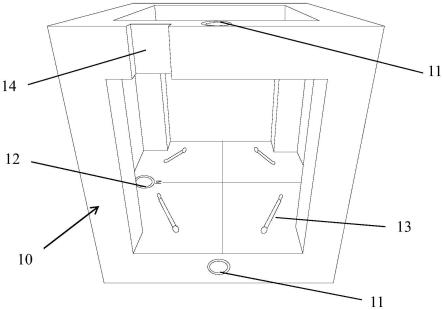
20.图1为本实用新型的便携式无人机飞控校准装置立体结构示意图;
21.图2为本实用新型便携式无人机飞控校准装置另一角度的立体结构示意图。
22.图中:
23.10.校准平台;11.整平圆水准器;12.指南针;13.弹性夹子;
24.14.u形凹槽;15.底面板
具体实施方式
25.以下结合附图和实施例对本实用新型的技术方案进行详细说明。
26.参见图1和图2,本实用新型的便携式无人机飞控校准装置包括:校准平台10、整平圆水准器11、指南针12和固定装置。
27.具体地说,所述校准平台10为中空的正方体框架结构,其六个面板的外表面均为平整的平面,底面板15为实心面板;其余各面板的中部均形成开口,为镂空框架式结构,且每个面都非常平整,以保证加速度计校准时该面能够水平放置。
28.所述整平圆水准器11在底面板的上表面以及其余各面板的外表面上各嵌入安装一个,且每个整平圆水准器的外表面均与其所在平面平齐,不影响每个面的平整度。在进行校准时,每个平面上的整平圆水准器用于该面放置水平时的整平。
29.所述底面板的上表面上设置有交叉成十字形的两条中线,将所述底面板分为四等份。所述指南针嵌入安装在一条中线的端部,用于在罗盘校准时确定磁北方向,在该条中线上还标有“n”、“s”,分别代表北极和南极方向。
30.所述固定装置用于将飞控系统硬件固定在所述底面板上,且以指南针所在的中线
为飞控系统硬件的中线。在图中所示的实施例中,所述固定装置为安装在底面板上的四个弹性夹子,这四个弹性夹子分别用于固定飞控系统硬件的四个角。
31.优选采用碳纤维材料来制作校准平台0,以保证在重量轻、易携带的前提下,校准平台的形变最小、平整度更好、校准精准度更高。当然,也可以采用其它合适的材质。
32.另外,在校准装置的顶面(与实心底面平行的面)外侧设有一个u型凹槽,用于飞控校准时电源线穿线(不影响该面的平整度)。
33.在本实用新型的一个实施例中,正方体校准平台的边长为20cm,底面为实心结构;其它面为框架式,每个柱的宽度为3cm;整平圆水准器在每个面上嵌入一个,共计6个,直径小于3cm;指南针直径小于3cm。
34.以下以加速度计校准为例,对上述便携式无人机飞控校准装置的使用方法进行说明:
35.加速度计校准时,将飞控系统硬件与地面站软件(以mission planner为例)连接,飞控系统硬件放平,箭头对向电脑屏幕,然后按照地面站提示,分别放置飞控水平、左、右、下、上、背面,同时点击地面站软件的相应功能键完成校准。具体如下:
36.(1)飞控连接地面站:连接飞控与地面站,波特率选择115200,连接成功后右上角连接标识显示绿色。点击软件界面的“初始设置\必要硬件\加速度计校准”。
37.(2)level(水平):将飞控系统硬件固定在校准平台的底面板上,放平;通过整平圆水准器将校准平台调至水平(可以借助其它支撑装置来调平;在野外操作时,也可以通过手的调整来使其水平),从而保证飞控系统硬件的水平精确度,这一步骤是后几步校准的基础,起关键作用。
38.(3)left(左):转动校准平台,使飞控系统硬件位于左侧,将校准平台放平,通过整平圆水准器将校准平台调至水平;进行校准;点击enter键完成。
39.(4)right(右):转动校准平台,使飞控系统硬件位于右侧,将校准平台放平,通过整平圆水准器将校准平台调至水平;进行校准;点击enter键完成。
40.(5)nosedown(向下):转动校准平台,使飞控系统硬件向下,将校准平台放平,通过整平圆水准器将校准平台调至水平;进行校准;点击enter键完成。
41.用同样的方法完成(6)noseup(向上)、(7)back(背面朝上)操作,最终完成加速度计校准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1