一种森林防火应急救援航空器飞行态势监测方法及系统与流程
本发明属于应急救援领域,更具体地,涉及一种森林防火应急救援航空器飞行态势监测方法及系统。
背景技术:
1、应急救援航空器主要是指执行应急救援任务的通用直升机、无人机等航空器。对应急救援航空器监视手段主要有北斗+4g定位手段、ads-b主动监视等手段,但由于应急救援航空器飞行高度低、地面监视设施部署有限,导致应急救援航空器常常进入监视盲区。特别是森林防火应急救援航空器在开展取水、灭火以及巡查起火点等业务过程中,由于航空器飞行高度超低,且多在野外,现行的监视手段更难以获取其飞行位置,考虑到应急救援航空器在取水、灭火过程中,航空器自身飞行安全风险也急剧增加,地面指挥员在不能监视到航空器情况下,将极大考验地面指挥员的指挥能力和指挥决心,给森林防火应急救援行动带来了极大困难。
2、国内的学术资料大都集中于应急救援任务规划、应急救援调度指挥等方面,很少研究森林防火应急救援航空器飞行态势构建相关技术,对基于混杂模型的森林防火应急救援航空器飞行态势构建方法更是一片空白。在基于混杂模型的森林防火应急救援航空器飞行态势构建方法方面的专利也比较少,且查找相关文献资料,大多集中于应急救援装置、应急救援任务调度等方面,未对森林防火应急救援航空器飞行态势如何构建进行研究和阐述。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提供一种森林防火应急救援航空器飞行态势监测方法及系统,旨在解决现有技术未对森林防火应急救援航空器飞行态势如何构建进行研究和阐述,无法全面监视应急救援航空器飞行位置的问题。
2、为实现上述目的,本发明提供了一种森林防火应急救援航空器飞行态势监测方法,包括如下步骤:
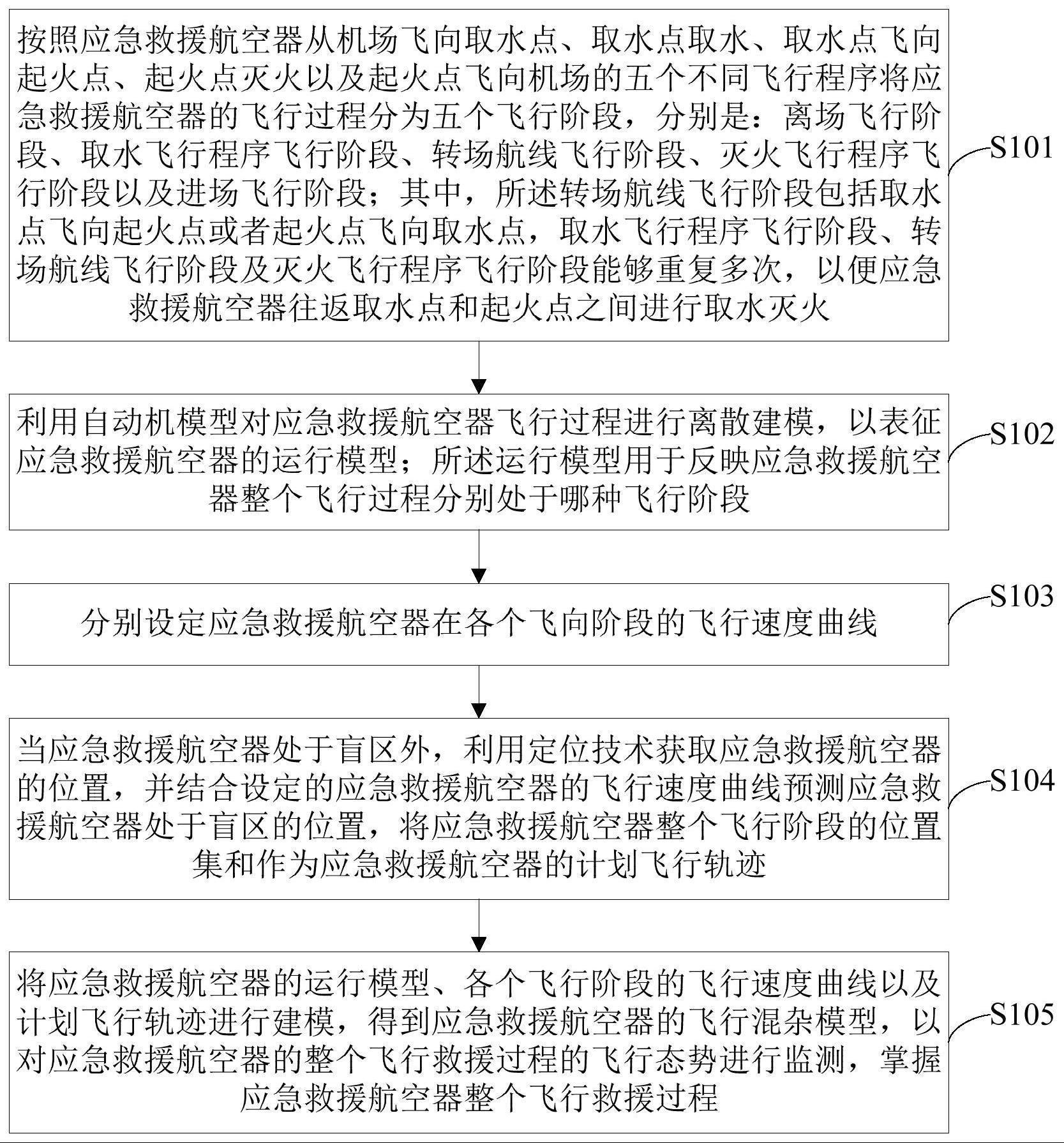
3、按照应急救援航空器从机场飞向取水点、取水点取水、取水点飞向起火点、起火点灭火以及起火点飞向机场的五个不同飞行程序将应急救援航空器的飞行过程分为五个飞行阶段,分别是:离场飞行阶段、取水飞行程序飞行阶段、转场航线飞行阶段、灭火飞行程序飞行阶段以及进场飞行阶段;其中,所述转场航线飞行阶段包括取水点飞向起火点或者起火点飞向取水点,所述取水飞行程序飞行阶段、转场航线飞行阶段及灭火飞行程序飞行阶段能够重复多次,以便应急救援航空器往返取水点和起火点之间进行取水灭火;
4、利用自动机模型对应急救援航空器飞行过程进行离散建模,以表征应急救援航空器的运行模型;所述运行模型用于反映应急救援航空器整个飞行过程分别处于哪种飞行阶段;
5、分别设定应急救援航空器在各个飞向阶段的飞行速度曲线;
6、当应急救援航空器处于盲区外,利用定位技术获取应急救援航空器的位置,并结合设定的应急救援航空器的飞行速度曲线预测应急救援航空器处于盲区的位置,将应急救援航空器整个飞行阶段的位置集和作为应急救援航空器的计划飞行轨迹;
7、将应急救援航空器的运行模型、各个飞行阶段的飞行速度曲线以及计划飞行轨迹进行建模,得到应急救援航空器的飞行混杂模型,以对应急救援航空器的整个飞行救援过程的飞行态势进行监测,掌握应急救援航空器整个飞行救援过程。
8、在一个可选的示例中,利用自动机模型对应急救援航空器飞行过程进行离散建模,具体为:
9、所述应急救援航空器的运行模型a为:a=(p,t,pre,m),其中:p={p1,p2…pi…},表示森林防火应急救援航空器各类飞行阶段,p1表示离场飞行阶段,p2表示取水飞行程序飞行阶段,pi表示应急救援航空器任意飞行阶段;t={t0~1,t1~2…ti~j…},表示应急救援航空器各飞行阶段转换触发条件,t0~1表示接到航空应急救援灭火任务;t1~2表示达到取水起始进近点;t2~3表示离开取水点;t3~4表示到达灭火起始进近点;t4~5表示离开灭火点;ti-1~i表示开始进场飞行;ti~i+1表示航空应急救援任务结束;pre表示应急救援航空器的走向;m表示应急救援航空器在应急救援各阶段的分布。
10、在一个可选的示例中,所述离场飞行阶段、转场航线飞行阶段以及进场飞行阶段的飞行速度为匀速;
11、所述取水飞行程序飞行阶段,应急救援航空器以均匀下降高度对应的速度曲线靠近水面取水;
12、所述灭火飞行程序飞行阶段,应急救援航空器以均匀下降高度对应的速度曲线靠近起火点灭火。
13、在一个可选的示例中,设c=(c1,c2,...,cj,...,cm)表示应急救援航空器计划飞行轨迹,假定应急救援航空器在盲区外利用定位技术最后获得的位置为ci(λi,μi,hi),其中λi,μi,hi分别表示应急救援航空器的经度、纬度和高度;
14、假设此时应急救援航空器飞行速度为vi(vλ,vu,vh),其中vλ,vu,vh分别表示对应的经度方向速度、纬度方向速度以及高度方向速度;
15、则应急救援航空器在t0时间后的位置为cn(λn,μn,hn),有:
16、
17、在一个可选的示例中,设jn=(a,v,c)为应急救援航空器飞行混杂模型,其中a表示应急救援航空器运行模型;v表示应急救援航空器在飞行时的飞行速度曲线集合,c表示应急救援航空器飞行时的计划飞行轨迹;
18、则应急救援航空器飞行混杂模型为:
19、
20、其中,m表示应急救援航空器在应急救援各阶段的分布,e(t)表示转换触发条件的集合;设m(pi)表示pi所代表的区域中应急救援航空器的数量,e(ti~i+1)表示一个区域向另一个区域的允许状态,当其值为1时,表示允许应急救援航空器进入下一阶段,当其值为0时,表示不允许应急救援航空器进入下一阶段;v1表示应急救援航空器离场飞行速度曲线;v2表示应急救援航空器取水飞行速度曲线;v3表示应急救援航空器转场飞行速度曲线;v4表示应急救援航空器灭火飞行速度曲线;v5表示应急救援航空器进场飞行速度曲线;c1-c5分别表示应急救援航空器离场飞行航迹位置、取水飞行程序飞行航迹位置、转场航线飞行航迹位置、灭火飞行程序飞行航迹位置以及进场飞行航迹位置。
21、第二方面,本发明提供了一种森林防火应急救援航空器飞行态势监测系统,包括:
22、飞行阶段划分单元,用于按照应急救援航空器从机场飞向取水点、取水点取水、取水点飞向起火点、起火点灭火以及起火点飞向机场的五个不同飞行程序将应急救援航空器的飞行过程分为五个飞行阶段,分别是:离场飞行阶段、取水飞行程序飞行阶段、转场航线飞行阶段、灭火飞行程序飞行阶段以及进场飞行阶段;其中,所述转场航线飞行阶段包括取水点飞向起火点或者起火点飞向取水点,所述取水飞行程序飞行阶段、转场航线飞行阶段及灭火飞行程序飞行阶段能够重复多次,以便应急救援航空器往返取水点和起火点之间进行取水灭火;
23、飞行过程建模单元,用于利用自动机模型对应急救援航空器飞行过程进行离散建模,以表征应急救援航空器的运行模型;所述运行模型用于反映应急救援航空器整个飞行过程分别处于哪种飞行阶段;
24、速度曲线设定单元,用于分别设定应急救援航空器在各个飞向阶段的飞行速度曲线;
25、飞行轨迹确定单元,用于当应急救援航空器处于盲区外,利用定位技术获取应急救援航空器的位置,并结合设定的应急救援航空器的飞行速度曲线预测应急救援航空器处于盲区的位置,将应急救援航空器整个飞行阶段的位置集和作为应急救援航空器的计划飞行轨迹;
26、飞行态势监测单元,用于将应急救援航空器的运行模型、各个飞行阶段的飞行速度曲线以及计划飞行轨迹进行建模,得到应急救援航空器的飞行混杂模型,以对应急救援航空器的整个飞行救援过程的飞行态势进行监测,掌握应急救援航空器整个飞行救援过程。
27、在一个可选的示例中,所述飞行过程建模单元利用自动机模型对应急救援航空器飞行过程进行离散建模,具体为:
28、所述应急救援航空器的运行模型a为:a=(p,t,pre,m),其中:p={p1,p2…pi…},表示森林防火应急救援航空器各类飞行阶段,p1表示离场飞行阶段,p2表示取水飞行程序飞行阶段,pi表示应急救援航空器任意飞行阶段;t={t0~1,t1~2…ti~j…},表示应急救援航空器各飞行阶段转换触发条件,t0~1表示接到航空应急救援灭火任务;t1~2表示达到取水起始进近点;t2~3表示离开取水点;t3~4表示到达灭火起始进近点;t4~5表示离开灭火点;ti-1~i表示开始进场飞行;ti~i+1表示航空应急救援任务结束;pre表示应急救援航空器的走向;m表示应急救援航空器在应急救援各阶段的分布。
29、在一个可选的示例中,所述速度曲线设定单元设定的离场飞行阶段、转场航线飞行阶段以及进场飞行阶段的飞行速度为匀速;设定的取水飞行程序飞行阶段,应急救援航空器以均匀下降高度对应的速度曲线靠近水面取水;以及设定的灭火飞行程序飞行阶段,应急救援航空器以均匀下降高度对应的速度曲线靠近起火点灭火。
30、在一个可选的示例中,所述飞行轨迹确定单元设c=(c1,c2,...,cj,...,cm)表示应急救援航空器计划飞行轨迹;其中,假定应急救援航空器在盲区外利用定位技术最后获得的位置为ci(λi,μi,hi),其中λi,μi,hi分别表示应急救援航空器的经度、纬度和高度;假设此时应急救援航空器飞行速度为vi(vλ,vu,vh),vλ,vu,vh分别表示对应的经度方向速度、纬度方向速度以及高度方向速度;则应急救援航空器在t0时间后的位置为cn(λn,μn,hn),有:
31、
32、在一个可选的示例中,飞行态势监测单元设jn=(a,v,c)为应急救援航空器飞行混杂模型,其中a表示应急救援航空器运行模型;v表示应急救援航空器在飞行时的飞行速度曲线集合,c表示应急救援航空器飞行时的计划飞行轨迹;则应急救援航空器飞行混杂模型为:
33、
34、其中,m表示应急救援航空器在应急救援各阶段的分布,e(t)表示转换触发条件的集合;设m(pi)表示pi所代表的区域中应急救援航空器的数量,e(ti~i+1)表示一个区域向另一个区域的允许状态,当其值为1时,表示允许应急救援航空器进入下一阶段,当其值为0时,表示不允许应急救援航空器进入下一阶段;v1表示应急救援航空器离场飞行速度曲线;v2表示应急救援航空器取水飞行速度曲线;v3表示应急救援航空器转场飞行速度曲线;v4表示应急救援航空器灭火飞行速度曲线;v5表示应急救援航空器进场飞行速度曲线;c1-c5分别表示应急救援航空器离场飞行航迹位置、取水飞行程序飞行航迹位置、转场航线飞行航迹位置、灭火飞行程序飞行航迹位置以及进场飞行航迹位置。
35、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
36、本发明提供一种森林防火应急救援航空器飞行态势监测方法及系统,构建应急救援航空器的飞行混杂模型,对应急救援航空器的整个飞行救援过程的飞行态势进行监测;增强指挥员的情境意识和减少指挥差错,飞行态势信息重建后,指挥员能够更为直观在指挥系统显示界面上观测到整个森林防火航空应急救援的过程,随时掌握空中目标的飞行态势,提升森林防火应急救援航空器飞行安全度。
- 还没有人留言评论。精彩留言会获得点赞!