一种异构多智能体系统的数据驱动输出同步方法
本发明属于多智能体系统协同控制,尤其涉及一种异构多智能体系统的数据驱动输出同步方法。
背景技术:
1、随着融合了通信工程、控制科学、生物/人工智能等不同领域的信息控制技术的迅猛发展,作为分布式信息控制技术的核心载体,多智能体系统在工业、军事和民用等不同领域内的研究不断被推进,特别是多智能体系统协同控制,以其广泛的应用背景,成为控制领域的热点研究问题。在民用领域中,以智能制造为例,通过合理的协同控制可以实现多机械臂协同装配、复杂生产线协同调度、多移动机器人协同搬运等,以此加快制造效率、减小制造规模、提升智能化水平。
2、此外,在实际应用中,面对复杂的任务需求,多智能体系统需包含拥有不同动态特性的智能体,因此对异构多智能体系统输出同步的研究,不仅能涵盖同构系统的协同问题,同时可以解决不同智能平台混合的多智能体系统的协同问题。因此,异构多智能体系统输出同步问题以其理论和实际应用价值引起了广泛学者的关注。
3、然而,值得一提的是,目前关于异构多智能体系统输出同步问题的研究大部分使用的是基于模型的控制方法,即控制策略的设计依赖显式系统模型。考虑到实际应用中不仅普遍存在系统精准的物理模型获取困难的情况,如第一原理不再适用、系统辨识结果不够准确等,还存在得到的物理模型过于复杂而无法使用的情况。而系统模型的缺失还会导致一系列控制难题,如智能制造过程中生产线模型缺失会导致协同调度、生产难等问题。因此,亟需一种不需要系统精确模型的端到端的控制方法以解决上述问题。近年来,数据驱动控制方法应运而生,即仅利用数据来实现对未知系统的控制与分析,并且不需要借助于任何中间步骤估计系统模型,如系统辨识。目前,广大学者已经针对单个未知系统的数据驱动控制开展了深入而详细的研究,但是目前尚未有研究未知异构多智能体系统的输出同步控制。为此,考虑不同类型智能体间的结构和动态性能带来的差异,提供一种能够解决未知系统模型的异构多智能体系统输出同步问题的方法,成为本领域亟待解决的一个技术难题。
技术实现思路
1、针对上述问题,本发明针对不同类型智能体间的结构和动态性能带来的差异,提出了一种异构多智能体系统的数据驱动输出同步方法,实现未知系统模型的异构多智能体系统的有界输出一致。
2、本发明的技术解决方案是:
3、一种异构多智能体系统的数据驱动输出同步方法,包括步骤:
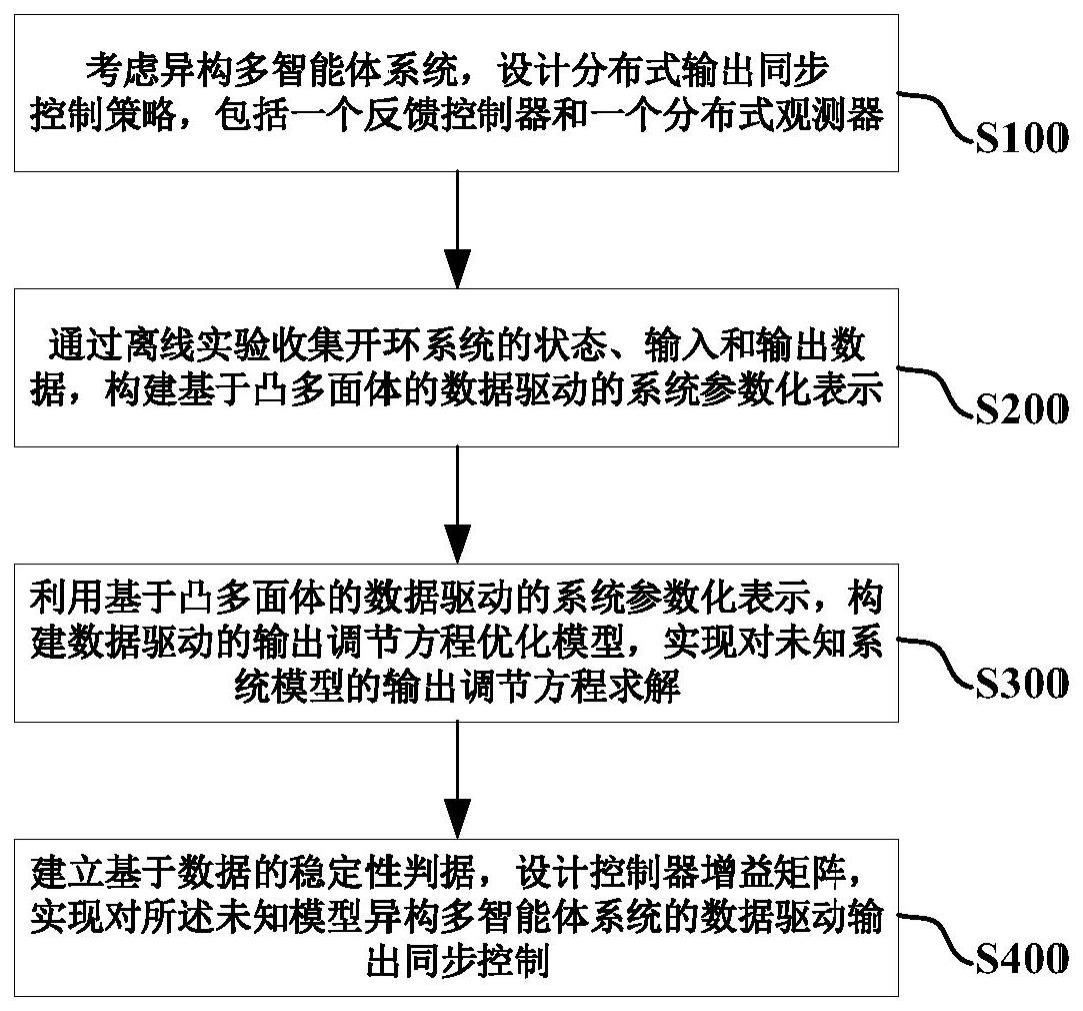
4、s100,设计异构多智能体系统的分布式输出同步控制策略,包含一个反馈控制器和一个分布式观测器,
5、s200,通过离线实验收集开环系统的状态数据、输入数据和输出数据,构建基于凸多面体的数据驱动的系统参数化表示;
6、s300,利用步骤s200构建的基于凸多面体的数据驱动的系统参数化表示,构建数据驱动的输出调节方程优化模型,实现对未知系统模型的输出调节方程的求解;
7、s400,根据步骤s100设计的分布式输出同步控制策略和步骤s200构建的系统参数化表示,建立基于数据的稳定性判据,设计控制器增益矩阵,并根据步骤s300输出调节方程的解,实现对所述未知模型异构多智能体系统的数据驱动输出同步控制。
8、针对步骤s100,异构多智能体系统由n个跟随智能体和1个领导智能体构成,其中每个跟随智能体的动力学模型为:
9、xi(t+1)=aixi(t)+biui(t),i=1,2,…,n,
10、yi(t)=cixi(t)
11、其中,和yi(t)∈rq分别表示跟随智能体i的状态、控制输入和测量输出。系统矩阵是恒定的和未知的;
12、此外,领导智能体的动力学模型为
13、x0(t+1)=sx0(t)
14、y0(t)=hx0(t)
15、其中,和y0(t)∈rq分别为领导智能体的状态和输出;矩阵和是已知的。假设矩阵对(ai,bi)是可镇定的,(ci,ai)是可检测的,(s,h)是可观测的,并且s的所有极点都在单位圆上或其内部。系统中各智能体之间的通信网络包含一个以领导智能体为根节点的有向生成树g。
16、进一步,s100中所述布式输出同步控制策略,包含一个反馈控制器和一个分布式观测器,具体设计如下:
17、s111,反馈控制器设计为:
18、ui(t)=ki(xi(t)-πiηi(t))+γiηi(t)
19、其中,为对领导者的状态估计,为待设计的反馈增益矩阵,和是下述输出调节方程的解:
20、aiπi+biγi=πis
21、ciπi=h
22、s112,分布式观测器设计如下:
23、
24、其中,di和gi分别是跟随智能体i的入度和牵制增益,是待确定的增益矩阵,aij是邻接矩阵的第i行、第j列的元素。
25、针对步骤s200,所述的基于凸多面体的数据驱动的系统参数化表示的构建步骤为:
26、s211,在时间间隔t∈{0,1,…,ρ}内,多智能体系统的状态数据、输入数据和输出数据由下述受干扰的开环系统通过离线实验测量得到:
27、xi(t+1)=aixi(t)+biui(t)+wi(t)
28、yi(t)=cixi(t)+vi(t)
29、其中,和vi(t)∈rq为有界的未知扰动,并通过下述凸多面体和对未知的噪声上界加以限制:
30、
31、
32、其中,和分别为凸多面体和的顶点。
33、s212,将预先收集的每个跟随智能体i数据集合过程噪声和输出噪声数据按如下方式堆叠以形成矩阵:
34、
35、
36、
37、s213,过程噪声矩阵wi满足由多个扰动凸多面体拼接而成的集合即
38、
39、其中,k={1,2,…,γw,i},m={2,3,…,ρ-1},i=1,2,…,n。同样,对于输出噪声vi满足集合即
40、
41、s214,定义能够解释所有跟随智能体i的数据(ui,xi,xi+,yi)的所有系统矩阵ai,bi,ci所在的集合为
42、
43、由此,假设矩阵对于每个智能体i=1,2,…,n都是满行秩的。那么,基于凸多面体的数据驱动的系统参数化表示构造为:
44、
45、针对步骤s300,所述的数据驱动的输出调节方程优化模型,具体为:
46、
47、其中,πi和γi是待求解的矩阵,和表示以原点为中心的约束求解误差的凸多面体,表示frobenius范数。约束和表示将由数据存在的噪声所导致的输出调节方程的求解误差分别限制在凸多面体和内。由此,上述优化模型的可行解即为在误差尽可能小的情况下的输出调节方程的解πi和γi。也就是说,利用上述优化模型的可行解,输出调节方程被改写为:
48、
49、其中,和
50、针对步骤s400,所述基于数据的稳定性判据和控制器增益矩阵,具体为:
51、考虑所述的拓扑图g和异构多智能体系统,对于所有和i=1,2...,n,收集数据中的过程噪声和测量噪声分别满足和利用所述数据驱动的输出调节方程优化模型的解πi和γi,如果存在矩阵f满足s-λif是schur稳定的,和半定规划问题(sdp)存在可行解mi。那么,对于任何初始状态,在所述的分布式输出同步控制策略的作用下,网络中所有跟随智能体的输出均可以有界跟踪上领导智能体的输出。此外,控制器增益矩阵设计为ki=uimi(ximi)-1。
52、半定规划问题(sdp)为:
53、ximi-ωimi(ximi)-1(ωimi)t>0,
54、ximi>0,
55、其中,λi是矩阵(in+d+g)-1(l+g)的特征值,g=diag(g1,g2,...,gn),
56、有益效果
57、(1)本发明的方法,解决了有向通信拓扑下,未知模型的异构多智能体系统输出同步问题。
58、(2)本发明的方法,设计了一种分布式输出同步控制策略,包含一个反馈控制器和一个分布式观测器;进一步,利用离线收集的状态、输入和输出数据,构建基于凸多面体的数据驱动的系统参数化表示;然后,利用该参数化表示,构建数据驱动的输出调节方程优化模型,实现对未知系统模型的输出调节方程的求解。
59、(3)本发明的方法,建立基于数据的稳定性判据,设计基于数据的控制器增益矩阵,实现了所有跟随智能体输出有界跟踪上领导智能体输出。
60、(4)本发明的方法,提出了基于凸多面体的数据驱动的系统参数化表示构建方法;构建了数据驱动的输出调节方程优化模型,有效解决了数据受干扰情况下的位置系统模型的输出调节方程求解问题,并具有很好的鲁棒性;
61、(5)本发明的方法,提供了一种仅利用状态、输入和输出数据设计输出反馈控制器的数据驱动方法,消除了传统控制对系统模型的依赖,有效解决了针对未知异构多智能体系统的输出同步问题。
62、(6)本发明公布了一种异构多智能体系统的数据驱动输出同步方法。首先,针对未知系统矩阵的异构多智能体系统,本方案利用收集到的受未知有界扰动的状态、输入和输出数据,提出了一种基于凸多面体的数据驱动的系统参数化表示;其次,利用该参数化表示,构建了数据驱动的输出调节方程优化模型,实现对未知系统模型的输出调节方程的求解;最后,本方案提供了一种仅利用数据设计控制器的方法,消除了传统控制对系统模型的依赖,解决了有向通信拓扑下,未知模型的异构多智能体系统输出同步问题。
- 还没有人留言评论。精彩留言会获得点赞!