多轴同步运动控制方法、装置及计算机可读存储介质与流程
【】本发明涉及影像测量,尤其涉及多轴同步运动控制方法、装置及计算机可读存储介质。
背景技术
0、
背景技术:
1、在现代大型装备生产制造过程中,高精度、高稳定度和高速的要求,已经是设备竞争的关键因素之一。由于大型装备的重量重、体积大等特殊原因,使其利用单轴的托举系统无法完成移动需求,为了满足该类装备的移动,在机械结构上采用了主动双轴设计,利用双轴丝杆带动移动臂烟导轨移动,从而使该移动臂带动装备移动。
2、机械双轴的导轨及丝杆,因各种情况,在制造过程中,不可避免的会产生精度偏差,致使在伺服电机相同数量脉冲下,移动距离也不相等。轻者会使运送的物体产生位置和角度偏差,影响后续的处理;重者会造成丝杆和导轨等设备的损坏。
技术实现思路
0、
技术实现要素:
1、本发明的目的在于提供一种多轴同步运动控制方法、装置及计算机可读存储介质,以解决上述技术问题。
2、为了达到上述目的,本发明的第一方面提供了一种多轴同步运动控制方法,所述方法包括:
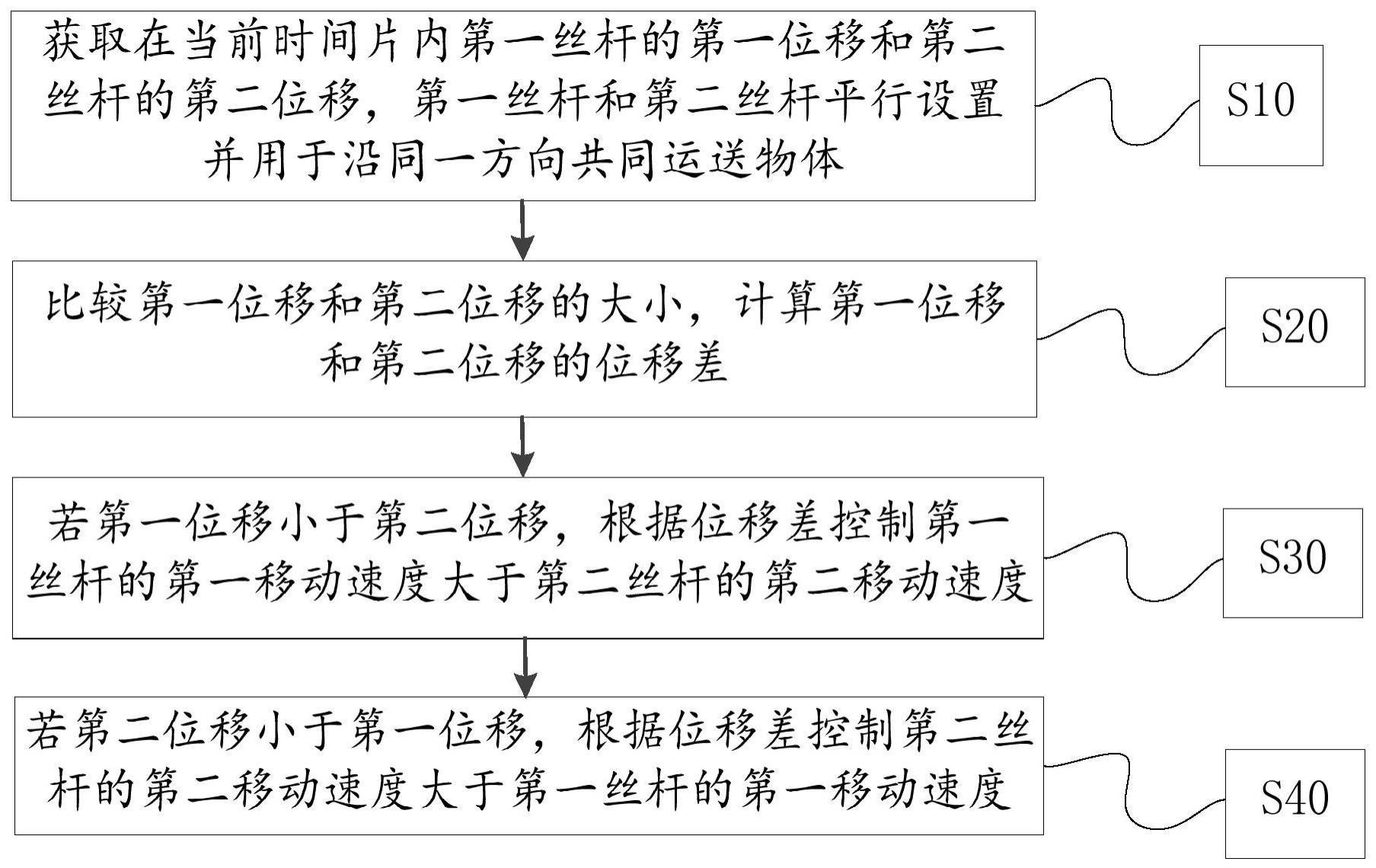
3、获取在当前时间片内第一丝杆的第一位移和第二丝杆的第二位移,所述第一丝杆和所述第二丝杆平行设置并用于沿同一方向共同运送物体;
4、比较所述第一位移和所述第二位移的大小,计算所述第一位移和所述第二位移的位移差;
5、若所述第一位移小于所述所述第二位移,根据所述位移差控制所述第一丝杆的第一移动速度大于所述第二丝杆的第二移动速度;
6、若所述第二位移小于所述所述第一位移,根据所述位移差控制所述第二丝杆的所述第二移动速度大于所述第一丝杆的第一移动速度。
7、在一些实施例中,所述获取在当前时间片内第一丝杆的第一位移和第二丝杆的第二位移进一步包括:
8、获取在当前时间片内第一光栅尺检测所述第一丝杆的第一移动速度和第二光栅尺检测所述第二丝杆的第二移动速度;
9、根据所述第一移动速度计算所述当前时间片内的所述第一位移;
10、根据所述第二移动速度计算所述当前时间片内的所述第二位移。
11、在一些实施例中,所述方法均于同一所述当前时间片内执行。
12、在一些实施例中,所述当前时间片小于或等于50ms。
13、本发明的第二方面提供了一种多轴同步运动控制方法,所述方法包括:
14、第一光栅尺在当前时间片内检测所述第一丝杆的第一移动速度并发送所述第一移动速度至控制模块:
15、第二光栅尺在当前时间片内检测所述第二丝杆的第二移动速度并发送所述第二移动速度至控制模块;
16、所述控制模块根据所述第一移动速度和所述第二移动速度分别计算所第一丝杆的第一位移和所述第二丝杆的第二位移;
17、所述控制模块比较所述第一位移和所述第二位移的大小,计算所述第一位移和所述第二位移的位移差;
18、若所述第一位移小于所述所述第二位移,所述控制模块根据所述位移差控制所述第一丝杆的第一移动速度大于所述第二丝杆的第二移动速度以使在下一时间片所述第一位移和所述第二位移同步;
19、若所述第二位移小于所述所述第一位移,所述控制模块根据所述位移差控制所述第二丝杆的所述第二移动速度大于所述第一丝杆的第一移动速度以使在下一时间片所述第一位移和所述第二位移同步。
20、在一些实施例中,所述控制模块包括第一dsp运算器、第二dsp运算器、差值比较器、第一速度控制模块、第二速度控制模块、第一脉冲输出模块和第二脉冲输出模块,所述第一dsp运算器与所述第一光栅尺连接,所述第二dsp运算器与所述第二光栅尺连接,所述第一dsp运算器、所述第二dsp运算器、所述第一速度控制模块和所述第二速度控制模块均与所述差值比较器连接,所述第一脉冲输出模块连接所述第一速度控制模块和所述第一丝杆,所述第二脉冲输出模块连接所述第二速度控制模块和所述第二丝杆,所述方法进一步包括:
21、所述第一光栅尺在所述当前时间片内检测所述第一丝杆的第一移动速度并发送所述第一移动速度至所述第一dsp运算器;
22、所述第二光栅尺在所述当前时间片内检测所述第二丝杆的第二移动速度并发送所述第二移动速度至所述第二dsp运算器;
23、所述第一dsp运算器根据所述第一移动速度计算所第一丝杆的所述第一位移;
24、所述第二dsp运算器根据所述第二移动速度计算所第二丝杆的所述第二位移;
25、所述差值比较器比较所述第一位移和所述第二位移的大小,计算所述第一位移和所述第二位移的位移差;
26、若所述第一位移小于所述所述第二位移,所述第一速度控制模块根据所述位移差发送第一脉冲至所述第一脉冲输出模块,所述第一脉冲输出模块控制所述第一丝杆以所述第一移动速度移动,所述第二速度控制模块根据所述位移差发送第二脉冲至所述第二脉冲输出模块,所述第二脉冲输出模块控制所述第二丝杆以所述第二移动速度移动,所述第一脉冲的发生频率大于所述第二脉冲的发生频率以使所述第一移动速度大于所述第二移动速度;
27、若所述第二位移小于所述所述第一位移,所述第一速度控制模块根据所述位移差发送第一脉冲至所述第一脉冲输出模块,所述第一脉冲输出模块控制所述第一丝杆以所述第一移动速度移动,所述第二速度控制模块根据所述位移差发送第二脉冲至所述第二脉冲输出模块,所述第二脉冲输出模块控制所述第二丝杆以所述第二移动速度移动,所述第二脉冲的发生频率大于所述第一脉冲的发生频率以使所述第二移动速度大于所述第一移动速度。
28、本发明的第三方面提供了一种多轴同步运动控制装置,包括控制模块、第一丝杆、第二丝杆、第一光栅尺和第二光栅尺,所述第一丝杆、第二丝杆、第一光栅尺和第二光栅尺均与所述控制模块连接,所述第一光栅尺用于检测所述第一丝杆的第一移动速度并反馈至所述控制模块,所述第二光栅尺用于检测所述第二丝杆的第二移动速度并反馈至所述控制模块,所述控制模块执行上述的多轴同步运动控制方法。
29、在一些实施例中,所述控制模块包括第一dsp运算器、第二dsp运算器、差值比较器、第一速度控制模块、第二速度控制模块、第一脉冲输出模块和第二脉冲输出模块,所述第一dsp运算器与所述第一光栅尺连接,所述第二dsp运算器与所述第二光栅尺连接,所述第一dsp运算器、所述第二dsp运算器、所述第一速度控制模块和所述第二速度控制模块均与所述差值比较器连接,所述第一脉冲输出模块连接所述第一速度控制模块和所述第一丝杆,所述第二脉冲输出模块连接所述第二速度控制模块和所述第二丝杆,
30、所述第一光栅尺用于在所述当前时间片内检测所述第一丝杆的第一移动速度并发送所述第一移动速度至所述第一dsp运算器;
31、所述第二光栅尺用于在所述当前时间片内检测所述第二丝杆的第二移动速度并发送所述第二移动速度至所述第二dsp运算器;
32、所述第一dsp运算器用于根据所述第一移动速度计算所第一丝杆的所述第一位移;
33、所述第二dsp运算器用于根据所述第二移动速度计算所第二丝杆的所述第二位移;
34、所述差值比较器用于比较所述第一位移和所述第二位移的大小,计算所述第一位移和所述第二位移的位移差;
35、若所述第一位移小于所述所述第二位移,所述第一速度控制模块根据所述位移差发送第一脉冲至所述第一脉冲输出模块,所述第一脉冲输出模块控制所述第一丝杆以所述第一移动速度移动,所述第二速度控制模块根据所述位移差发送第二脉冲至所述第二脉冲输出模块,所述第二脉冲输出模块控制所述第二
36、丝杆以所述第二移动速度移动,所述第一脉冲的发生频率大于所述第二脉冲的5发生频率以使所述第一移动速度大于所述第二移动速度;
37、若所述第二位移小于所述所述第一位移,所述第一速度控制模块根据所述位移差发送第一脉冲至所述第一脉冲输出模块,所述第一脉冲输出模块控制所述第一丝杆以所述第一移动速度移动,所述第二速度控制模块根据所述位移差
38、发送第二脉冲至所述第二脉冲输出模块,所述第二脉冲输出模块控制所述第二0丝杆以所述第二移动速度移动,所述第二脉冲的发生频率大于所述第一脉冲的发生频率以使所述第二移动速度大于所述第一移动速度。
39、在一些实施例中,还包括通信接口和mcu模块,所述通信接口与所述mcu模块连接,所述mcu模块与所述控制模块连接,所述通信接口将外部指令传
40、输至所述mcu模块,所述mcu模块发送所述外部指令至所述控制模块,所述5控制模块根据所述外部指令控制所述第一丝杆和所第二丝杆相应移动。
41、本发明的第四方面提供了一种计算机可读存储介质,其内存储有计算机程序,所述计算机程序可被至少一个处理器所执行,以使所述至少一个处理器执行上述的多轴同步运动控制方法的步骤。
42、本发明的技术效果为:控制模块根据第一丝杆的第一位移和第二丝杆的第0二位移进行比较和计算,相应控制位移较小所对应的丝杆的移动速度大于位移较大的另一个丝杆的移动速度,减少第一丝杆和第二丝杆的位移误差,实现良好的同步移动,以及提高丝杆和导轨等设备的使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!