一种基于改进BIT*与人工势场法的电力巡检机器人路径规划方法与流程
本发明涉及智能,特别是涉及一种动态环境下的基于改进bit*与人工势场法的电力巡检机器人路径规划方法。
背景技术:
1、随着人工智能技术的不断发展,具备自主路径规划的巡检机器人在日常生活中因为其全天候、实时监控、数据云端,减少人力资源投入等等优点在电力设备、医院、写字楼等巡检方面受到了广泛运用。在电力巡检机器人领域中,自主导航的路径规划技术作为其的核心技术之一,计算出一种最快速、最安全到达目的地的路径对动态环境下的巡检显得尤为重要。现有的路径规划方法主要有:a*算法、rrt算法、概率路线图法、人工势场法,蚁群算法等等。但是单一的路径规划算法在动态场景下实施避障缺陷凸显,故此,提出一种具备多种算法融合优势的新型路径规划算法显得尤为重要。
2、传统的批通知树(batch informed trees,bit*)算法并存了a*算法和rrt*算法的优势,但是bit*算法无法躲避动态障碍物,在动态场景下路径规划效果不佳。人工势场法是一种局部路径规划算法,其机理在于目标点施加引力作用,障碍物施加斥力作用,最终通过力的矢量和作用在巡检机器人上控制机器人运动,该算法因其路径光滑,逻辑简单广泛应用于机器人的局部动态避障中。但是人工势场法局限于局部环境,缺乏全局环境信息,因此容易引起目标不可达的情况。
技术实现思路
1、本发明的目的在于提出基于改进bit*与人工势场法的电力巡检机器人路径规划方法,提升电力巡检机器人的巡检效率。本发明方法中的bit*算法并存了a*算法和rrt*算法的优势,同时bit*算法与人工势场法的融合,弥补了bit*算法单独使用时局部出现未知障碍物无法进行及时躲避的问题,以及人工势场法单独使用时局部最优但是无法达到目标点的问题,满足巡检机器人全局路径规划过程中的动态避障需求。
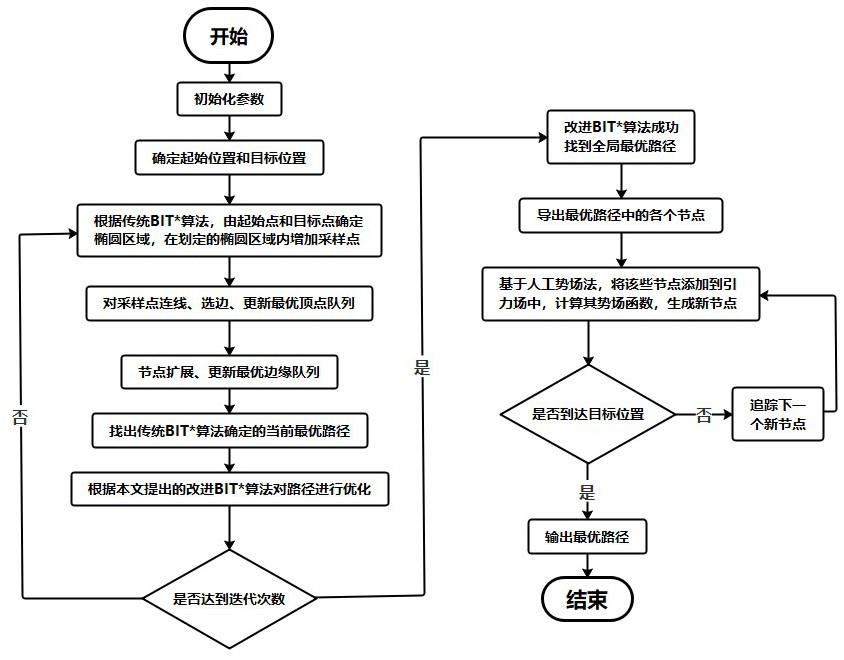
2、为解决上述技术问题,本发明提供一种基于改进bit*与人工势场法的电力巡检机器人路径规划方法,具体包括如下步骤:
3、s1,初始化参数;
4、s2,利用栅格地图确定起始位置和目标位置;
5、s3,根据传统bit*算法,由起始点和目标点确定椭圆区域,在划定的椭圆区域内增加采样点,对采样点进行连线、选边、节点扩展,找出传统bit*算法初步确定的最优全局路径;
6、s4,根据改进后的bit*算法对冗余节点去除并新增关键节点,进一步优化全局路径;
7、s5,导出最优全局路径中的各个节点;
8、s6,基于人工势场法,通过目标点提供引力,障碍物提供排斥力,形成引力场,将该些节点添加到引力场中,计算其势场函数,生成新目标节点(虚拟),并持续追踪这些新目标节点(虚拟)直至到达目标位置;
9、s7,输出bit*融合人工势场法得到的最优路径,电力巡检机器人路径规划结束。
10、进一步的,所述步骤s1中初始化参数,指改进bit*与人工势场法的巡检机器人路径规划算法参数,包括bit*融合人工势场法的算法参数以及巡检机器人的运动学参数:bit*融合人工势场法的算法参数包括最短路径长度参数,引力场函数参数,斥力场函数参数,距离函数参数,模拟时间;巡检机器人运动学参数包括初始方位角,最大线速度,最小线速度,最大角速度,最大线加速度,最大角加速度,线速度分辨率,角速度分辨率,采样周期。
11、进一步的,所述步骤s2中,利用栅格地图确定起始位置和目标位置,具体指每一次重新模拟都从新初始化栅格地图,并在在初始化后的栅格地图中确定起始位置和目标位置。
12、进一步的,所述步骤s3中,根据传统bit*算法,由起始点和目标点确定椭圆区域,在划定的椭圆区域内增加采样点,对采样点进行连线、选边、节点扩展,找出传统bit*算法初步确定的最优全局路径,具体方法为:
13、步骤s3.1,根据传统bit*算法,由起始点和目标点确定椭圆区域,其中,椭圆两个焦点为起始点和目标点,椭圆长轴长度为dlong,表示目前状态下最优全局路径长度,椭圆短轴长度为dshort,dshort表示为:
14、
15、其中,dmin表示为起始位置和目标位置之间的欧拉距离;
16、步骤s3.2,在划定的椭圆区域内生成采样点;
17、步骤s3.3,对采样点进行连线选择,其中函数f1可以得出当前栅格模型中的最优连线,函数f2可以得出当前栅格模型的最优节点;函数f3可以得出当前栅格模型中的连线的最优移动成本;函数f4可以得出当前栅格模型中节点的最优移动成本,f1至f4表达式为:
18、f1=bestinquene(qe),
19、f2=bestinquene(qv),
20、f3=bestvalue(qe),
21、f4=bestvalue(qv),
22、其中,qe为存储最优移动成本递增排列的连线的队列,qv为存储最优移动成本递增排列的节点的队列;
23、步骤s3.4,对采样点进行连线操作,由步骤s3.3提到的函数f1得出当前栅格模型qe队列中的最优连线,连接一条最优连线之后并将该连线在队列qe中删除,便于完成连线之后的操作,避免数据冗杂;
24、步骤s3.5,对采样点进行节点扩展,由步骤s3.3提到的函数f2得出当前栅格模型qv队列中的最优节点v,然后计算各个节点v中欧拉距离小于r的节点构成采样点mr,当采样点中的节点m满足v和m的连线的欧拉距离小于v和m在栅格模型中的连线长度的条件时,将连线(v,m)增加到qe队列中;
25、步骤s3.6,如果还为达到迭代次数,则进行修剪操作,具体修剪操作为:删除采样点中成本高于预定成本的节点,删除当前存在的节点中成本大于预定成本的节点,删除当前完成的连线中成本大于预定成本的连线;
26、步骤s3.7,如果已经达到迭代次数,则生成当前状态下的机器人最优全局路径。
27、进一步的,所述步骤s4中,根据改进后的bit*算法对冗余节点去除并新增关键节点,进一步优化全局路径,具体方法为:
28、步骤s4.1,在传统bit*算法中,选出当前最优路径中的各个节点定义为nint、n1、n2、n3……nm、nm+1、nout;
29、步骤s4.2,连接nint和n2,当连线与障碍物不碰撞时连接nint和n3,n4,……,nm,当nint和nm连线与障碍物碰撞时终止连接;
30、步骤s4.3,选定nint与nm-1的连线中点成为新的n1;
31、步骤s4.4,将n1与nm,nm+1……连接,重复步骤s4.3过程;
32、步骤s4.5,重复整个过程,直至去除冗余点完成新的最优路径。
33、进一步的,所述步骤s5中,将改进后的bit*算法计算出的最优路径,导出其路径节点。
34、进一步的,所述步骤s6中,基于人工势场法,通过目标点提供引力,障碍物提供排斥力,形成引力场,将该些节点添加到引力场中,计算其势场函数,生成新目标节点(虚拟),并持续追踪这些新目标节点(虚拟)直至到达目标位置,具体方法为:
35、步骤s6.1,构建由引力势场和斥力势场组成的人工势场,其中引力场的构建如下:
36、
37、其中,uatt(n)为引力场,k为位置增益函数,增益系数与吸引力成正比关系,n-nout为巡检机器人与新目标节点(虚拟)的相对位置,大小为其之间的欧拉距离,对引力势场函数求解,得相应的引力fatt(n)为引力场的负梯度:
38、fatt(n)=-grad[uatt(n)]=k(n-nout),
39、斥力场函数构建如下:
40、
41、其中,ε为位置增益系数,τ为巡检机器人在当前节点与障碍物的相对位置,大小为其之间的欧拉距离,τ0为障碍物对巡检机器人产生影响的最远距离,n-nout为巡检机器人与新目标节点(虚拟)的相对位置,大小为其之间的欧拉距离,μ为任意常数,对斥力场函数求解,得相应的斥力frep(n)为斥力场的负梯度:
42、
43、步骤s6.2,针对人工势场法局部最优和目标不可达的问题,提出一种引入n值的方法,对引力场函数进行改进,改进有引力场为:
44、
45、其中u'att(n)为改进后引力场,k1和k2为位置增益函数,增益系数与吸引力成正比关系,n值可以使巡检机器人能一直由起始点的势能高出到目标点的势能地处,n-nout为巡检机器人与新目标节点(虚拟)的相对位置,m为新目标节点(虚拟)强影响范围距离。对引力势场函数求解,相应的引力fa'tt(n)为目标势场函数的负梯度:
46、
47、当巡检机器人与新目标节点(虚拟)的相对位置大于m,目标点的引力为主导作用力,可以使巡检机器人朝目标移动,当相对位置小于m,则会产生大于目标点引力的作用力使巡检机器人超目标点移动;
48、步骤s6.3,针对人工势场法局部最优和目标不可达的问题,提出一种引入安全距离τα的方法,对斥力场函数urep(n)进行改进,改进后斥力场函数u'rep(n)为:
49、
50、步骤s6.4,将改进后bit*算法的最优路径导出节点,作为人工势场法的虚拟目标点,将这些节点加入势场函数,当巡检机器人移动至第一个目标点,下一个节点会在人工势场法下生成新目标节点(虚拟),并持续追踪这些新目标节点(虚拟)直至到达目标位置。
51、进一步的,所述步骤s7中,输出bit*融合人工势场法得到的最优路径,电力巡检机器人路径规划结束,具体指使用改进人工势场法持续追踪这些新目标节点(虚拟)直至到达目标位置后,输出bit*融合人工势场法得到的最优路径。
52、本发明与现有技术相比,其显著优点在于:1)解决bit*算法单独使用时局部出现未知障碍物无法进行及时躲避的问题,以及人工势场法单独使用时局部最优但是无法达到目标点的问题。2)对传统bit*算法进行改进,采用了一种路径中点法来处理节点,该方法剔除了冗余节点,新增了关键节点,减少了算法路径规划的时间。3)对人工势场法进行改进,在引力场函数中使用自适应策略,提出一种引入n值的方法,对引力场函数进行改进;在斥力场函数中加入安全距离函数,对斥力场函数进行改进。改进后的人工势场法改善了其容易陷入局部最优而目标不可达的问题。4)将bit*算法与人工势场法融合,同时对二种算法进行改进,达到了既能动态避障,又能全局规划的高效算法,还提高了路径规划的平滑度以及规划效率。
- 还没有人留言评论。精彩留言会获得点赞!