一种无人船集群遍历多目标点路径规划方法
本发明属于水域环境的路径规划领域,具体是一种无人船集群遍历多目标点路径规划方法。
背景技术:
1、随着科技的发展与时代的进步,人们越来越重视对海洋资源的开发,对海洋的了解与探索也越来越深入。
2、目前,大部分科研工作者选择利用无人船进行水域探索,由于单一的无人船能源有限、任务负载容量低和探索效率低,导致任务成功率也低。同时,传统的路径规划算法将洋流和障碍物分割开来进行考虑,直接将障碍物设置为禁区,或是对障碍物进行简单的膨胀处理用于无人船的安全航行,导致算法的效率低。因此,寻找一种能够使无人船集群在短时间内对环境中的各个目标点进行遍历的路径规划方法,可以提高无人船集群在执行探索任务时的工作效率。
3、当前已经有多种传统方法和智能方法来解决无人船集群遍历多目标点问题,比如基于启发式的全局优化算法和基于递归过程的最优分配算法等。
4、传统的匈牙利算法是一种在多项式时间内求解任务分配问题的组合优化算法,该算法在进行指派时,首先查询矩阵各行各列的最小值,然后对矩阵进行行列规约,让每一行每一列都出现零值,最后依据这些零值来确定指派方案。
5、传统的rrt算法是一种随机采样树结构的路径规划算法,该算法的基本思想是通过不断增加特定的随机树来构造路径,不需要对空间进行建模,且节点之间的扩展不需要进行预处理。该算法会对节点之间的路径进行碰撞检测,以此来解决避障问题,可以快速搜索空间中的空白区域,进一步减小路径节点与目标点之间的距离。
技术实现思路
1、本发明针对无人船集群面对多目标点的遍历需求,通过对rrt*算法进行改进,并结合匈牙利算法,提出了一种无人船集群遍历多目标点路径规划方法,提高了无人船集群多目标点的任务分配效率,同时,通过迭代来优化目标点的分配策略,增加了算法的准确性。
2、所述无人船集群遍历多目标点路径规划方法,具体步骤如下:
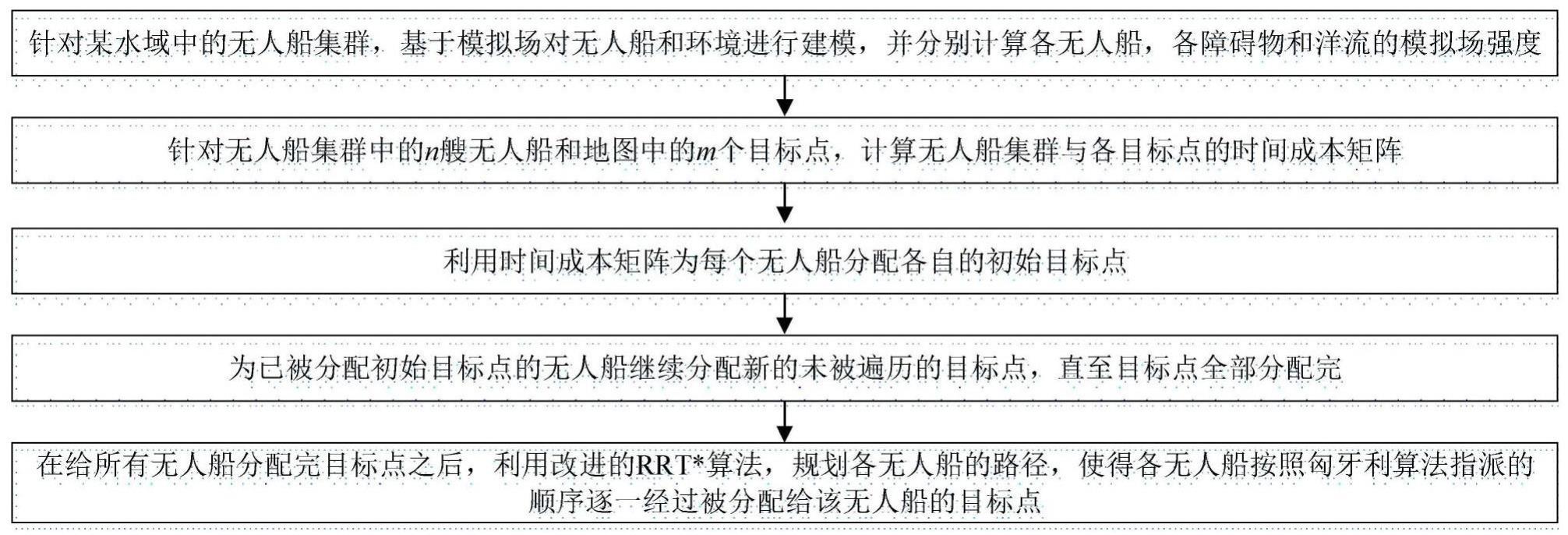
3、步骤一、针对某水域中的无人船集群,基于模拟场对无人船和环境进行建模,并分别计算各无人船,各障碍物和洋流的模拟场强度。
4、步骤二、针对无人船集群中的n艘无人船和地图中的m个目标点,计算无人船集群与各目标点的时间成本矩阵c;
5、n<m,时间成本矩阵c如下公式表示:
6、
7、上式中,cij是第j艘无人船对应第i个目标点的时间成本。
8、步骤三、利用时间成本矩阵c为每个无人船分配各自的初始目标点;
9、具体步骤为:
10、步骤301、对时间成本矩阵c进行行列规约,每行或每列都减去各自对应的最小值,使每一行每一列都出现零值;
11、步骤302、判断是否找到n个独立的0值,如果是,则将与0位置的行系数对应的目标点指派给与0位置的列系数对应的无人船,并结束;否则,进入步骤303;
12、步骤303、寻找矩阵c中只有一个0值的列,将这个0值标记为λ0,然后用h0标记其所在行的其他0值;同时,寻找矩阵c中只有一个0值的行,将这个0值标记为λ1,然后用h1标记其所在列的其他0值。
13、步骤304、重复执行上述标记工作,直到矩阵c中所有0值均被标记,且每一列有且只有一个λ0,则最优指派结束,将与λ0的行系数对应的目标点指派给与λ0的列系数对应的无人船。
14、步骤305、针对不存在0值的行,从该行数字对应的各列中选择含0值的列,并将该列全部标记e0;然后,将不存在0值的列中,各列数字对应的含0值的行全部标记e1;
15、步骤306、重复执行上述标记工作,找到未被标记e1的行中的最小值,使行中的所有元素都减去这个最小值;找到未被标记e0的列中的最小值,使列中的所有元素都减去这个最小值;直到矩阵c中每一列均有且只有一个λ0,则最优指派结束,将与λ0的行系数对应的目标点指派给与λ0的列系数对应的无人船。
16、步骤四、为已被分配初始目标点的无人船继续分配新的未被遍历的目标点,直至目标点全部分配完;
17、具体为:
18、首先,计算已被分配初始目标点的无人船到剩余目标点的时间成本矩阵为cn,其表达式如下:
19、
20、然后,当剩余的未被指派的目标点个数小于n,执行以下步骤:
21、步骤401、将矩阵cn中的各列元素对应的时间成本,与该列对应的无人船已分配的目标点的时间成本相加,得到新的时间成本矩阵c′n。
22、步骤402、对时间成本矩阵c′n进行行列规约,每行或每列都减去各自对应的最小值,使每一行每一列都出现零值。
23、步骤403、判断是否找到m个独立的零值,如果是,则将与0值位置的行系数对应的目标点指派给与0值位置的列系数对应的无人船,并结束;否则,进入步骤404;
24、步骤404、寻找矩阵c′n中只有一个0值的列,将这个0值标记为λ2,然后用hhang标记所在行的其他0值;同时,寻找矩阵c′n中只有一个0值的行,将这个0值标记为λ3,然后用hlie标记所在列的其他0值。
25、其中,hhang的表达式如下:
26、
27、hlie的表达式如下:
28、
29、步骤405、重复执行上述标记工作,直到矩阵c′n中所有0值均被标记,且每一行有且只有一个λ3,则最优指派结束,将与λ3的行系数对应的目标点指派给与λ3的列系数对应的无人船。
30、步骤406、针对不存在0值的行,从该行数字对应的各列中选择含0值的列,并将该列全部标记e2;然后,将不存在0值的列中,各列数字对应的含0值的行全部标记e3;
31、步骤407、重复执行上述标记工作,找到未被标记e3的行中的最小值,使行中的所有元素都减去这个最小值;找到未被标记e4的列中的最小值,使列中的所有元素都减去这个最小值;直到矩阵c′n中每一行均有且只有一个λ3,则最优指派结束,将与λ3的行系数对应的目标点指派给与λ3的列系数对应的无人船,否则,将每行或每列中具有最小的hhang+hlie值的λ3或λ2分配给对应的无人船。
32、步骤五、在给所有无人船分配完目标点之后,利用改进的rrt*算法,规划各无人船的路径,使得各无人船按照匈牙利算法指派的顺序逐一经过被分配给该无人船的目标点。
33、具体规划过程为:
34、步骤501、设改进rrt*算法的采样范围为m,拓展步长为p,t为随机树路径,qinit为初始点,qgoal为目标点,n为最大迭代次数;
35、步骤502、初始化随机树t,并基于随机树t生成趋于洋流方向的路径点qrand;
36、具体生成过程为:
37、首先,生成一个0到1的随机数,若这个随机数的值大于0.9,则直接将目标点qgoal作为路径点qrand;否则,将洋流和障碍物建立的模拟场进行叠加,得到模拟场bsum;
38、其表达式如下:
39、
40、δ为随机树t中索引最大的节点qt的洋流角度,ε为随机树t中索引最大的节点qt的障碍物模拟场方向,bo为障碍物模拟场的强度,bc为洋流场的模拟场强度;
41、然后,计算随机树t中索引最大的节点qt的综合模拟场的方向δnew,其表达式如下:
42、
43、最后,将δnew的值赋给洋流角度δ,并结合模拟场bsum计算点qrand的x轴坐标xrand和y轴坐标yrand;
44、xrand的表达式如下:
45、
46、节点qt的坐标为(xt,yt),nr1为0到m的随机数,sr1为0到|ψ-δ|/2的随机数;ψ为节点qt所处的路径的航行角;
47、yrand的表达式如下:
48、
49、nr2为0到的随机数,sr2为0到|ψ-δ|/2的随机数;
50、步骤503、选择随机树t中距离点qrand最近的节点作为点qnear,从点qnear与点qrand的连线中取一个点qnew,使得点qnew与点qnear的距离为步长p;
51、步骤504、以m为采样范围,以点qnew为中心,从周围选取随机树t中索引第二大的节点作为点qneighbor;同时,检测随机树t中各节点与点qnew的连线段之间是否存在障碍物;如果存在障碍物,返回步骤502重新采样点,否则,进入步骤505;
52、步骤505、以m为检测范围,通过随机采样检测树t中各节点与点qnew之间的洋流是否允许无人船航行。
53、具体步骤如下:
54、首先,设e为函数的最大迭代次数,qs为点qnew和点qt连线的中点,xs为中点qs的x轴坐标,通过生成0到m的随机数na1,计算随机检测点qdom的x轴坐标xdom;
55、xdom的表达式如下:
56、xdom=xs+na1
57、然后,利用中点qs的y轴坐标ys,生成一个0到的随机数na2,计算随机检测点qdom的y轴坐标为ydom;
58、ydom的表达式如下:
59、ydom=ys+na2
60、最后,设点qdom位置的洋流模拟场强度为bcdom,设点qdom位置的无人船模拟场强度为bsdom,若bcdom>2bsdom,则洋流不允许无人船通过,结束;否则,继续执行以下步骤。
61、步骤506、当bcdom≤2bsdom时洋流允许无人船通过,将随机树t中的点qneighbor与点qnew进行连接作为一段路径,计算点qneighbor与点qnew之间的路径距离,并判断该距离是否比原路径距离更短,如果是,则将该段路径返回给随机树t,否则,将原路径返回给随机树t;
62、步骤507、将点qnew作为新的路径起点,返回步骤504,重复上述步骤,直到规划处一条由qinit到qgoal的规划路径。
63、本发明的优点在于:
64、(1)本发明一种无人船集群遍历多目标点路径规划方法,基于场对无人船,洋流和障碍物进行建模,使无人船在航行过程中可以同时兼顾洋流和障碍物带来的影响。
65、(2)本发明一种无人船集群遍历多目标点路径规划方法,通过引入模拟洋流场采样函数和洋流约束函数,提高了算法在洋流环境下的有效性,缩短了无人船的实际航行时间,减少了时间成本。
- 还没有人留言评论。精彩留言会获得点赞!