最大功率点跟踪控制方法、系统及光伏发电输出装置与流程
本发明涉及光伏发电输出控制,尤其涉及一种用于光伏发电输出的最大功率点跟踪控制方法、系统及光伏发电输出装置。
背景技术:
1、光伏发电是新能源发电领域中的研究热点,但目前光伏电池易受外界环境如光照强度和温度影响,无法最大效率地利用太阳能发电,因此最大功率点追踪(mppt)技术显得尤为关键。
2、在理想条件下,外界环境处于均匀光照情况,光伏阵列p-u曲线(即功率/电压曲线)呈单峰状态,常用的传统mppt技术如扰动观察法和电导增量法即可实现最大功率点跟踪,在光伏发电系统中有着广泛的应用。但在实际工作环境下,太阳能电池板会受到尘土、云朵、楼宇等外界因素的遮蔽,出现局部阴影的情况,此时光伏电池功率输出曲线具有多个峰值点,在这种情况下,传统的mppt技术及其改进型变步长算法易陷入局部最大功率点。因此在复杂光照条件下一般采用元启发式算法与其他控制算法相结合应用于mppt技术。但是模糊控制法的模糊规则设定依赖于人为经验,设计存在困难;广义回归神经网络需要大量的训练样本,空间复杂程度高;传统粒子群算法的搜索能力很大程度上依赖于参数选择,容易陷入局部最优解。大多数群体智能优化算法,如布谷鸟搜索算法、灰狼优化算法等在全局搜寻能力,收敛速度和精度上有待提升。由此,现有的控制算法不能解决光伏阵列在复杂光照条件下输出功率易陷入局部极值、调节速度慢以及输出功率波动大的问题。
技术实现思路
1、本发明的目的是提供一种可有效克服光伏阵列在复杂光照条件下易陷入局部极值并提升调节速度和输出稳定度的最大功率点跟踪控制方法、系统及光伏发电输出装置。
2、为了实现上述目的,本发明公开了一种用于光伏发电输出的最大功率点跟踪控制方法,其包括第一方法和第二方法,所述第一方法包括:
3、基于扰动观察法获得控制光伏阵列最大功率输出的初始占空比,其中,所述扰动观察法的扰动步长随所述光伏阵列输出功率的功率变化量变化;
4、所述第二方法包括:
5、提供一布谷鸟算法,鸟巢位置对应控制所述光伏阵列功率输出的占空比,鸟蛋健康度对应所述光伏阵列输出功率,并以所述扰动观察法获得的光伏阵列工作参数构建鸟巢位置上限,将所述初始占空比构建为鸟巢位置下限;
6、获得较佳鸟巢位置及其鸟蛋健康度;
7、判断所述鸟蛋健康度的变化率是否大于或等于阈值,如果是,则返回所述第一方法,如果否,则将当前所述鸟蛋健康度对应的较佳鸟巢位置记录为最优鸟巢;
8、输出所述最优鸟巢所代表的占空比给功率控制电路。
9、较佳地,在所述布谷鸟算法中,当获取到最优鸟巢后,还判断鸟巢间最大距离是否小于设定阈值,如果是,则输出所述最优鸟巢所代表的占空比给功率控制电路,如果否,则通过莱维飞行更新鸟巢位置。
10、较佳地,基于所述布谷鸟算法,获得较佳鸟巢位置及其鸟蛋健康度的方法包括:
11、检测并记录首个鸟巢位置和与其对应的鸟蛋健康度;
12、基于莱维飞行,获得下一鸟巢位置及其对应的鸟蛋健康度;
13、将当前鸟巢位置的鸟蛋健康度与上一鸟巢位置的鸟蛋健康度比对,将数值较大者所对应的鸟巢位置作为当前鸟巢位置;
14、生成一随机数ri,0≤ri≤1,判断该随机数是否大于预设的宿主鸟发现外来鸟蛋的概率,如果是,则继续获得下一鸟巢位置,以继续迭代更新,如果否,则将当前鸟巢位置记录为较佳鸟巢位置,并记录与该较佳鸟巢位置对应的鸟蛋健康度。
15、较佳地,在所述布谷鸟算法中,构建的鸟巢位置的上下限满足如下公式:
16、
17、其中,d+为鸟巢位置上限,d-为鸟巢位置下限,dk为所述扰动观察法追踪到的初始占空比,istc为光伏阵列的最大功率点电流,ustc为光伏阵列中单个光伏组件最大功率点电压,ip为光伏阵列的输出电流,rl为光伏阵列输出端的负载电阻,up为下限电压,k为光伏阵列输出端的功率/电压曲线的峰值个数,m为下限电压选择系数。
18、较佳地,所述扰动步长s满足下述公式:
19、s=δumax×(1-π-k|dp|)
20、其中,δumax为扰动步长的最大值,π-为圆周率,k为控制扰动步长变化速率的调节参数,dp为当前光伏阵列输出功率的功率变化量。
21、较佳地,基于扰动观察法获得控制光伏阵列最大功率输出的初始占空比的方法包括:
22、基于所述扰动观察法测量当前输出功率,并计算该输出功率的变化率是否小于阈值,如果否,则根据所述扰动步长执行下一次输出功率的测量,如果是,则将当前控制光伏阵列功率输出的占空比输出,以获得所述初始占空比。
23、较佳地,所述扰动观察法的寻优方法包括如下步骤:
24、a.初始化所述光伏阵列的输出电压;
25、b.实时检测所述光伏阵列输出端的输出电压和输出电流,以获得当前时刻电压u(k)和当前时刻电流i(k),以及电压增量du=du=u(k)-u(k-1),以及功率p(k)=u(k)*i(k),以及功率增量dp=u(k)*i(k)-u(k-1)*i(k-1);
26、c.判断dp是否等于0,如果是,则返回;如果否,则执行步骤d;
27、d.判断dp是否大于0,如果是,则执行步骤e;如果否,执行步骤f;
28、e.判断du是否大于0,如果是,则令u(k+1)=u(k)+s,并返回;如果否,则令u(k+1)=u(k)-s,并返回;
29、f.判断du是否大于0,如果是,则令u(k+1)=u(k)-s,并返回;如果否,则令u(k+1)=u(k)+s,并返回;
30、其中,s为所述扰动步长。
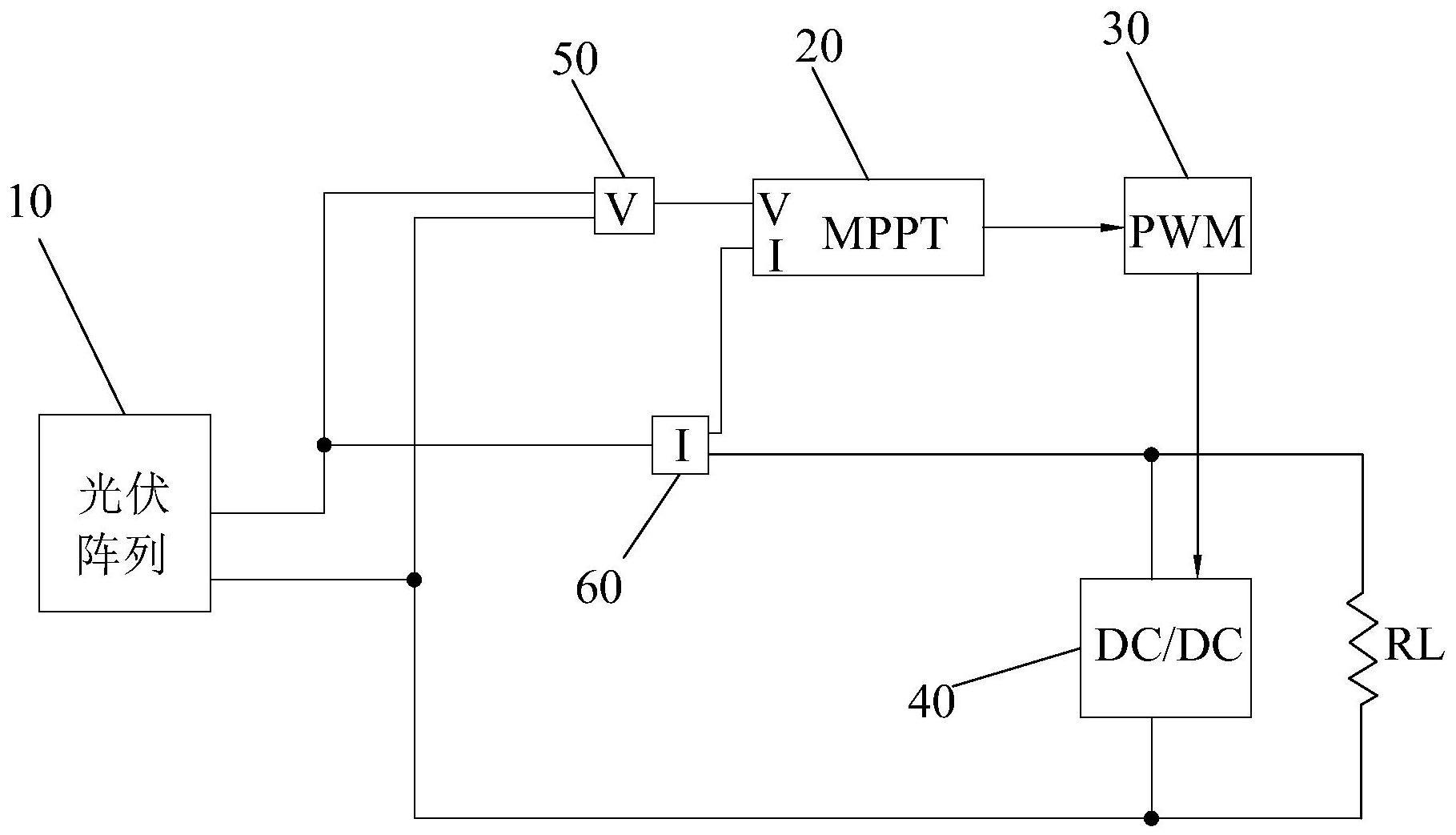
31、本发明还公开一种光伏发电输出装置,其包括电压检测器、电流检测器、最大功率点跟踪器、pwm控制器以及电压变换器;
32、所述电压变换器连接在光伏阵列的输出端,所述电压变换器的输出端用于连接负载,所述pwm控制器的输出端与所述电压变换器连接,所述pwm控制器的输入端与所述最大功率点跟踪器的输出端连接,所述最大功率点跟踪器的输入端还与所述电压检测器和电流检测器连接,所述电压检测器用于检测所述光伏阵列输出端的输出电压,所述电流检测器用于检测所述光伏阵列输出端的输出电流;所述最大功率点跟踪器基于上述用于光伏发电输出的最大功率点跟踪控制方法工作。
33、本发明还公开一种用于光伏发电输出的最大功率点跟踪控制系统,其包括:
34、一个或多个处理器;
35、存储器;
36、以及一个或多个程序,其中一个或多个程序被存储在所述存储器中,并且被配置成由所述一个或多个处理器执行,所述程序包括用于执行如上所述的用于光伏发电输出的最大功率点跟踪控制方法的指令。
37、本发明还公开一种计算机可读存储介质,其包括计算机程序,所述计算机程序可被处理器执行以完成如上所述的用于光伏发电输出的最大功率点跟踪控制方法。
38、通过上述方案,将扰动观察法追踪速度快的优势和布谷鸟算法全局寻优能力强的优势相结合,在最大功率点的追踪速度和精确度上更具优势,不但可有效克服光伏阵列在复杂光照条件下陷入局部极值的问题,还能有效避免光伏阵列输出功率产生较大波动。
- 还没有人留言评论。精彩留言会获得点赞!