一种抗风光伏支架追踪装置的制作方法
本技术涉及光伏发电,更具体地,涉及一种抗风光伏支架追踪装置。
背景技术:
1、支架行业位于光伏产业链中游,主要包括固定支架和跟踪支架两大类。固定支架进入门槛低、毛利率低且产品同质化严重。在光伏平价上网的背景下,以往更关注设备投资、固定支架占主导(即“每瓦成本”)的时代,必将向更关注投资回报、跟踪支架占主导(即“每度成本”)的时代转变。对于跟踪支架而言,由于它包括控制器、驱动及传动机构、钢结构等,属于一个自成体系的机电控制系统。主要有单轴和双轴两种跟踪支架。
2、现有技术中,确定的太阳运动轨迹不准确、发电场风况影响具体支架的控制参数,导致追踪效果较差、发电性价比低。
3、因此,如何提高追踪效果,是目前有待解决的技术问题。
技术实现思路
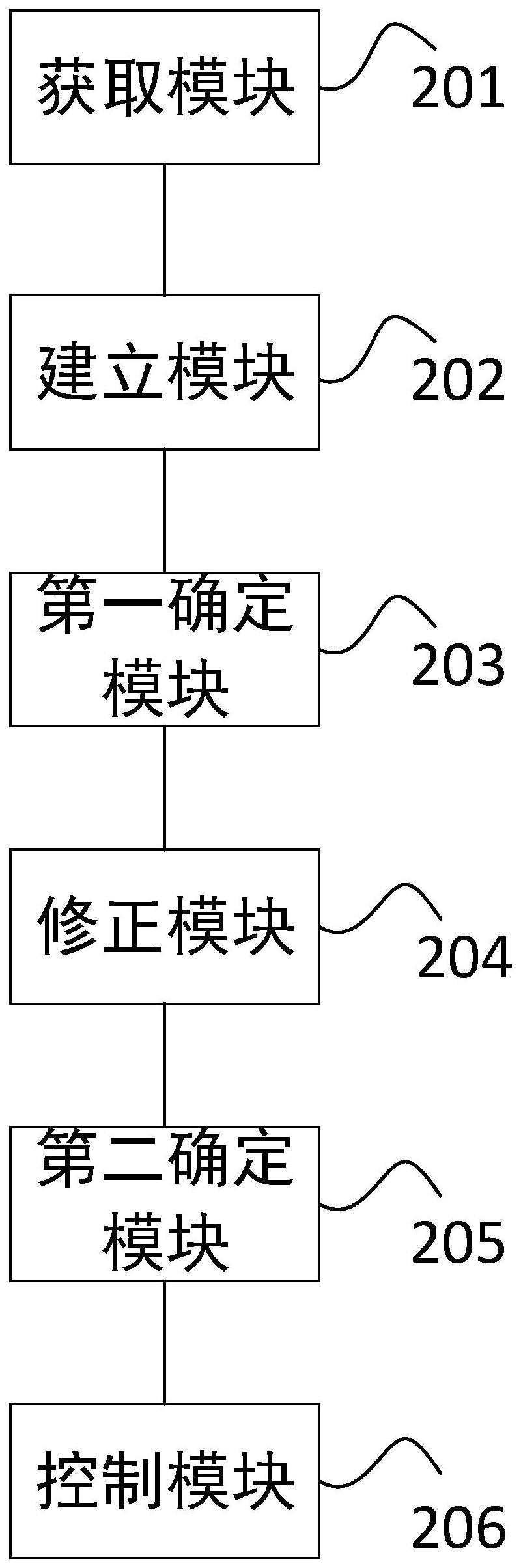
1、本发明提供一种抗风光伏支架追踪装置,用以解决现有技术中追踪效果差、发电效率低的技术问题。该装置包括光伏阵列和双轴追踪支架,所述双轴追踪支架包括控制器,所述控制器包括:
2、获取模块,用于获取气象台发布的气象数据,根据气象数据建立光伏阵列模型,以确定理论发电量;
3、建立模块,用于根据气象数据建立太阳的运动曲线,并根据运动曲线获取太阳方向参数;
4、第一确定模块,用于根据太阳方向参数确定双轴追踪支架的方向理论值,获取光伏阵列所处位置信息和当下的时间信息,并得到方向初始约束区间;
5、修正模块,用于根据理论发电量修正方向初始约束区间,得到方向约束区间;
6、第二确定模块,用于基于方向约束区间确定双轴追踪支架的方向实际值,并根据方向实际值确定双轴追踪支架控制参数;
7、控制模块,用于根据气象数据建立风洞模拟,并得到当下的光伏阵列受力情况,根据光伏阵列受力情况修正双轴追踪支架控制参数,根据修正后的双轴追踪支架控制参数进行追踪控制。
8、本技术一些实施例中,获取模块,具体用于:
9、确定光伏阵列模型变量参数,变量参数包括二极管影响因子和串并联电阻,气象数据包括大气温度;
10、确定光伏阵列模型变量参数,包括:
11、获取光照强度测量值和太阳入射角,根据光照强度测量值和太阳入射角确定辐照度,基于辐照度和大气温度确定光伏阵列温度;
12、基于辐照度和光伏阵列温度在第一预设数据库中得到对应的初始二极管影响因子和初始串并联电阻;
13、基于辐照度和光伏阵列温度确定校对量,校对量公式如下:
14、
15、其中,q为校对量,α1是辐照度对应的转换权重,q1是辐照度,α2是光伏阵列温度对应的转换权重,q2是光伏阵列温度,exp是指数函数;
16、基于校对量在第二预设数据库中得到对应的初始二极管影响因子的修正因子和初始串并联电阻的修正因子,根据修正因子对初始二极管影响因子和初始串并联电阻进行修正,得到二极管影响因子和串并联电阻;
17、根据二极管影响因子和串并联电阻建立光伏阵列模型,以确定理论发电量。
18、本技术一些实施例中,建立模块,具体用于:
19、太阳方向参数包括方位角和高度角;
20、获取太阳位置信息,根据太阳位置信息确定太阳的方位角和高度角;
21、气象数据包括日影信息,基于日影信息更新对应时间点的太阳的方位角和高度角,包括:
22、根据不同范围的日影信息对太阳的方位角进行更新;
23、
24、其中,ω1为更新后的方位角,ω01为原始方位角,k1为第一方位角常数,k2为第二方位角常数,k3为第三方位角常数,且k1>k2>k3,exp是指数函数,a1、b1、c1、d1是四个预设影响量范围值,n为日影信息中影响日影的参数种类个数,βi是第i个影响日影的参数对应的权重,wi为第i个影响日影的参数。
25、本技术一些实施例中,建立模块,具体用于:
26、根据不同范围的日影信息对太阳的高度角进行更新;
27、
28、其中,ω2为更新后的高度角,ω02为原始高度角,k4为第一高度角常数,k5为第二高度角常数,k6为第三高度角常数,且k1>k2>k3,exp是指数函数,a2、b2、c2、d2是四个预设影响量范围值,n为日影信息中影响日影的参数种类个数,βi是第i个影响日影的参数对应的权重,wi为第i个影响日影的参数;
29、基于更新后的太阳高度角和方位角建立太阳运动曲线。
30、本技术一些实施例中,第一确定模块,具体用于:
31、根据光伏阵列所处位置信息和当下的时间信息在第三预设数据库中得到对应的方向初始约束区间;
32、方向初始约束区间包括双轴追踪支架的高度角区间和方位角区间。
33、本技术一些实施例中,修正模块,具体用于:
34、方向理论值包括高度角理论值和方位角理论值;
35、根据理论发电量在第四预设数组库中得到修正因子,根据修正因子对方向初始约束区间进行修正,得到第一方向初始约束区间;
36、若第一方向初始约束区间离方向理论值比方向初始约束区间离方向理论值更近,则将第一方向初始约束区间作为方向约束区间;
37、若方向初始约束区间离方向理论值比第一方向初始约束区间离方向理论值更近,则判断第一高度角区间和第一方位角区间距离理论值的情况;
38、其中,第一方向初始约束区间包括第一高度角区间和第一方位角区间,第一方向初始约束区间离方向理论值比方向初始约束区间离方向理论值更近,指的是第一高度角区间和第一方位角区间均离方向理论值更近。
39、本技术一些实施例中,修正模块,具体用于:
40、若第一高度角区间和第一方位角区间距离理论值的距离均比方向初始约束区间距离理论值的距离远,则将方向初始约束区间作为方向约束区间;
41、若第一高度角区间距离理论值的距离比方向初始约束区间距离理论值的距离更远,且第一方位角区间距离理论值的距离均比方向初始约束区间距离理论值的距离更近,则逐渐增加高度角区间对应的修正因子,并修正高度角区间,得到对应新的第一高度角区间,直至第一高度角区间距离理论值的距离比方向初始约束区间距离理论值的距离更近,且此时的修正因子与预设系数的乘积大于预设阈值,将更新后的第一高度角区间和第一方位角区间作为方向约束区间;
42、若第一高度角区间距离理论值的距离比方向初始约束区间距离理论值的距离更近,且第一方位角区间距离理论值的距离均比方向初始约束区间距离理论值的距离更远,则判断第一方位角区间两端点与理论值的大小;
43、若第一方位角区间左端点值大于理论值,则逐渐减小方位角区间对应的修正因子,并修正方位角区间,得到对应新的第一方位角区间,直至第一方位角区间距离理论值的距离比方向初始约束区间距离理论值的距离更近,将更新后的第一方位角区间和第一高度角区间作为方向约束区间;
44、若第一方位角区间右端点值小于理论值,则逐渐增加方位角区间对应的修正因子,并修正方位角区间,得到对应新的第一方位角区间,直至第一方位角区间距离理论值的距离比方向初始约束区间距离理论值的距离更近,将更新后的第一方位角区间和第一高度角区间作为方向约束区间。
45、本技术一些实施例中,控制模块,具体用于:
46、根据风洞模拟结果确定光伏阵列的力和弯矩;
47、n(i,j)=ε1(i,j)δ1(i,j)γ1(i,j)n0
48、m(i,j)=ε2(i,j)δ2(i,j)m0
49、其中,n(i,j)是第i行第j列对应的光伏阵列的力,ε1(i,j)是第i行第j列力对应的风向角影响权重,δ1(i,j)是第i行第j列力对应的光伏阵列倾角影响权重,γ1(i,j)是第i行第j列力对应的光伏阵列的衰减系数,n0是初始测量的力,m(i,j)是第i行第j列对应的光伏阵列的弯矩,ε2(i,j)第i行第j列弯矩对应的风向角影响权重,δ2(i,j)第i行第j列弯矩对应的光伏阵列倾角影响权重,m0是初始测量的弯矩;
50、根据光伏阵列的力和弯矩确定中间量;
51、l=μ1n(i,j)+μ2m(i,j)
52、其中,l是中间量,μ1是力对应的平衡权重,μ2是弯矩对应的平衡权重;
53、根据中间量确定修正系数,对双轴追踪支架控制参数进行修正。
54、通过应用以上技术方案,所述控制器包括:获取模块,用于获取气象台发布的气象数据,根据气象数据建立光伏阵列模型,以确定理论发电量;建立模块,用于根据气象数据建立太阳的运动曲线,并根据运动曲线获取太阳方向参数;第一确定模块,用于根据太阳方向参数确定双轴追踪支架的方向理论值,获取光伏阵列所处位置信息和当下的时间信息,并得到方向初始约束区间;修正模块,用于根据理论发电量修正方向初始约束区间,得到方向约束区间;第二确定模块,用于基于方向约束区间确定双轴追踪支架的方向实际值,并根据方向实际值确定双轴追踪支架控制参数;控制模块,用于根据气象数据建立风洞模拟,并得到当下的光伏阵列受力情况,根据光伏阵列受力情况修正双轴追踪支架控制参数,根据修正后的双轴追踪支架控制参数进行追踪控制。本技术通过影响量确定太阳运动曲线,并通过理论发电量修正方向参数的区间,从而准确得到控制区间值,并通过风洞模拟,确定光伏阵列的受力和弯矩。提高了跟踪效率和准确性,并且保证了控制精度。
- 还没有人留言评论。精彩留言会获得点赞!