一种基于MPSO-BP算法的分数阶PID控制器参数自动整定方法
本发明属于智能算法控制,具体涉及一种基于mpso-bp算法的分数阶pid控制器参数自动整定方法。
背景技术:
1、近年来,随着分数阶微积分在科学和工程领域中取得越来越多的应用,经分析和研究可知,分数阶微积分理论相比于整数阶微积分理论因阶次进行扩展,其相对应的分数阶pid控制器动态性能、静态性能都优于整数阶pid控制器。分数阶pid因多加入积分阶次、微分阶次两个参数,明显扩大调节范围,但是其参数整定问题也难以解决。
技术实现思路
1、本发明的目的就是为了解决上述背景技术存在的不足,提供一种mpso-bp算法的分数阶pid控制器参数自动整定方法,具有更强的鲁棒性,大大提高控制效率。
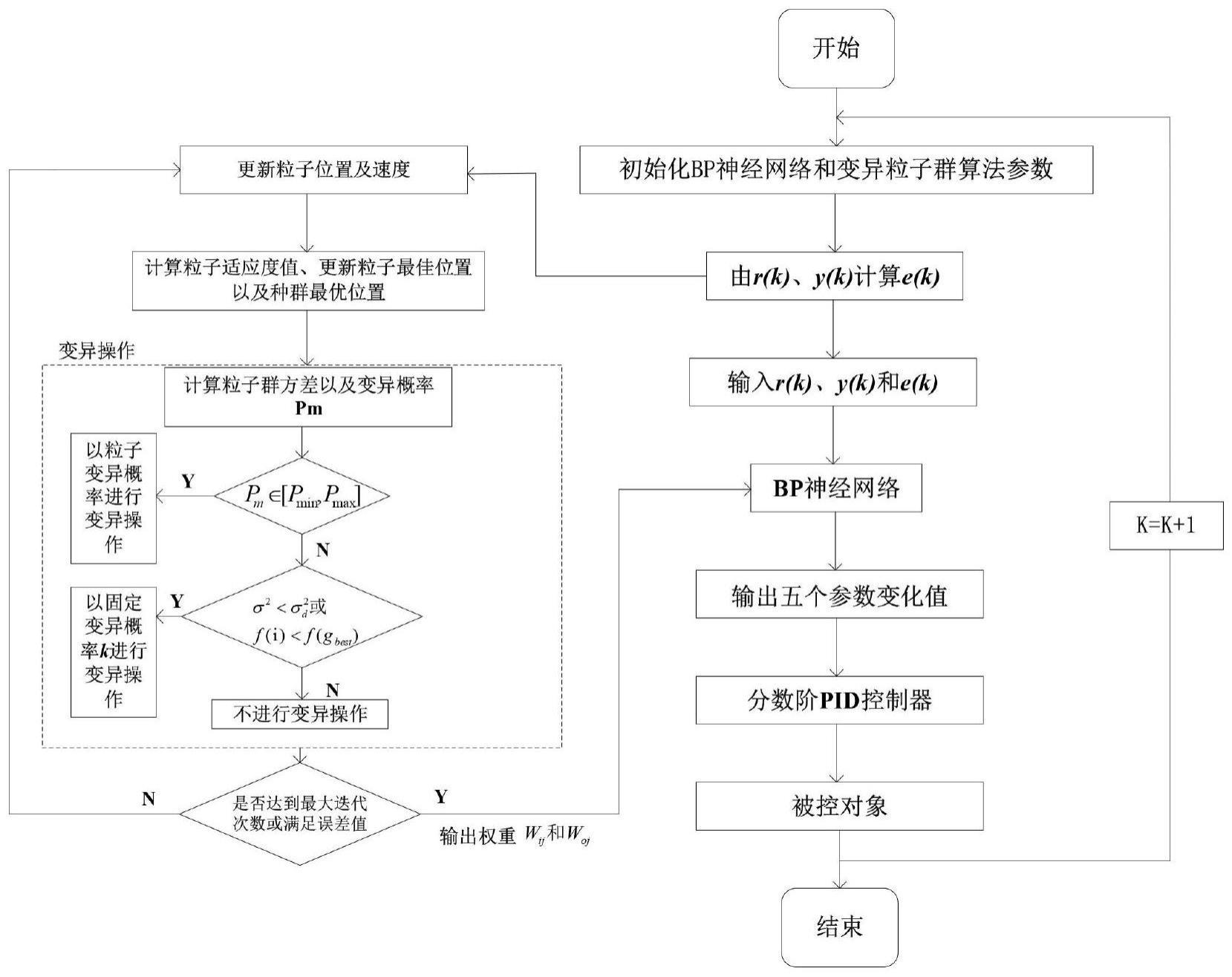
2、本发明采用的技术方案是:初始化bp神经网络基本参数;初始化变异粒子群优化算法;
3、基于上一个采样周期和当前采样周期分数阶pid控制器的输出信号,通过变异粒子群优化算法计算得到bp神经网络的权重;
4、将分数阶pid控制器的作用对象在上一个采样周期和当前采样周期的输出信号,以及当前采样周期的误差信号输入至更新权重后的bp神经网络;所述当前采样周期的误差信号为分数阶pid控制器的作用对象在上一个采样周期和当前采样周期输出信号的差值;
5、采用bp神经网络输出的分数阶pid控制器的比例系数的变化值、积分系数的变化值、微分系数的变化值以及积分阶次的变化值和微分阶次的的变化值,调整分数阶pid控制器在下一个采样周期的参数。
6、上述技术方案中,所述bp神经网络的输入为分数阶pid控制器的作用对象在上一个采样周期和当前采样周期分数阶pid控制器的输出信号,以及当前采样周期的误差信号;bp神经网络采用分数阶pid控制器的输出信号构建性能指标参数,计算得到并输出分数阶pid控制器的比例系数的变化值、积分系数的变化值、微分系数的变化值以及积分阶次的变化值和微分阶次的的变化值。
7、上述技术方案中,初始化bp神经网络基本参数的过程包括确定bp神经网络结构以及各层神经元个数,并给出输入层到隐含层的初始权重wij和隐含层到输出层的初始权重woj和分数阶pid控制器各参数初值,学习效率η,动量因子α;
8、所述bp神经网络包括三层结构,分别为输入层、隐含层和输出层;输入层包括3个神经元,分别为一个采样周期和当前采样周期分数阶pid控制器的输出信号,以及当前采样周期的误差信号;输出层的包括3个神经元,分别为分数阶pid控制器的比例系数的变化值、积分系数的变化值、微分系数的变化值以及积分阶次的变化值和微分阶次的的变化值。
9、上述技术方案中,初始化变异粒子群优化算法的过程包括:确定变异粒子群维数m,给出粒子群惯性权重范围[wmin,wmax],学习因子c1和c2,各粒子的速度范围[vmin,vmax]和位置范围[xmin,xmax]、最大变异概率pmax和最小变异概率pmin。
10、上述技术方案中,通过变异粒子群优化算法计算得到bp神经网络的权重的过程包括:在m维搜索空间中,第i个粒子在m维空间中的位置表示为:xi=(xi1,xi2,xi3,...,xim),第i个粒子经历的最优位置记为:pbest=(pbest1,pbest2,pbest3,...,pbestm),所有粒子经历的最优位置记为:gbest=(gbest1,gbest2,gbest3,...,gbestm);
11、每个粒子的飞行速度为vi=(vi1,vi2,vi3,...,vim),且每个粒子根据以下公式更新自己的速度和位置:
12、vid(k+1)=wvid(k)+c1rand(pid-xid)+c2rand(pgd-xid)
13、xid(k+1)=xid+vid
14、其中,d∈[1,m];k为粒子当前迭代次数值;pid为当前粒子经历最优位置,pgd为所有经历最优位置;w为粒子群算法中当前速度权重系数;
15、采用更新后的粒子位置和速度更新粒子适应度值、粒子最优值、种群最优值,并执行变异操作;循环执行上述操作直到达到最大迭代次数或满足误差值,则输出更新的bp神经网络加权系数wij和woj。
16、上述技术方案中,执行变异操作的过程包括:根据粒子适应度值、粒子最优值、种群最优值,通过变异粒子群优化算法计算粒子群方差以及变异概率;
17、记粒子群适应度方差为σ2,采用下式计算:
18、
19、其中,fi表示损失函数误差值,fmax表示损失函数最大值,f表示示损失函数最大值与最小值之差;
20、损失函数e的表达式如下:
21、
22、其中,r(k)表示上一个采样周期分数阶pid控制器的输出信号;y(k)表示当前采样周期分数阶pid控制器的输出信号;
23、将粒子群变异概率pm设计为一个算子k:
24、
25、σd2表示设定最大方差值;fgbest表示所有粒子经历最佳位置的损失函数;fd表示当前损失函数;
26、判断计算得到的变异概率pm是否处于区间[pmin,pmax]内;如果判定为是,则以粒子群变异概率进行变异操作;如果判定为否则判定设定最大方差值是否大于粒子群适应度方差,以及所有粒子经历最佳位置的损失函数大于当前损失函数误差值;
27、如果其中一个条件判定为是,则以固定变异概率进行变异操作;如果两者均判定为否则以不进行变异操作。
28、上述技术方案中,粒子群算法中当前速度权重系数w、学习因子c1和c2的表达式为:
29、w(k)=wmax-(wmax-wmin)k/n
30、c1(k)=c1max-(c1max-c1min)k/n
31、c2(k)=c2max+(c2max-c2min)k/n
32、其中,k为粒子当前迭代次数值,n为最大迭代次数值;c1max表示学习因子c1的最大值;c1min表示学习因子c1的最小值;c2max表示学习因子c2的最大值;c2min表示学习因子c2的最小值。
33、上述技术方案中,对分数阶pid控制器进行离散化,其时域表达式u(k):
34、
35、其中,kp表示分数阶pid控制器的比例系数,ki表示分数阶pid控制器的积分系数;kd表示分数阶pid控制器的微分系数;λ表示分数阶pid控制器的积分阶次;μ表示分数阶pid控制器的微分阶次;h为时间步长;qj和dj为二项式系数,其下标取值表示对应的编号;k表示采样周期编号;e()表示对应采样周期的误差信号;i和j均表示迭代次数;q0和d0表示初始的二项式系数;
36、
37、bp神经网络输出的分数阶pid控制器的比例系数的变化值、积分系数的变化值、微分系数的变化值以及积分阶次的变化值和微分阶次的的变化值采用如下公式计算:
38、
39、
40、
41、
42、
43、
44、其中,f1和f2分别为计算系数;η表示学习效率。
45、本发明的有益效果是:奔赴买那个运用改进变异粒子群算法结合控制对象的控制误差对bp神经网络的隐含层权值和输出层权值进行优化更新,从而对bp神经网络提供优化后的权值,然后对分数阶pid控制的比例系数,积分系数,微分系数以及积分阶次和微分阶次进行调整,通过自我学习的方式输出系统最优解,且变异粒子群优化算法可解决传统人工神经网络收敛容易陷入局部最优解的问题,具有更强的鲁棒性,大大提高了收敛速度和控制效率。本发明不需要建立精确地数学模型,能够自动识别被控参数、在算法迭代过程中自动整定参数,通过神经网络自我学习的方式自动逼近分数阶pid的最优解,而且改进mpso-bp算法克服传统pso算法收敛速度慢,易陷入局部最优解的问题,也克服传统bp神经网络反向传播过程中修正加权系数慢的问题,具有更强的鲁棒性,大大提高控制效率。
- 还没有人留言评论。精彩留言会获得点赞!