一种GEO卫星东西控制量优化选取方法与流程
本发明属于在轨航天器测控管理领域,尤其涉及一种geo卫星东西控制量优化选取方法。
背景技术:
1、理想的二体条件下,geo卫星相对地球观测者静止不动。geo卫星实际在空间运动时,受到各种摄动力影响,不再相对地球观测者静止不动,而是表现出复杂摄动运动规律。因此,需要定期或者不定期的轨道保持控制,使得卫星保持在定点位置附近,或允许的保持范围内运动。geo卫星在东西方向的经度漂移由两部分组成:一部分是地球形状摄动使卫星经度漂移;另一部分是太阳光压产生的偏心率摄动引起卫星经度日周期振荡。东西控制实际上就是要消除田谐项摄动(地球椭状摄动)的影响。东西控制目标选取通常有解析法和数值法两种,解析法特点是计算速度快,但精度较差,数值法计算精度高,但计算速度慢。
技术实现思路
1、本发明所要解决的技术问题是:针对geo卫星东西控制量的选取问题,而提供一种geo卫星东西控制量优化选取方法,建立解析法求初值与数值法迭代寻优的控制目标优化模型,解决计算精度与计算速度难以兼顾的难题,
2、本发明的技术解决方案是:本发明为一种geo卫星东西控制量优化选取方法,其特殊之处在于:该方法包括以下步骤:
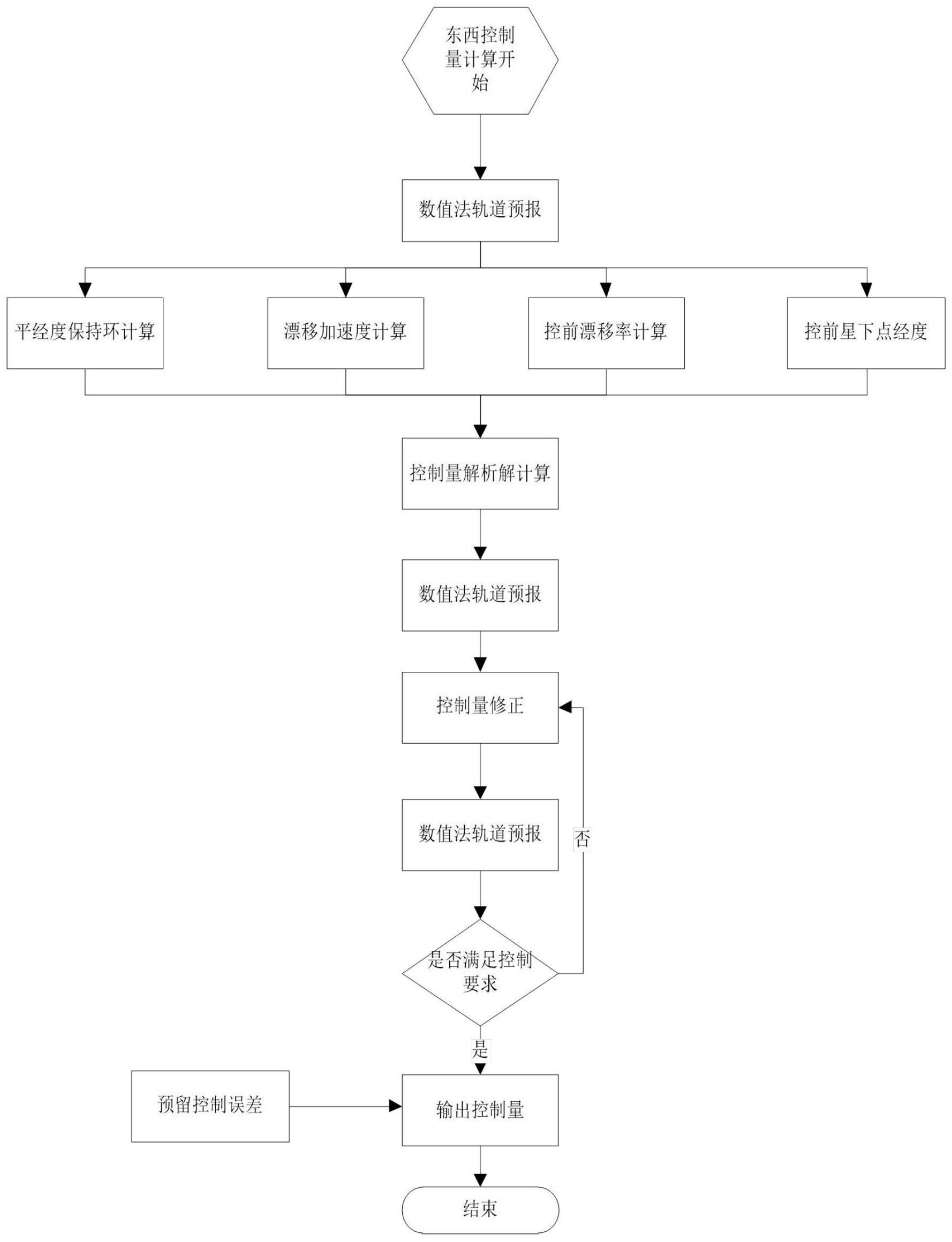
3、1)当前轨道预报
4、以卫星当前轨道为初始轨道,利用数值法进行轨道预报,预报结束时间应在计划控制时间之后,得到等间隔的轨道根数、卫星星历及星下点经度;
5、2)东西控制量解析解输入量计算
6、在已确定东西控制时间的条件下,东西控制量的解析解输入量包括平经度保持环、漂移加速度、控前星下点漂移率、控前星下点平经度等,计算方法如下:
7、2.1)确定平经度保持环;
8、2.2)计算漂移加速度
9、2.3)计算控前星下点漂移率
10、2.4)计算控前星下点平经度
11、3)东西控制控制量解析解计算
12、根据步骤2)的输入条件,计算东西控制量解析解,主要包括目标漂移率、保持周期、半长轴控制量以及所需速度增量;根据卫星漂移加速度方向,分两种情况:情况一:漂移加速度小于0情况二:漂移加速度大于0
13、4)数值法迭代修正控制量
14、根据卫星控后理论位置及速度矢量进行数值法轨道预报,对解析解计算的控制量进行迭代修正;
15、4.1)目标轨道数值法预报
16、4.1.1)计算控制时刻卫星控后理论位置矢量raim;
17、4.1.2)计算控制时刻卫星控后理论速度矢量vaim;
18、4.1.3)数值法轨道预报;
19、4.1.4)计算目标理论星下点平经度边界;
20、4.2)控制量修正;
21、4.3)修正后目标星下点平经度边界计算;
22、利用修正后速度增量,按照步骤4.1)目标轨道数值法预报的计算步骤计算修正后目标理论星下点平经度边界;
23、4.4)修正量收敛条件判断;
24、5)考虑控制误差的控制量确定。
25、进一步的,步骤2)的具体步骤如下:
26、2.1)确定平经度保持环
27、对于平经度保持要求的卫星,可直接引用经度保持要求中的西边界为和东边界单位为度;对于瞬经度保持要求的卫星,根据东西保持要求中的西边界λwest和东边界λeast,扣除星下点经度日震荡的最大值,折算成平经度保持环:
28、
29、
30、其中,e为偏心率;f为真近点角,单位度;i为卫星轨道倾角,单位为度;ω为近地点角距,单位度;
31、2.2)计算漂移加速度
32、
33、其中,为每日半长轴平均变化量,单位为米,可根据步骤一预报的轨道半长轴变化量计算,也可以将瞬时轨道根数转化为平轨道根数后再计算;μ为引力常数,值为3.986004356×1014,单位为m3/s2;r为地心至卫星的距离,单位为米;
34、2.3)计算控前星下点漂移率
35、
36、其中,λi为控制当天的升交点地理经度,单位为度;λi+1为控制下一天的升交点地理经度,单位为度;
37、2.4)计算控前星下点平经度
38、
39、其中,λ为控前卫星瞬时星下点经度,单位为度。
40、进一步的,步骤3)中,情况一:若漂移加速度小于0控制量计算步骤如下:
41、3.1)计算目标漂移率与保持周期p
42、若控制时卫星处于保持环东边界以西,即计算方法如下:
43、
44、其中,的单位为度/天。
45、
46、其中,p的单位为天;
47、若控制时卫星处于保持环东边界以东,即计算方法如下:
48、
49、
50、3.2)计算半长轴控制量δa
51、
52、3.3)计算速度增量δv
53、
54、其中,vs为geo卫星标称速度,单位为米/秒;as为geo卫星标称半长轴,单位为米。
55、进一步的,步骤3)中,情况二:若漂移加速度大于0控制量计算步骤如下:
56、3.1)计算目标漂移率与保持周期p
57、若控制时卫星处于保持环西边界以东,即计算方法如下:
58、
59、
60、若控制时卫星处于保持环西边界以西,即计算方法如下:
61、
62、
63、3.2)计算半长轴控制量δa
64、
65、3.3)计算速度增量δv
66、
67、其中,vs为geo卫星标称速度,单位为米/秒;as为geo卫星标称半长轴,单位为米。
68、进一步的,步骤4)的具体步骤如下:
69、4.1)目标轨道数值法预报
70、4.1.1)计算控制时刻卫星控后理论位置矢量raim
71、raim=r0
72、其中,为控制时刻卫星控前j2000.0坐标系下的卫星位置矢量,单位为米;
73、4.1.2)计算控制时刻卫星控后理论速度矢量vaim
74、
75、其中,为控制时刻卫星控前j2000.0坐标系下的速度矢量,单位米/秒;rrtn为卫星rtn坐标系转换至j2000.0坐标系的旋转矩阵;
76、4.1.3)数值法轨道预报
77、以控后卫星理论位置矢量raim和理论速度矢量vaim作为初始轨道,利用数值法进行轨道预报,预报时间长度应大于保持周期p,得到等间隔的轨道根数、卫星星历及星下点经度;
78、4.1.4)计算目标理论星下点平经度边界
79、
80、
81、其中,为目标星下点平经度西边界,单位为度;为目标星下点平经度东边界,单位为度;
82、4.2)控制量修正
83、根据geo卫星漂移加速度方向,计算控制量的修正量axz;
84、若漂移加速度小于0控制时卫星处于保持环东边界以西,即则:
85、
86、其中,axz单位为米;
87、若漂移加速度小于0控制时卫星处于保持环东边界以东,即则;
88、axz=0
89、若漂移加速度大于0控制时卫星处于保持环西边界以东,即则
90、
91、若漂移加速度大于0控制时卫星处于保持环西边界以西,即则
92、axz=0
93、修正后速度增量δv为:
94、
95、4.3)修正后目标星下点平经度边界计算
96、利用修正后速度增量,按照步骤4.1)目标轨道数值法预报的计算步骤计算修正后目标理论星下点平经度边界;
97、4.4)修正量收敛条件判断
98、判断修正后控制量是否满足收敛条件,若满足要求转入步骤五,否则将跳转至步骤四继续进行修正;
99、控制量满足收敛要求的判断条件:
100、若漂移加速度小于0控制时卫星处于保持环东边界以西,即
101、其中,ε为迭代收敛门限;
102、若漂移加速度小于0控制时卫星处于保持环东边界以东,即则判断修正控制量满足收敛条件;
103、若漂移加速度大于0控制时卫星处于保持环西边界以东,即
104、若漂移加速度大于0控制时卫星处于保持环西边界以西,即则判断修正控制量满足收敛条件。
105、进一步的,步骤5)的具体步骤如下:
106、考虑控制误差后的半长轴控制量δaxz为:
107、δaxz=(δa+axz)(1-σ)
108、其中,δaxz单位为米,σ为预期的控制误差;
109、速度增量为:
110、
111、本发明提供的一种geo卫星东西控制量优化选取方法,推导了解析解求解东西控制量初值的公式,设计了利用数值法进行迭代优化的方法,建立解析法求初值与数值法迭代寻优的控制量优化模型,解决计算精度与计算速度难以兼顾的难题,可应用于geo卫星东西控制策略制定工作,提高控制策略制定的精度和效率。
- 还没有人留言评论。精彩留言会获得点赞!