一种高超声速飞行器纵向控制方法
本发明涉及无人机控制,特别涉及一种高超声速飞行器纵向控制方法。
背景技术:
1、近些年来,高超声速飞行器受到了国内外的广泛关注,因为该类飞机飞行速度极快,能够在战场上更好地突防。然而,该类飞机的强非线性和强耦合的气动特点使得该类飞机的准确攻角控制变得十分困难,而高超声速飞行器的攻角会直接影响高超声速发动机的工作状态,因此高超声速飞行器的准确攻角控制是是十分必要的。
2、目前,针对高超声速飞行器攻角控制问题而提出的控制方法主要包括鲁棒控制、滑模控制、神经网络控制、模糊控制、有限时间控制以及基于指数收敛的受限控制器等。这些方法中鲁棒控制、滑模控制、神经网络控制以及模糊控制虽然能够处理模型不确定因素所带来的控制问题,但是它们无法控制闭环系统跟踪误差的收敛速率,而有限时间控制相比之下就能够提高高超声速飞行器系统跟踪误差的收敛速率,并减少跟踪误差的收敛时间。但是,有限时间控制器在提高系统收敛速率的同时,也会带来一些问题,例如控制律中关于跟踪误差的分数幂次项求导时,产生跟踪误差的负次幂项,在跟踪误差等于零时,这一项将会变得无穷大,从而造成闭环系统的崩溃,即所谓的奇异值问题。而基于指数收敛的受限控制器虽然不存在奇异值问题,但是该方法受扰动影响较大。因此,相比之下有限时间控制器更加适合用于高超声速飞行器控制中,但是奇异值问题亟待得到解决。
技术实现思路
1、为解决现有技术存在的问题,本发明提出一种高超声速飞行器纵向控制方法,该控制方法主要针对高超声速飞行器的纵向控制,即速度、高度、航迹角、攻角以及俯仰角速度控制。本发明在设计纵向控制器时,基于的是鲁棒控制理论,并设计了新的切换函数和自适应律来消除未知因素对控制效果的影响。此外,在设计攻角控制器时,本发明通过限制攻角控制器的幅值并结合误差补偿系统来消除攻角控制器饱和带来的不利影响。并通过一种全新的非对称转换函数来限制高超声速飞行器攻角跟踪误差。
2、本发明的技术方案为:
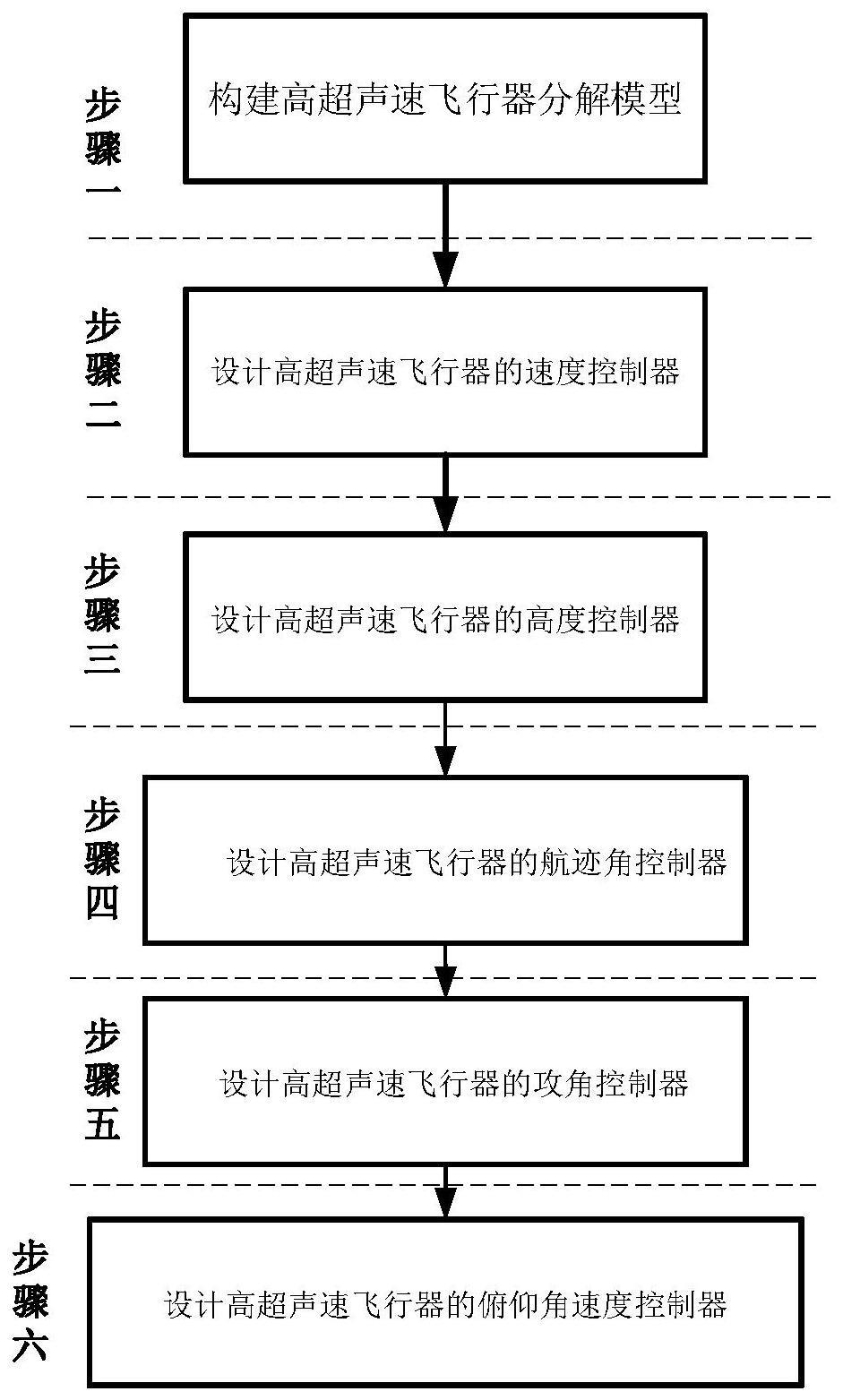
3、一种高超声速飞行器纵向控制方法,包括以下步骤:
4、步骤1:构建高超声速飞行器的纵向分解模型:
5、
6、其中v,h,γ,α,q分别为飞行器速度、高度、航迹角、攻角和俯仰角速度;f=[fv,fγ,fα,fq]t中各元素分别为飞行器速度、航迹角、攻角以及俯仰角速度受气动参数摄动和不可控弹性状态影响而产生的不确定项,gv和gq为标称气动参数计算得到的值,d=[dv,dh,dγ,dα,dq]中各元素分别为飞行器速度、高度、航迹角、攻角以及俯仰角速度的外界扰动值;φ为燃料当量比;δe为高超声速飞行器的升降舵舵偏角;φ和δe的值分别来自速度控制器和高度控制器的输入;
7、步骤2:设计高超声速飞行器的速度控制器:
8、步骤2.1:定义速度跟踪误差为:
9、ev=v-vref
10、式中,vref为人为设定的期望速度;根据纵向分解模型和速度跟踪误差公式得到:
11、
12、式中,为速度跟踪误差的一阶导数;
13、步骤2.2:假设未知项的上界为εv,用来表示εv的估计值,用表示εv的估计误差;将步骤2.1公式改写为:
14、
15、步骤2.3:φ来自速度控制器,设计高超声速飞行器的速度控制器φ为
16、
17、式中,p,kv1,kv2,kv3,σv为需要设计的控制器参数;sg()为符号函数;为切换函数;
18、步骤3:设计高超声速飞行器的高度控制器:
19、步骤3.1:定义高度跟踪误差为:
20、eh=h-href
21、式中,href为人为设定的期望高度;根据纵向分解模型和高度跟踪误差公式得到:
22、
23、步骤3.2:假设未知项的上界为εh,用来表示εh的估计值,用表示εh的估计误差;将步骤3.1公式改写为:
24、
25、步骤3.3:γ来自高度控制器,设计高超声速飞行器的高度控制器γ为:
26、
27、式中,kh1,kh2,kh3,σh为需要设计的控制器参数;为切换函数;
28、步骤4:设计高超声速飞行器的航迹角控制器:
29、步骤4.1:定义航迹角跟踪误差为:
30、eγ=γ-γref
31、式中,γref为期望的航迹角,根据步骤3.3设计的高度控制器计算得到;根据纵向分解模型和航迹角跟踪误差公式得到:
32、
33、步骤4.2:假设未知项的上界为εγ,用来表示εγ的估计值,用表示εγ的估计误差;将步骤4.1公式改写为:
34、
35、步骤4.3:α来自航迹角控制器,设计高超声速飞行器的航迹角控制器α为:
36、
37、式中,kγ1,kγ2,kγ3,σγ为需要设计的控制器参数;为切换函数;
38、步骤4.4:采用饱和函数αds来限制步骤4.3计算得到的αd:
39、
40、式中,αdm和αdm为攻角α的限制上下界;
41、步骤5:设计高超声速飞行器的攻角控制器:
42、步骤5.1:定义攻角跟踪误差为:
43、eα=α-αds
44、bα=αds-αref
45、式中,αref为期望的攻角,根据步骤4.3设计的航迹角控制器计算得到;根据纵向分解模型和攻角跟踪误差公式得到:
46、
47、步骤5.2:定义
48、zγ=eγ-zγ0
49、式中,zγ0通过下式得到:
50、
51、式中,sat(bα)为上下界分别为bαm和bαm的饱和函数,bαm和bαm为需要进行设计的参数;
52、步骤5.3:对zγ=eγ-zγ0进行求导,得到
53、
54、步骤5.4:对eα求导,得到
55、
56、假设未知项的上界为εα,用来表示εα的估计值,用表示εα的估计误差;将改写为q来自攻角控制器,设计高超声速飞行器的攻角控制器q为:
57、
58、式中,kα1,kα2,kα3,σα为正的设计参数;为切换函数;k(t)为非对称转换函数;γα为时变增益函数;
59、步骤6:设计高超声速飞行器的俯仰角速度控制器:
60、步骤6.1:定义俯仰角速度跟踪误差为:
61、eq=q-qref
62、式中,qref为期望的俯仰角速度,根据步骤5.4设计的攻角控制器计算得到;根据纵向分解模型和俯仰角速度跟踪误差得到:
63、
64、步骤6.2:假设未知项的上界为εq,用来表示εq的估计值,用表示εq的估计误差;将步骤6.1公式改写为:
65、
66、步骤6.3:δe来自俯仰角速度控制器,设计高超声速飞行器的俯仰角速度控制器δe为
67、
68、式中,kq1,kq2,kq3,σq为正的设计参数;为切换函数。
69、进一步的,切换函数的具体形式为
70、
71、其中0<q<1,τv为需要进行设计的参数;
72、切换函数的具体形式为
73、
74、式中τh为需要进行设计的参数;
75、切换函数的具体形式为
76、
77、式中τγ为需要进行设计的参数;
78、切换函数的具体形式为
79、
80、式中τα为需要进行设计的参数;
81、切换函数的具体形式为
82、
83、式中,τq为正的设计参数。
84、进一步的,估计值通过自适应率
85、
86、得到,式中lv1,lv2,lv3均为正的设计参数;
87、估计值通过自适应率
88、
89、得到,式中lh1,lh2,lh3均为正的设计参数;
90、步骤4中的估计值通过自适应率
91、
92、得到,式中lγ1,lγ2,lγ3均为正的设计参数;
93、步骤5中的估计值通过自适应率
94、
95、得到;
96、估计值通过自适应率
97、
98、得到,式中lα1,lα2,lα3均为正的设计参数;
99、估计值通过自适应率
100、
101、得到,式中lq1,lq2,lq3为正的设计参数。
102、进一步的,非对称转换函数k(t)具体形式为:
103、
104、进一步的,时变增益函数γα具体形式为:
105、
106、一种计算机可读存储介质,存储有计算机可执行程序,所述计算机可执行程序在被执行时用于实现上述方法。
107、一种计算机系统,包括:一个或多个处理器,上述计算机可读存储介质,用于存储一个或者多个程序,其中,当所述一个或者多个程序被所述一个或者多个处理器执行时,使得所述一个或者多个处理器实现上述方法。
108、有益效果
109、本发明提供的一种高超声速飞行器纵向控制方法,相比传统的控制方法,能够保证系统的跟踪误差和估计误差在固定时间内收敛,同时避免有限时间控制器所带来的奇异点问题。然后,本发明提供的一种高超声速飞行器纵向控制方法能够保证高超声速飞行器的攻角始终不超出预设的非对称时变限制。最后,相比于传统基于指数收敛的受限控制器,所设计控制器具有更好的抗干扰性能。
110、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!