固定翼无人机无卫导飞行方法、装置、系统及可读存储介质与流程
【】本发明涉及固定翼无人机导航与自主飞行控制,尤其涉及一种固定翼无人机无卫导飞行方法、装置、系统及可读存储介质。
背景技术
0、
背景技术:
1、近年来,固定翼无人机由于其机动性高,成本低等优点,是当前研究的热点之一,且逐渐向自动化、智能化方向发展。固定翼无人机要在各种复杂的任务环境中完成自主起飞、导航以及着陆等一系列任务,需要无人机具备统一的时空基准和时空信息。卫星导航设备是提供时空信息的主要设备,但是由于卫星信号的脆弱性和公开性,容易受到遮挡、多径、干扰、欺骗,形成gnss拒止环境。因此一旦卫星导航失效将会使无人机的安全起降和执行任务变得十分困难。
2、目前常用的飞行引导方式有:全球卫星导航系统(gnss)、ins惯性导航系统(ins)、视觉导航系统以及各种组合导航系统。gnss是一种自身定位系统,利用在轨卫星发射的无线电信号,依靠被动测距来确定无人机的三维位置;ins是一种推算导航系统,位置信息通过积分速度信息获取,速度信息通过对imu测量的加速度信息积分获得,姿态信息通过积分imu测量的角速率信息获得。ins具有数据速率快、短期精度高且可以提供位置、姿态等多种信息的特点成为组合导航研究领域中主要的传感器。
3、组合导航系统中ins/gnss是目前应用最为广泛的组合导航系统之一。但在gnss拒止环境下,无人机只能依靠惯导设备提供空间信息,ins误差会通过导航方程被不断积分,导致ins惯性导航解算精度随时间推移不断下降。系统无法通过gnss对ins惯性导航系统误差进行估计和校正。
4、视觉导航是近年来一种新兴的导航技术,视觉传感器具有抗干扰能力强、非接触、易于隐藏、功耗低、体积小等优点,成为替代gnss的一种很好的选择。视觉导航是一种先进的导航系统,利用视觉传感器获取图像信息,基于机器视觉算法提取图像特征信息,估计所需要的位姿参数进而实现目标跟踪、自主起降等任务。由此可见,利用视觉导航替代gnss是一种非常有前景的方案。但是视觉导航下视匹配时需要相对地面800米以上才能满足匹配视场要求,前视着陆匹配时需要在跑道合适的方位及高低角才能实现匹配,因此需要其他传感器辅助。
5、高度信息采集方面,气压高度抗干扰能力强,但是受温度等影响较大,不满足降落需求。gnss海拔高度准确性强,不受环境因素影响,但是容易被干扰和欺骗,在拒止环境下无法使用。激光雷达测量精确,不易受干扰,但是量程有限,只能测量相对200米以内高度。如何选择更加适合的导航系统以及如何在没有卫星信号或卫星导航的基础上,自动执行起飞、任务执行以及降落过程的导航过程成了一直无法解决的问题。
6、因此,有必要研究一种固定翼无人机无卫导飞行方法、装置、系统及可读存储介质来应对现有技术的不足,以解决或减轻上述一个或多个问题。
技术实现思路
0、
技术实现要素:
1、有鉴于此,本发明提供了一种固定翼无人机无卫导飞行方法、装置、系统及可读存储介质,涉及嵌入式系统和传感器网络,具体涉及gnss(全球卫星导航系统)拒止环境下固定翼无人机自主飞行控制策略,本发明深度融合纯ins惯性导航技术、视觉导航技术和传感器技术,通过摄像头感知三维空间的环境情况,并融合imu惯性测量、激光雷达高度测量和气压高度测量,解析出固定翼无人机的位姿信息,通过控制固定翼无人机在不同高度选用不同的组合导航方式,实现固定翼无人机的自主起降、飞行,具有极大的应用价值。
2、一方面,本发明提供一种固定翼无人机无卫导飞行方法,所述无卫导飞行方法包括:
3、s1:获取无人机周围的环境数据;
4、s2:通过环境数据获取无人机高度数据和姿态数据;
5、s3:预设无人机上搭载的下视导航设备和前视导航设备的工作高度;
6、s4:将无人机高度数据与预设的下视导航设备和前视导航设备的工作高度进行比较,根据比较结果和姿态数据获取无人机飞行阶段;
7、s5:预设ins惯性导航和视觉导航两种导航方式;
8、s6:根据无人机飞行阶段选择s5中的一种或多种组合的导航方式;
9、s7:根据姿态数据选择s5中的一种或多种组合的导航方式对无人机进行姿态修正。
10、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述s1中环境数据包括惯性测量imu高频测量的无人机的加速度和角速度信息、激光雷达高度计测量的高度信息、气压高度计测量的高度信息以及视觉传感器测量的三维空间信息。
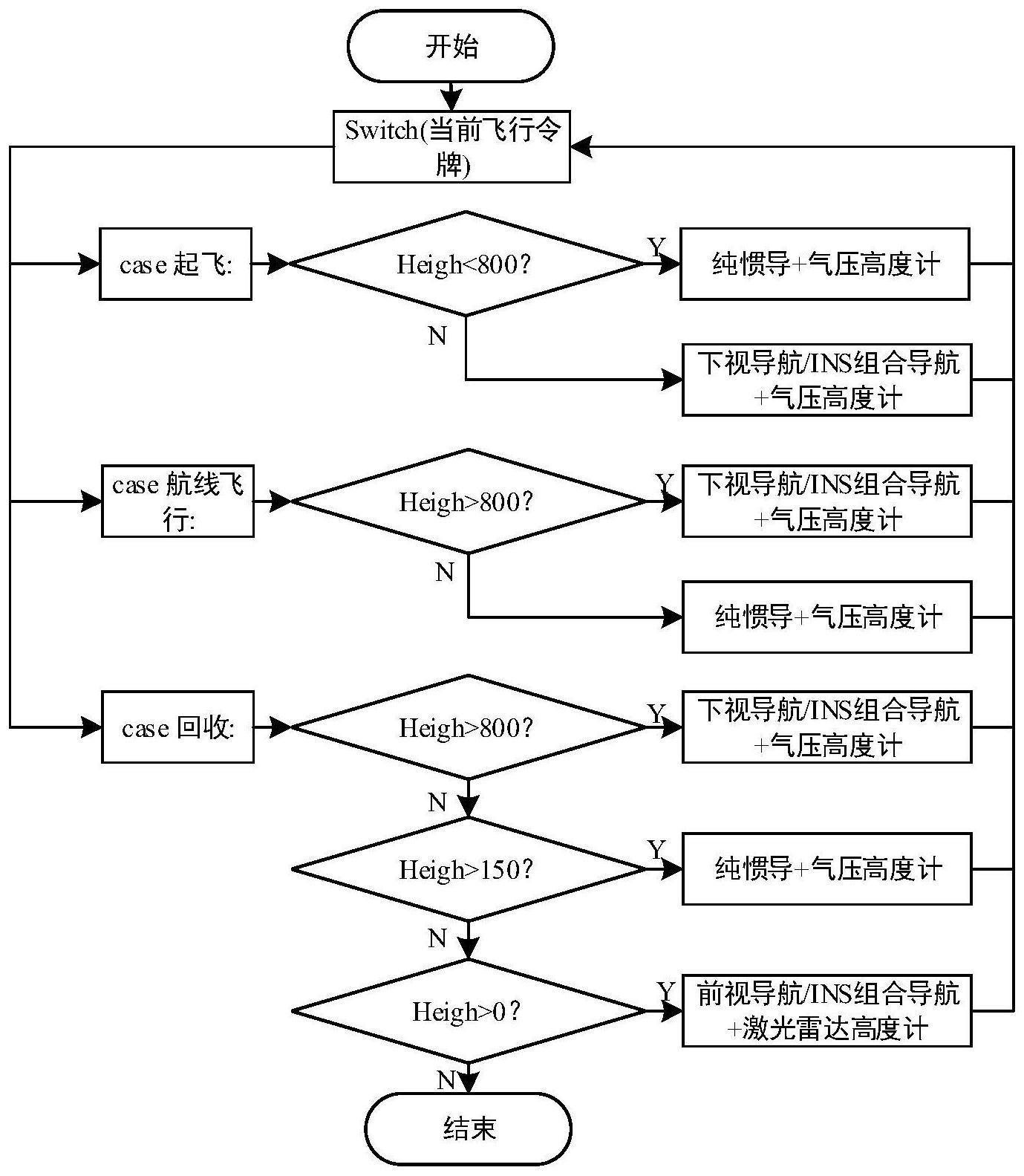
11、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述s4中无人机飞行阶段包括:
12、无人机起飞阶段,所述无人机起飞阶段满足无人机高度不超过下视导航设备的预设工作高度,姿态数据为起飞姿态;
13、执行任务阶段,所述执行任务阶段满足无人机高度不低于下视导航设备的预设工作高度;
14、回收阶段,所述回收阶段满足无人机高度不超过下视导航设备的预设工作高度,姿态数据为降落姿态。
15、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述s6具体为:
16、无人机起飞阶段,导航方式选用ins惯性导航的导航方式,高度数据选用气压高度计测量结果;
17、执行任务阶段,导航方式选用视觉导航与ins惯性导航组合的导航方式,高度数据选用气压高度计测量结果;
18、回收阶段:
19、无人机下降至下视导航设备的预设工作高度与前视导航设备的预设工作高度之间时,导航方式选用ins惯性导航的导航方式,高度数据选用气压高度计测量结果;
20、无人机到回收航线处且无人机降高至前视导航设备的预设工作高度以下时,导航方式选用视觉导航和ins惯性导航组合的导航方式,高度数据选用激光雷达高度计测量结果。
21、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,执行任务阶段时,s7中的姿态修正具体为:无人机通过视觉传感器测量的三维空间信息在实时飞行中完成对环境的感知和定位,根据匹配的位置实时修正ins惯性导航位置。
22、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,回收阶段时,s7中的姿态修正具体为:利用视觉导航对无人机姿态进行修正,使无人机降落在跑道上。
23、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述下视导航设备的预设工作高度为不低于800米,所述前视导航设备的工作高度为不超过150米。
24、如上所述的方面和任一可能的实现方式,进一步提供一种固定翼无人机无卫导飞行策略装置,所述无卫导飞行策略装置包括:
25、环境数据获取模块,用于获取无人机周围的环境数据;
26、高度数据和姿态数据获取模块,用于通过环境数据获取无人机高度数据和姿态数据;
27、工作高度预设模块,用于预设无人机上搭载的下视导航设备和前视导航设备的工作高度;
28、飞行阶段获取模块,用于将无人机高度数据与预设的下视导航设备和前视导航设备的工作高度进行比较,根据比较结果和姿态数据获取无人机飞行阶段;
29、导航预设模块,用于预设ins惯性导航和视觉导航两种导航方式;
30、导航选择模块,用于根据无人机飞行阶段选择视觉导航和ins惯性导航中的一种或多种组合的导航方式;
31、姿态修正模块,用于根据姿态数据选择视觉导航和ins惯性导航中的一种或多种组合的导航方式对无人机进行姿态修正。
32、如上所述的方面和任一可能的实现方式,进一步提供一种无卫导飞行策略系统,所述无卫导飞行策略系统包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行任一项所述的无卫导飞行方法。
33、如上所述的方面和任一可能的实现方式,进一步提供一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现任一项所述的无卫导飞行方法。
34、与现有技术相比,本发明可以获得包括以下技术效果:
35、1、本发明可在实时飞行中完成对环境的感知和定位,根据匹配的位置实时修正纯ins惯性导航位置,使其能够在无卫导情况下便可自主完成起飞、降落、路径规划,快速抵达任务目标点执行任务;
36、2、本发明提出ins/视觉导航系统的组合定位方法,还辅以激光雷达高度传感器和气压高度传感器,根据固定翼无人机在飞行阶段选用不同的导引方式,灵活且精准的引导无人机飞行,有效的摆脱了gnss的限制,此外交替融合了激光雷达高度测量和气压高度测量数据,有效的改善了高度方向估计精度不足的问题;
37、3、本发明在无人机平台上兼容性性强,除了imu、激光雷达高度计、气压高度计、视觉传感器,还可根据开发者自行添加传感器,或将该系统移植到其他无人机平台上,进行二次开发。
38、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有技术效果。
- 还没有人留言评论。精彩留言会获得点赞!