一种量测不完备下的航天器抗干扰安全避障控制方法
本发明属于航天器控制领域,具体涉及一种量测不完备下的航天器抗干扰安全避障控制方法。
背景技术:
1、航天器安全接近非合作目标是在轨维修、燃料加注、目标捕获等重要空间任务的基石,由于物理结构以及任务条件的限制,空间任务对于航天器操控的安全性、可靠性以及精确性要求非常高。然而航天器在接近控制中,目标所携带的太阳帆板等部件以及周围存在的伴飞航天器阻碍航天器接近路径,给航天器的安全性带来威胁,因此,要求航天器具备有效的自主避障能力;另一方面,一般服务航天器由于成本限制或者敏感器适用场景限制,相对速度量测信息很难可靠、准确地获取,这对航天器接近控制系统的状态估计技术提出了新要求。此外,航天器所携带的挠性部件产生的振动扰动与系统状态耦合,对航天器接近的控制精度以及系统稳定性产生严重影响,进一步阻碍了空间任务的实施;而且客观存在的外部干扰也同样在稳定性、可靠性以及精确性方面给控制系统带来了负担,增加了控制系统的设计难度。在这种多约束以及多源干扰下的航天器接近控制系统,对多源干扰的精细补偿以及多约束下的协调优化控制势在必行。
2、目前,对于航天器接近控制的研究大多只考虑了障碍物约束,文献《一种基于自适应种群变异鸽群优化的航天器集群轨道规划方法》提出一种基于自适应种群变异的鸽群算法,有效解决了航天器轨道控制中存在演化停滞以及易陷入局部最优解问题,实现了优化避障控制,但是忽略了量测信息约束以及多源干扰的影响。中国专利申请cn202110920560.9中考虑了干扰的影响,基于势函数设计了有限时间避障控制器,但忽略了多源干扰对系统的影响,具有保守性。专利号为cn201910068889.x中采用无迹变化法推演干扰的影响,结合与障碍物碰撞的概率密度函数解算输出力,实现航天器的安全接近,但对于算法的算力要求较高,难以直接应用于实际系统。文献《考虑输入受限的航天器安全接近姿轨耦合控制》基于积分滑模控制理论设计了抗饱和的有限时间自适应控制器,利用自适应抑制了干扰对系统的影响,结合避碰函数实现了避障控制。
3、综上所述,现有研究虽然取得了一些进展,但是对于航天器接近控制的分析与设计仍存在局限性,通常忽略了相对速度量测不完备以及多源干扰的影响,降低了控制系统的可靠性与鲁棒性,并且牺牲了控制精度,因此,亟需突破在相对速度量测不完备且受到挠性振动、外部干扰下的航天器安全避障控制技术。
技术实现思路
1、为解决现有技术中障碍物约束、相对速度量测不完备、挠性振动以及外部干扰这种多约束以及多源干扰下航天器安全接近非合作目标的控制问题,弥补现有技术在相对速度量测不完备以及多源干扰处理方面的缺失,本发明提出一种量测不完备下的航天器抗干扰安全避障控制方法,实现在相对速度量测不完备且受到挠性振动、外部干扰影响下的安全避障控制。通过设计自适应固定时间观测器,对量测不完备的相对速度以及多源干扰进行快速估计;通过设计高斯人工势函数,构造系统跟踪误差,将障碍物约束问题转化为系统跟踪问题;结合自适应固定时间观测器以及系统跟踪误差设计复合控制器,保证航天器在避障的同时对多源干扰进行精细补偿,实现航天器高精度跟踪期望停泊点,有效提高控制系统的可靠性、稳定性与精确性。
2、为达到上述目的,本发明采用的技术方案为:
3、一种量测不完备下的航天器抗干扰安全避障控制方法,包括以下步骤:
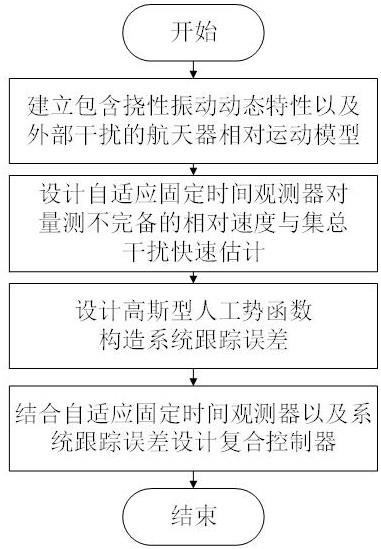
4、第一步,建立包含挠性振动动态以及外部干扰的航天器相对运动耦合动力学模型,通过挠性振动与外部干扰的集总表征与分析,将耦合动力学模型转化为面向控制的航天器相对运动模型;
5、第二步,针对量测不完备的相对速度信息以及集总干扰,设计自适应固定时间观测器,实现对相对速度以及集总干扰的同时估计;
6、第三步,针对接近过程中存在的障碍物,利用航天器相对位置信息以及障碍物位置信息设计人工势函数,并基于人工势函数构造系统跟踪状态,将障碍物约束问题转化为系统跟踪问题;
7、第四步,结合自适应固定时间观测器以及系统跟踪状态构造复合控制器,完成量测不完备下航天器抗干扰安全避障控制方法设计。
8、进一步地,所述第一步的具体步骤如下:
9、(1) 建立包含挠性振动动态以及外部干扰的航天器相对运动耦合动力学模型:
10、,
11、其中,表示航天器的质量;表示航天器在目标轨道系下的位置矢量;表示相对速度,为量测不完备的状态量,表示相对加速度;表示挠性附件的模态坐标矢量,表示挠性模态变化率,表示挠性模态变化加速度;表示三轴控制力;表示外部环境干扰;为惯性系下刚柔耦合矩阵;为目标轨道系下的刚柔耦合矩阵,表示的转置;表示由所组成的对角矩阵,与分别表示挠性附件的阻尼系数与模态频率,;表示由所组成的对角矩阵;矩阵,分别表示如下:
12、,
13、,
14、其中,表示地球引力常数;表示非合作目标的地心距;与分别为目标所在轨道的瞬时轨道角速度与角加速度,满足如下动态特征:
15、,
16、其中,,,分别表示目标所在轨道的半长轴、离心率以及真近点角。
17、此外,模型中的是惯性系下航天器位置矢量的加速度,满足如下动态:
18、,
19、其中,表示航天器的地心距;表示的转置;表示惯性系到目标轨道系的变换矩阵,表示的转置;
20、(2) 通过挠性振动与外部干扰的集总表征与分析,将耦合动力学模型转化为面向控制的航天器相对运动模型:
21、将挠性振动与外部干扰合并为集总干扰,记为,表示如下:
22、,
23、其中,为非线性项;表示的单位矩阵。
24、由于外部干扰、模态坐标矢量及其变化率均为有界变量,因此,找到一组正数,以及使得下式成立:
25、,
26、其中,,以及分别为,,的范数;
27、将集总干扰代入耦合动力学模型中,得到面向控制的航天器相对运动模型为:
28、,
29、其中,表示航天器的相对速度,为量测不完备状态量,并且受到最大安全相对速度的限制,即。
30、进一步地,所述第二步包括:
31、针对量测不完备的相对速度信息以及集总干扰,构造如下自适应固定时间观测器对相对速度以及干扰进行同时估计:
32、,
33、其中,,以及分别表示对,以及的估计值;,以及分别表示,以及对时间的导数;为常数;,为注入项;,,均为大于0的常数,;和均为大于1的常数,,且与均为大于0的奇数;,表示的第个元素,;表示的第个元素,表示符号运算;,表示的第个元素,表示对应元素的次方;而,表示的第个元素。此外,表示对干扰导数上界的估计值,且满足自适应律为:
34、,
35、其中,表示对时间的导数,和均为大于0的常数。
36、进一步地,所述第三步包括:所述人工势函数为高斯型人工势函数;
37、设计高斯型人工势函数为:
38、,
39、其中,表示航天器的相对位置误差,表示期望停泊点位置;表示第个障碍物的位置矢量;,以及均为适维正定对称矩阵;,为待设计参数;表示指数运算。
40、基于高斯型人工势函数构造系统跟踪误差,将障碍物约束问题转化为系统跟踪问题:
41、,
42、其中,为常数;表示对的梯度运算,表示的转置。
43、进一步地,所述第四步包括:
44、设计的复合控制器为三轴控制力信号,表示为:
45、,
46、其中,表示对的求偏导运算;,;状态及其导数为以下低通滤波器的输出:
47、,
48、其中,为时间常数;为虚拟控制信号,且满足
49、,
50、其中,表示对求偏导,表示对求偏导;为大于0常数;,为大于0的控制参数;,表示的上界。
51、本发明与现有技术相比的优点在于:本发明涉及一种量测不完备下的航天器抗干扰安全避障控制方法,针对现有接近控制方法对相对速度量测不完备以及多源干扰分析与处理方面的不足,本发明考虑障碍物约束、相对速度量测不完备、挠性振动以及外部干扰这种多约束与多源干扰下,建立包含挠性振动动态以及外部干扰的航天器相对运动耦合动力学模型,设计自适应固定时间观测器对不可测的相对速度以及多源干扰进行快速估计,有效解决了现有研究对相对速度状态量精确已知的依赖,利用自适应在线学习干扰导数的上界,克服了一般固定时间观测器对干扰导数上界已知的假设;另一方面,在控制器设计中,利用动态面简化了控制器的复杂程度,有效避免了对人工势函数求导带来的微分爆炸问题,而且通过复合结构设计,对多源干扰进行了精确补偿,实现了航天器接近非合作目标的高精度控制,具有高可靠性、强鲁棒性的特点,适用于航天器安全避障控制、无人系统路径跟踪控制以及精密机电伺服等领域。
- 还没有人留言评论。精彩留言会获得点赞!