一种轮速修正方法、系统以及车辆与流程
本技术涉及自动驾驶,特别是一种轮速修正方法、系统以及车辆。
背景技术:
1、目前,在自动驾驶领域,多采用传统组合导航框架对rtk(real-time kinematic实时动态差分定位)位姿观测值和imu(inertial measurement unit惯性策略单元)惯性测量值进行松耦合,以实现对车辆的定位,但是,rtk受环境影响大,在遮挡、半遮挡,以及电磁波信号受到干扰的情况下定位精度差,并且imu由于受到传感器测量精度的影响,其惯性测量值含有噪声,长时间积分会有累积误差,在定位中必须要考虑的噪声量为零偏和随机游走,因此,上述组合导航框架下的定位技术在遇到隧道、连续高架、收费站等特殊路况时,无法提供精确的纵向定位精度。
2、针对上述问题,本技术提出了一种轮速修正方法。
技术实现思路
1、鉴于上述问题,本技术实施例提供了一种轮速修正方法、系统以及车辆,以解决现有的传统组合导航框下的定位技术无法在隧道、连续高架、收费站等特殊路况提供精确的纵向定位精度的问题。
2、本技术实施例第一方面,提供了一种轮速修正方法,所述方法包括:
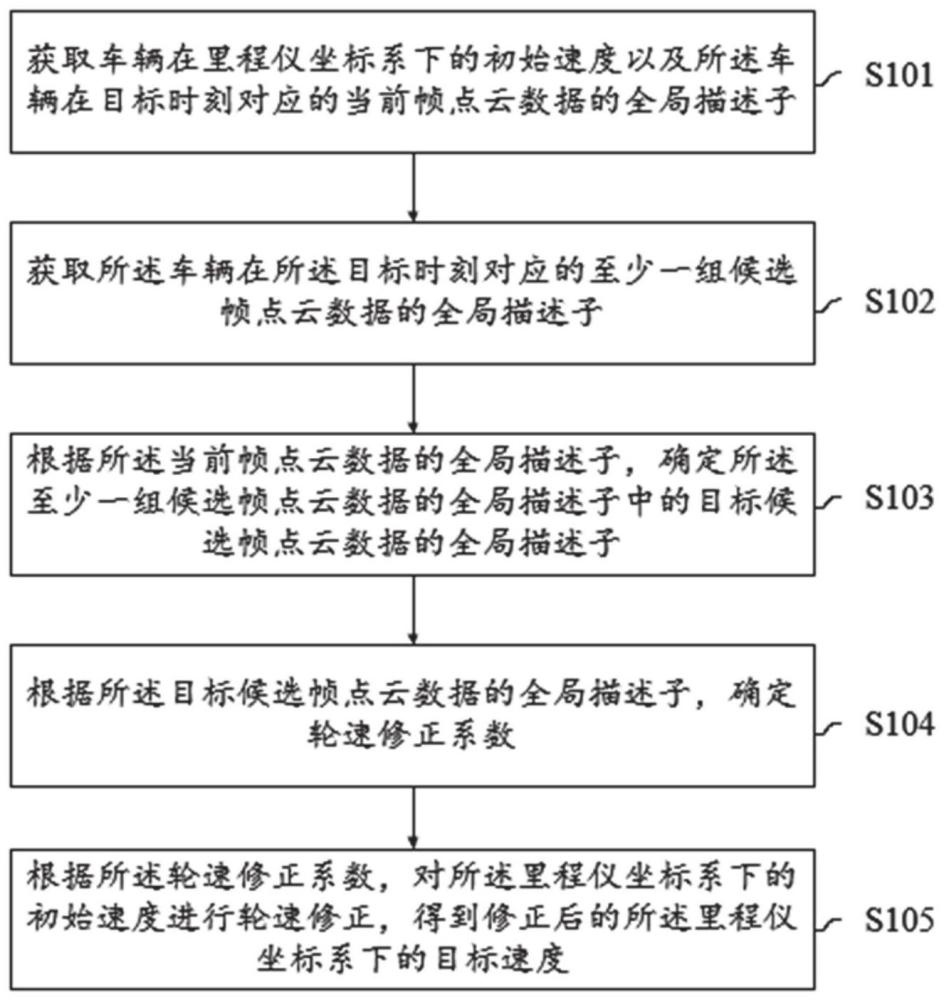
3、获取车辆在里程仪坐标系下的初始速度以及所述车辆在目标时刻对应的当前帧点云数据的全局描述子;
4、获取所述车辆在所述目标时刻对应的至少一组候选帧点云数据的全局描述子;
5、根据所述当前帧点云数据的全局描述子,确定所述至少一组候选帧点云数据的全局描述子中的目标候选帧点云数据的全局描述子;
6、根据所述目标候选帧点云数据的全局描述子,确定轮速修正系数;
7、根据所述轮速修正系数,对所述里程仪坐标系下的初始速度进行轮速修正,得到修正后的所述里程仪坐标系下的目标速度。
8、可选地,根据所述轮速修正系数,对所述里程仪坐标系下的初始速度进行轮速修正,得到修正后的所述里程仪坐标系下的目标速度之后,还包括:
9、根据所述修正后的所述里程仪坐标系下的目标速度,确定修正后的导航仪坐标系下的目标速度;
10、根据所述修正后的导航仪坐标系下的目标速度,确定所述车辆的当前位置和姿态。
11、可选地,所述根据所述目标候选帧点云数据的全局描述子,确定轮速修正系数,包括:
12、获取所述车辆在第一目标时刻对应的第一目标候选帧点云数据的第一全局描述子和所述车辆在第二目标时刻对应的第二目标候选帧点云数据的第二全局描述子;
13、根据所述第一全局描述子和所述第二全局描述子各自对应的位置坐标,确定所述车辆的位置增量;
14、根据所述车辆的位置增量,确定所述轮速修正系数。
15、可选地,所述根据所述车辆的位置增量,确定所述轮速修正系数,包括:
16、将所述位置增量输入到滑动窗口修正目标函数中,确定所述轮速修正系数;
17、所述滑动窗口修正目标函数如以下公式所示:
18、
19、其中,为滑动窗口修正目标函数的最小值对应的修正系数;为位置增量;为姿态矩阵;δkd为滑动窗口修正目标函数的修正系数;为里程仪速度;dt为时间。
20、可选地,所述根据所述当前帧点云数据的全局描述子,确定所述至少一组候选帧点云数据的全局描述子中的目标候选帧点云数据的全局描述子,包括:
21、将所述至少一组候选帧点云数据的全局描述子与所述当前帧点云数据的全局描述子进行配准,确定所述至少一组候选帧点云数据的全局描述子与所述当前帧点云数据的全局描述子之间的相似度;
22、根据所述至少一组候选帧点云数据的全局描述子与所述当前帧点云数据的全局描述子之间的相似度,确定所述目标候选帧点云数据的全局描述子。
23、可选地,所述获取所述车辆在所述目标时刻对应的至少一组候选帧点云数据的全局描述子,包括:
24、获取所述车辆在所述目标时刻对应的至少一组初选帧点云数据的全局描述子;
25、对所述至少一组初选帧点云数据的全局描述子进行初步检索,得到所述至少一组候选帧点云数据的全局描述子。
26、可选地,所述根据所述修正后的所述里程仪坐标系下的目标速度,确定修正后的导航仪坐标系下的目标速度,包括:
27、获取所述车辆的姿态矩阵;
28、根据所述车辆的姿态矩阵,将所述修正后的所述里程仪坐标系下的目标速度转化为所述修正后的所述导航仪坐标系下的目标速度。
29、可选地,所述根据所述轮速修正系数,对所述里程仪坐标系下的初始速度进行轮速修正,得到修正后的所述里程仪坐标系下的目标速度,包括:
30、识别所述车辆当前的路况;
31、在所述车辆当前的路况为特殊路况的情况下,对所述车辆在所述里程仪坐标系下的初始速度进行轮速修正,得到修正后的所述里程仪坐标系下的目标速度,其中,所述特殊路况表征所述路况中包含隧道、匝道、高架、龙门架、收费站、标志牌中的至少一者。
32、本技术实施例第二方面,提供了一种轮速修正系统,所述系统包括:
33、第一获取模块,用于获取车辆在里程仪坐标系下的初始速度以及所述车辆在目标时刻对应的当前帧点云数据的全局描述子;
34、第二获取模块,用于获取所述车辆在所述目标时刻对应的至少一组候选帧点云数据的全局描述子;
35、第一确定模块,用于根据所述当前帧点云数据的全局描述子,确定所述至少一组候选帧点云数据的全局描述子中的目标候选帧点云数据的全局描述子;
36、第二确定模块,根据所述目标候选帧点云数据的全局描述子,确定轮速修正系数;
37、修正模块,用于根据所述轮速修正系数,对所述里程仪坐标系下的初始速度进行轮速修正,得到修正后的所述里程仪坐标系下的目标速度。
38、可选地,根据所述轮速修正系数,对所述里程仪坐标系下的初始速度进行轮速修正,得到修正后的所述里程仪坐标系下的目标速度之后,还包括:
39、第三确定模块,用于根据所述修正后的所述里程仪坐标系下的目标速度,确定修正后的导航仪坐标系下的目标速度;
40、第四确定模块,用于根据所述修正后的导航仪坐标系下的目标速度,确定所述车辆的当前位置和姿态。
41、可选地,所述根据所述目标候选帧点云数据的全局描述子,确定轮速修正系数,所述第二确定模块,包括:
42、第一获取子模块,用于获取所述车辆在第一目标时刻对应的第一目标候选帧点云数据的第一全局描述子和所述车辆在第二目标时刻对应的第二目标候选帧点云数据的第二全局描述子;
43、第一确定子模块,用于根据所述第一全局描述子和所述第二全局描述子各自对应的位置坐标,确定所述车辆的位置增量;
44、第二确定子模块,用于根据所述车辆的位置增量,确定所述轮速修正系数。
45、可选地,所述根据所述车辆的位置增量,确定所述轮速修正系数,所述第二确定子模块,包括:
46、第一确定子单元,用于将所述位置增量输入到滑动窗口修正目标函数中,确定所述轮速修正系数;
47、所述滑动窗口修正目标函数如以下公式所示:
48、
49、其中,为滑动窗口修正目标函数的最小值对应的修正系数;为位置增量;为姿态矩阵;δkd为滑动窗口修正目标函数的修正系数;为里程仪速度;dt为时间。
50、可选地,所述根据所述当前帧点云数据的全局描述子,确定所述至少一组候选帧点云数据的全局描述子中的目标候选帧点云数据的全局描述子,所述第一确定模块,包括:
51、第三确定子模块,用于将所述至少一组候选帧点云数据的全局描述子与所述当前帧点云数据的全局描述子进行配准,确定所述至少一组候选帧点云数据的全局描述子与所述当前帧点云数据的全局描述子之间的相似度;
52、第四确定子模块,用于根据所述至少一组候选帧点云数据的全局描述子与所述当前帧点云数据的全局描述子之间的相似度,确定所述目标候选帧点云数据的全局描述子。
53、可选地,所述获取所述车辆在所述目标时刻对应的至少一组候选帧点云数据的全局描述子,所述第二获取模块,包括:
54、第二获取子模块,用于获取所述车辆在所述目标时刻对应的至少一组初选帧点云数据的全局描述子;
55、获得子模块,用于对所述至少一组初选帧点云数据的全局描述子进行初步检索,得到所述至少一组候选帧点云数据的全局描述子。
56、可选地,所述根据所述修正后的所述里程仪坐标系下的目标速度,确定修正后的导航仪坐标系下的目标速度,包括:
57、第三获取子模块,用于获取所述车辆的姿态矩阵;
58、转化子模块,用于根据所述车辆的姿态矩阵,将所述修正后的所述里程仪坐标系下的目标速度转化为所述修正后的所述导航仪坐标系下的目标速度。
59、可选地,所述根据所述轮速修正系数,对所述里程仪坐标系下的初始速度进行轮速修正,得到修正后的所述里程仪坐标系下的目标速度,所述修正模块,包括:
60、识别子模块,用于识别所述车辆当前的路况;
61、修正子模块,用于在所述车辆当前的路况为特殊路况的情况下,对所述车辆在所述里程仪坐标系下的初始速度进行轮速修正,得到修正后的所述里程仪坐标系下的目标速度,其中,所述特殊路况表征所述路况中包含隧道、匝道、高架、龙门架、收费站、标志牌中的至少一者。
62、本技术实施例的第三方面,提供了一种车辆,所述车辆包括如本技术实施例第二方面所述的轮速修正系统。
63、本技术具有以下优点:
64、本技术实施例提供了一种轮速修正方法,所述方法包括:获取车辆在里程仪坐标系下的初始速度以及所述车辆在目标时刻对应的当前帧点云数据的全局描述子;获取所述车辆在所述目标时刻对应的至少一组候选帧点云数据的全局描述子;根据所述当前帧点云数据的全局描述子,确定所述至少一组候选帧点云数据的全局描述子中的目标候选帧点云数据的全局描述子;根据所述目标候选帧点云数据的全局描述子,确定轮速修正系数;根据所述轮速修正系数,对所述里程仪坐标系下的初始速度进行轮速修正,得到修正后的所述里程仪坐标系下的目标速度。本技术通过对里程仪坐标系下的初始速度进行轮速修正,提高了里程仪坐标系下的初始速度的精确度,进而提高了纵向定位的精确度。
- 还没有人留言评论。精彩留言会获得点赞!