一种基于底盘模块化的全局系统状态在线判定方法与流程
本发明属于大数据融合与车辆底盘控制,具体涉及一种基于底盘模块化的全局系统状态在线判定方法。
背景技术:
1、随着底盘线控化、模块化与智能化趋势的不断深化,多变无人环境与复杂路面条件下车辆底盘系统的在线稳定性判定、动力学控制以及多模块化协同作用成为当前研究的热点与方向。在实际的环境中,车辆系统状态会跟随外界因素发生动态变化,在有人驾驶的车辆中,驾驶员会根据外界环境的变化适时决策并对驾驶操纵行为做出相应的调整,此时车辆底盘系统的能动性相对较差,只要随动以保持车辆的稳定性,满足实际的使用需求即可。而与此相反,在高级辅助驾驶以及无人车辆的研究领域与发展方向中,人的作用与其对系统的干预度进一步被降低,驾驶员更多地远离了决策过程,以车辆底盘自身的控制系统为主。车辆底盘是一个多模块化的系统,各模块的信息互相影响,关系复杂;且随着系统时间推移,各模块因时间、环境条件造成的信息融合度变得更复杂,进一步提高了分析的难度。因此,在庞大的信息架构下,如何在繁冗的多维度信息中提取有效信息,剔除无效信息,进而实现动态判定、在线决策是一个亟待研究的技术问题。
技术实现思路
1、有鉴于此,本发明提出一种基于底盘模块化的全局系统状态在线判定方法,能够动态判定车辆驾驶状态并进行在线决策,辅助车辆控制。
2、实现本发明目的的技术方案为:
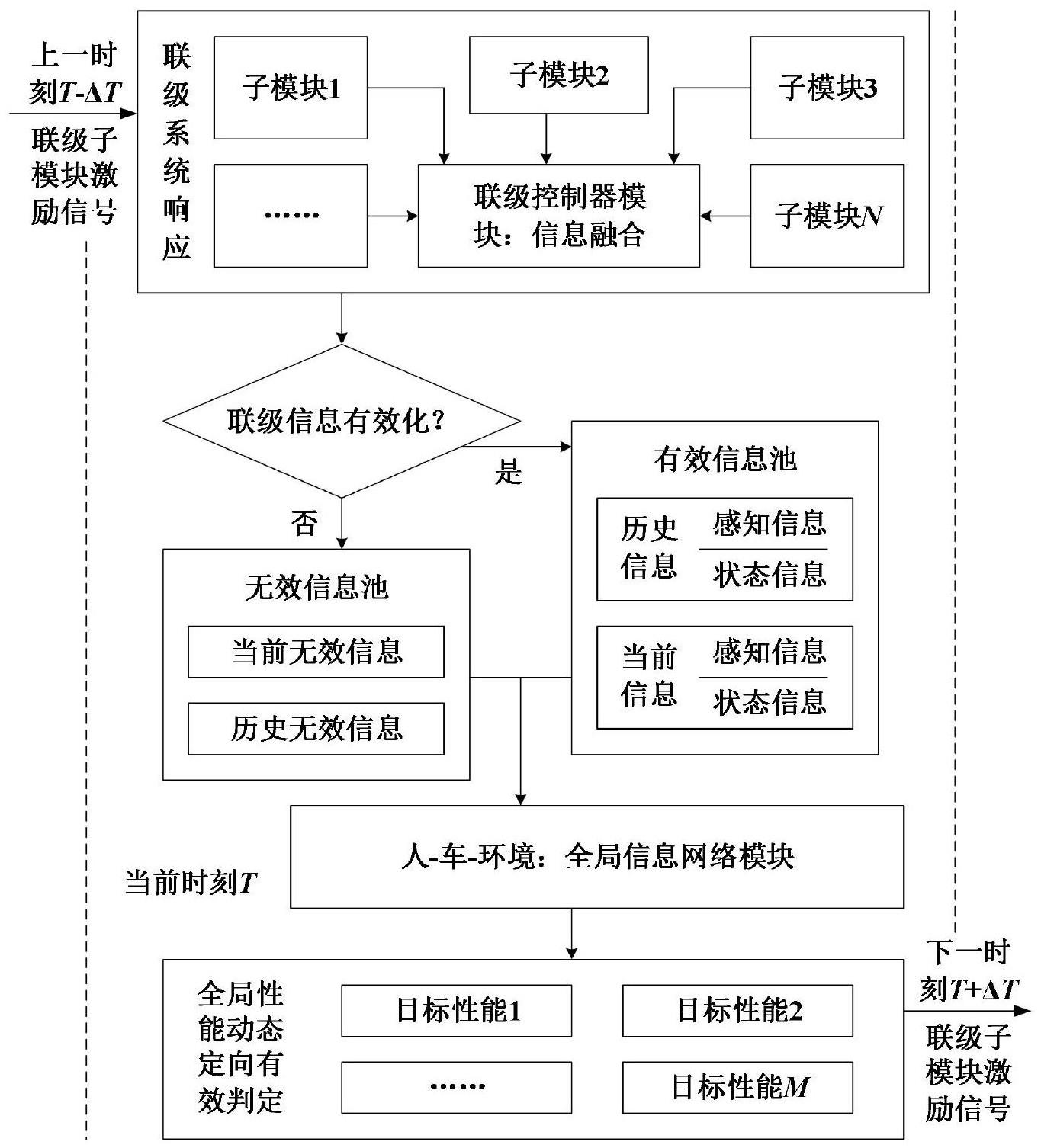
3、一种基于底盘模块化的全局系统状态在线判定方法,步骤包括:
4、步骤1、根据当前时刻t和历史时刻t-δt底盘的各个子模块传感器的响应数据集,计算当前时刻t时的响应数据集的容差值,与预设的目标容差值比较,当容差值未超过目标容差值时,基于当前时刻的响应数据集计算融合数据集,进入步骤2;当容差值超过目标容差值时,对时间步长δt进行动态寻优,得到最大有效步长δtmax,更新历史时刻为t-δtmax,返回步骤1开头继续执行。
5、步骤2、计算融合数据集及其各子集的标准差,构建标准差矩阵;计算标准差矩阵中各个标准差的概率,构建概率矩阵,获取标准差矩阵中的最大标准差及其对应的融合数据集中的子集将作为融合数据集的特征进行反演运算,获取无效反演响应数据集并计算融合数据集的信息无效率η;分析中包含的响应数据对应的子模块数量,结合信息无效率η判定底盘状态,并根据底盘状态进行决策,完成全局系统状态的在线判定。
6、进一步的,根据当前时刻t和历史时刻t-δt底盘的各个子模块传感器的响应数据集,计算当前时刻t时的响应数据集的容差值的具体方式为:
7、对当前时刻t和历史时刻t-δt时底盘的各个子模块传感器的响应数据集进行维度统一化处理,得到当前时刻t的响应数据矩阵及历史时刻t-δt的响应数据变化率矩阵
8、根据和计算传感器的容差值ω,其表达式为:
9、
10、其中,n=1,2,...,n为子模块的序号,n为子模块的总数,为当前时刻t下第n个子模块的响应数据矩阵,为历史时刻t-δt下第n个子模块的响应数据变化率矩阵。
11、进一步的,基于当前时刻t的响应数据集计算融合数据集的具体方式为:
12、根据目标容差值γ、容差值ω、当前时刻t的响应数据矩阵及历史时刻t-δt的响应数据变化率矩阵计算融合数据集其表达式为:
13、
14、其中,为融合数据集中第n个子模块对应的子集。
15、进一步的,对时间步长δt进行动态寻优的具体方式为:
16、改变时间步长δt=δtj,δtj为第j个时间步长变量;根据当前时刻t的响应数据集和时刻t-δtj的响应数据集建立其动态约束条件jj,其表达式为:
17、
18、其中,erj为第j个时间步长对应的动态约束函数,为当前时刻t的原始响应数据集中第i个子模块对应的子集,为时刻t-δtj的原始响应数据集中第i个子模块对应的子集,为的一阶微分;j=1,2,3...,l为时间步长的编号,l为时间步长总数;i=1,2,...,n为子模块的序号,δ为冗余误差。
19、根据时刻t-δtj的响应数据集计算动态约束函数值,选取动态约束函数值超过冗余误差δ的任一时间步长δt1作为下限,选取动态约束函数值不超过冗余误差δ的任一时间步长为上限δt2,建立寻优区间[δt1,δt2];取上限和下限的均值δt3并计算其约束函数值er3,当er3>δ时更新寻优区间为[δt3,δt2],当er3≤δ时更新寻优区间为[δt1,δt3];建立时间步长的梯度函数,在更新后的寻优区间内求解最大值,作为最大有效步长δtmax,其表达式为:
20、
21、其中,为预设的正数。
22、进一步的,步骤2的具体方式为:
23、融合数据集经k次数据划分得到k×k组子集,计算每次数据划分的每个子集的标准差;k根据融合数据集的维度选取,其表达式为:
24、
25、根据每次数据划分的每个子集的标准差,构建标准差矩阵计算标准差矩阵中每个标准差的概率,构建概率矩阵将标准差矩阵与概率矩阵点乘,得到标准差矩阵中的最大元素smax;根据最大元素smax找到其对应的数据划分前的子集对和分别进行反演运算,得到响应信息集在当前时刻t时的反演结果和无效子集两者相减得到有效子集
26、计算信息无效率η,其表达式为:
27、
28、其中,numi为无效子集包含的响应数据的总数,numv为有效子集包含的响应数据的总数。
29、进一步的,分析中包含的响应数据对应的子模块数量,结合信息无效率η判定底盘状态,并根据底盘状态进行决策,完成全局系统状态的在线判定的具体方式为:
30、当只包含1个子模块的响应数据时,以信息无效率η的取值范围分为三种情况:当信息无效率η∈(68%,100%],对无效子集对应的子模块的状态做在线动态分析;当信息无效率η∈(45%,68%]且持续时间超过10个控制响应周期长度tc,对对应的子模块启动故障诊断,同时将车速降低至40km/h以下;当信息无效率η∈[0%,45%],对车辆的全局系统进行故障排查,同时停车。
31、当只包含2个子模块的响应数据时,以信息无效率η的取值范围分为三种情况:当信息无效率η∈(64%,100%],对对应的子模块的状态做在线动态分析;当信息无效率η∈(40%,64%]且持续时间超过5个控制响应周期长度tc,对对应的子模块启动故障诊断,同时将车速降低至35km/h以下;当信息无效率η∈[0%,40%],对车辆的全局系统进行故障排查,同时停车。
32、当包含于大于2个子模块的响应数据时,以信息无效率η的取值范围分为三种情况:当信息无效率η∈(60%,100%],将响应数据的采样率增大为上个时间周期内采样率的5倍,检查响应数据的尖峰信号,对对应的子模块的状态做在线动态分析;当信息无效率η∈(40%,60%]且持续时间超过5个控制响应周期长度tc,对对应的子模块启动故障诊断,同时在15s内将车速降低至30km/h以下;当信息无效率η∈[0%,40%],对车辆的全局系统进行故障排查,同时停车。
33、有益效果:
34、1、本发明提出一种基于底盘模块化的全局系统状态在线判定方法,基于目标容差值和时间步长的动态寻优,实现多模块传感器的数据融合;通过融合信息数据集的标准差计算提取其统计特征,划分有效与无效数据,并进行反演计算,得到有效的原始响应数据和无效的原始响应数据,在此基础上可以得到针对各模块响应数据的信息无效率,完成对底盘子模块状态与系统全局性能的动态判定和在线决策。
35、2、在计算容差值前,考虑到同一时刻下的各子模块的响应数据存在维度不一致的问题,本发明先将所有响应数据集的维度统一化处理,减小计算量,提高计算速度。
36、3、本发明综合考虑当前时刻t的原始响应数据集、时间步长变量和原始响应数据集的变化率建立动态约束函数,寻找既符合冗余误差约束,又使融合速度最高的最大有效步长。
37、4、本发明采用随机、多次分组的形式构建标准差矩阵,以更好地提取融合数据集的统计学特征,为区分有效数据和无效数据做技术铺垫,并由区分结果计算信息无效率。
38、5、为了保证信息池的可靠性,本发明需要在多数据、多模块且各模块互相耦合的情况下,尽可能多地提取底盘的响应数据,以更全面地分析底盘状态。
- 还没有人留言评论。精彩留言会获得点赞!