一种无人船系统的航向保持非脆弱容错控制方法
本发明属于容错控制领域,具体涉及一种无人船系统的航向保持非脆弱容错控制方法。
背景技术:
1、在近几十年间,无人控制系统逐步应用在大众视野中。随着人工智能与大数据网络时代的发展,船舶的应用也开始从传统的方式向着无人化和模块化发展,因此无人船舶的研究无论是对于民众还是军方都是相当重要的。一方面,它可以进行远洋探测、深海打捞、水质勘探、资源发掘等等;另一方面,它还可以进行近海防卫、远海巡航、抢滩登陆、海上拦截等等。与普通船舶相比,无人船应用领域更加广泛,模块化程度更高,船型也更多种多样以及诸如此类的许多优势。但当其暴露于强风、巨浪、激流中时,它的非线性,内部参数待定等特点使控制器的设计相当困难。因此,研究具有不确定性的无人船运动控制具有重要意义。
2、无人船系统运行时,难免有各种各样的故障,可能会影响到无人船系统的正常运作,甚至可能令其面对未知的风险。因此,对无人船航向保持控制使用容错控制的方法具有重要意义。在实际运行系统中,一些故障往往服从以下概率分布特征:执行机构大多数情况下只会发生微小故障,发生严重故障的概率非常低。运用这一特征,可以根据故障分布来将故障分割在不同的区间进行下一步研究,从而更加接近执行机构真实运行情况。
3、实际系统中,外部扰动导致的控制器参数不稳定的问题,使得控制器很难精准输出控制信号。脆弱的控制器与一些故障的叠加,可能会使得系统的性能水平严重降低。因此,针对控制器的非脆弱控制思想成为了一个重要议题。但是,对于无人船航向控制的研究还很少。控制器增益摄动通常分为乘性扰动和加性扰动两种方式。实际上,控制器参数摄动情况多种多样,这就要求了非脆弱控制方案必须完备。
技术实现思路
1、针对现有技术不足,本发明研究了内部参数具有不确定性的无人船系统的航向保持非脆弱容错控制问题,主要根据船舶的运动学特征,建立了带有无人船参数不确定性的运动学模型,并结合无人船舵机特性和pid控制方案,与实测数据进行了模型匹配实验;还根据故障发生的随机分布特征,从而建立部分失效故障的随机分布模型;参考控制器增益扰动特征,在设计控制器的同时,考虑了加性和乘性扰动。
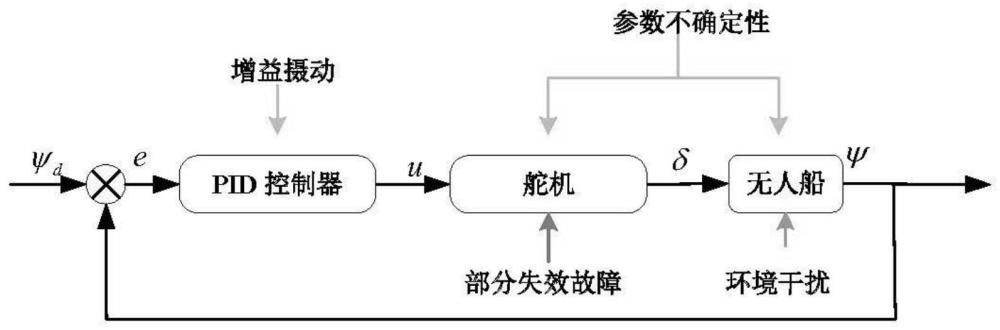
2、步骤(1)设置一个航向保持系统,其中包含pid控制器、舵机、无人船。将期望航向与实际航向所产生的偏差信号输出至pid控制器,产生控制信号为u1,u1与舵机中的转向角控制器产生的控制信号u2一起作用于舵机产生实际舵角δ,使得实际航向与期望航向相符合。
3、步骤(2)根据航向保持系统,建立带有内部参数不确定性的无人船运动数学模型以及无人船运动传递函数。设无人船完全对称,将坐标系原点设置于无人船重心上,无人船运动数学模型为:
4、
5、其中,设为冲击加速度;为影响加速度;为偏航加速度;izz为船沿z轴的惯性;jzz为额外的惯性。m、mx、my分别表示船舶的质量、纵向和横向附加质量。x、y、n表示无人船运动数学模型坐标轴三个方向,下标h表示是作用在船上的力和力矩,下标p和r表示是作用在螺旋桨和转向机上的力和力矩。
6、航向控制时,漂移角很小,可将(1)式线性化为:
7、
8、其中,下标u,υ,r,δ表示线性化后对应方向上的力和力矩,u0为u(t)的线性化表示。
9、式(2)的第一个方程和第二、第三个方程是解耦的。实际操作时,相比于横漂运动,更着重于转首角速度。根据式(2),设δu=us(t)-u0≈0,则舵角δ(s)和艏摇角速度r(s)的传递函数可以被描述为:
10、
11、由于无人船运动具有低频特性,传递函数在低频下可降阶为一阶模型:
12、
13、t为船舶时间常数,t=t1+t2-t3。s为拉普拉斯变换域中的频率。k为系统的增益。式(4)在时域中可表示为:
14、
15、定义当存在参数内部参数不确定性和外部干扰时,(5)式重写如下:
16、
17、ω(t)为扰动角,得到式(6)即为无人船运动传递函数。
18、步骤(3)获取航向保持系统中舵机特性。从控制舵角输出到实际舵角信号有一个无法避免的延迟。通常在大型船舶上,这种方向舵特性可以看作是一阶惯性环节。然而,由于方向舵具有效率高和速度快等特性,一阶惯性环节难以充分描述。结果表明二阶欠阻尼系统能够较好地描述舵机特性,描述如下:
19、
20、其中,ζ是阻尼比,ωn是自然频率,kn是放大倍数,u1(t)是指令舵角,|δ(t)|≤35°,定义te1=2ζωn,在考虑参数不确定性的情况下,二阶欠阻尼系统描述的舵机特性可改写为:
21、
22、步骤(4)根据舵机特性与无人船运动传递函数,构建无人船运动数学模型与控制器故障模型。结合式(6)与式(8)并取状态变量:为基准角度,可得无人船运动数学模型如下:
23、
24、然后,可得:
25、
26、其中:
27、
28、c=[0 -1 0 0 0],
29、δb=[0000b5]t,δd=[00d3 00]t
30、a54=-δte2,a55=-δte1
31、b5=δke,
32、所述构建控制器故障模型具体过程如下:
33、
34、其中,为控制器增益矩阵,e(t)表示状态变量,τ为时间变化量,δk=[δki δkp δkd δkm1 δkm2]为控制器摄动。ρ(t)为部分失效故障,满足:0<ρmin≤ρ(t)≤ρmax≤1,ρmax和ρmin分别表示ρ(t)的上界和下界。它们通常都遵循这样的规则:有很小的概率会发生严重故障,然而有很大的概率会发生轻微故障。基于这种情况,将控制器故障模型重建为:
35、ρ(t)=θ(t)ρ1(t)+(1-θ(t))ρ2(t) (12)
36、其中:
37、
38、是已知的参数。假设θ(t)遵循伯努利分布定律,并且e{θ(t)}=θ′是属于[0,1]的常数。ρ1(t)和ρ2(t)在实践中是未知的。为了降低设计控制器的保守性,给出定义:ρk(t)=ρ′k(1+gk),k=1,2,其中,
39、
40、可以得出以下等式:
41、
42、令可得:
43、
44、其中:δρ=θ′ρ′1g1(t)+(1-θ′)g2(t)。
45、根据式(12)建立的控制器故障模型,则无人船运动数学模型可重写为:
46、
47、其中,e{θ(t)}=θ′是属于[0,1]的常数,
48、步骤(5)给出了一个具有故障分布的非脆弱容错控制器,以确保带有内部参数不确定性的无人船系统均方稳定。首先提出建立控制器的假设与引理,然后进一步证明控制器达到h∞性能要求,并给出两个定理讨论了控制器的增益问题。
49、步骤(5)、构建非脆弱容错控制器,解决无人船系统内部参数不确定性与局部故障的问题,完成无人船系统的控制。
50、步骤(5.1)解决系统内部参数不确定性:
51、对于一些给定的正常数θ′、ρ′1、ρ′2,无人船运动数学模型式(15)是均方稳定的,具有h∞抗干扰水平γ,如果存在正定矩阵p>0、q>0、r>0,对于具有合适维度的矩阵且γ>0、σ0使得以下矩阵不等式成立,解决系统内部参数不确定性问题:
52、
53、其中:
54、
55、
56、
57、
58、
59、
60、
61、γ1=(m1 m1 m1 0 0)t
62、
63、i为单位矩阵,n为任意矩阵,m1、e1、e2、e3为已知常数矩阵;
64、船舶运动过程中,舵机会无法避免地发生局部故障,且局部失效系数δρ是未知的。以下的步骤(6)则聚焦于并解决这样的故障。
65、步骤(5.2)解决局部故障:
66、对于一些给定的正常数θ′、ρ′1、ρ′2,无人船运动数学模型式(15)是均方稳定的,具有h∞抗干扰水平γ,如果存在正定矩阵p>0、q>0、r>0,对于具有合适维度的矩阵且γ>0、σ1、σ2、σ3使得以下矩阵不等式成立,解决局部故障问题:
67、
68、其中:
69、
70、
71、
72、
73、
74、
75、γ2=(θ′ρ′1b θ′ρ′1b θ′ρ′1b 0 0 θ′ρ′1n2)t
76、
77、γ3=(θ″ρ′2b θ″ρ′2b θ″ρ′2b 0 0 θ″ρ′2n2)t
78、
79、n2为任意矩阵。
80、进一步给出两个定理讨论了控制器的增益问题。定理一适用于控制器乘性扰动的情况;定理二适用于控制器加性扰动的情况。
81、本发明有益效果:本发明建立了一个无人船运动数学模型,并将模型纳入控制器的设计中。此外,根据从“青山”号无人船上收集的实际数据,确定了该模型并分析了其可行性;并基于故障扰动的特点,建立了分布相关的随机故障模型。考虑了控制器增益扰动的特性,在控制器的设计中同时考虑了加性和乘性扰动,从而证明了非脆弱容错控制器的优越性:在相同的干扰和故障下,非脆弱容错控制器能够抑制干扰并且比被动鲁棒控制器更好地处理故障。
- 还没有人留言评论。精彩留言会获得点赞!