具有实时函数逼近器的自动驾驶车辆的轨迹规划系统的制作方法
本公开涉及一种轨迹规划系统,该轨迹规划系统基于自动驾驶车辆的一组自我状态的实时近似值来确定自动驾驶车辆的轨迹。
背景技术:
1、半自动驾驶车辆和自动驾驶车辆在道路上变得越来越普遍。自动驾驶车辆可以执行各种规划任务,例如任务规划、行为规划和局部规划。一般来说,任务规划器基于自主车辆的开始位置到结束位置来确定轨迹或路线。当车辆沿着任务规划器确定的规定路线前进时,行为规划器专注于处理移动障碍物和静态物体,同时遵守任何规定的道路规则。
2、行为规划器目前没有利用基于动力学的预测信息来做出关于车辆轨迹的决策。因此,在某些情况下,在极端或意外事件中车辆可能无法完成及时避开移动障碍物的机动动作。极端或意外事件的一些示例包括恶劣天气、致动器不工作时或突然不稳定的驾驶员。传统方法可以使用运动学模型结合最坏情况加速度(worst-case acceleration)来限制车辆之间的车距。然而,运动学模型没有考虑线性和非线性轮胎动力学、较高滑移驾驶条件或车辆的横向状态和纵向状态之间的耦合运动。
3、因此,虽然当前的自动驾驶车辆实现了其预期目的,但是本领域中仍需要一种改进的轨迹规划系统,该轨迹规划系统通过利用更高保真度动力学模型来确保规避机动动作始终存在并且在感兴趣的操作域内是可执行的。
技术实现思路
1、根据几个方面,公开了一种自动驾驶车辆的轨迹规划系统。轨迹规划系统包括与一个或多个外部车辆网络电子通信的一个或多个控制器,一个或多个外部车辆网络收集关于位于自动驾驶车辆周围环境中的一个或多个移动障碍物的数据。一个或多个控制器执行指令以基于自动驾驶车辆动力学模型来确定离散时间相对车辆状态。一个或多个控制器基于离散时间相对车辆状态来确定位置回避集合,位置回避集合表示自动驾驶车辆在执行机动动作的同时绕过一个或多个移动障碍物时所回避的相对横向位置和纵向位置。一个或多个控制器确定自动驾驶车辆在不进入位置回避集合的情况下无法执行机动动作的离线自我状态集合。一个或多个控制器通过函数逼近器实时逼近自动驾驶车辆的实时自我状态集合,其中函数逼近器已经在监督学习过程中用该离线自我状态集合根据地面真值数据集合进行了训练。一个或多个控制器计算自动驾驶车辆的多个相对状态轨迹,其中多个相对状态轨迹避免与自动驾驶车辆的该实时自我状态集合相交。一个或多个控制器从自动驾驶车辆的多个相对状态轨迹中选择轨迹,其中自动驾驶车辆在执行机动动作时遵循该轨迹。
2、在另一个方面,函数逼近器基于自动驾驶车辆和一个或多个移动障碍物的当前位置和当前速度、自动驾驶车辆当前在行驶的道路的速度限制、环境变量和路况实时逼近该实时自我状态集合。
3、在又一个方面,一个或多个控制器通过以下方式选择轨迹:基于一个或多个特性为自动驾驶车辆的每个相对状态轨迹分配分数,并且选择具有最高分数的相对状态轨迹作为轨迹。
4、在一个方面,一个或多个特性包括以下一项或多项:乘坐舒适性、油耗、定时和持续时间。
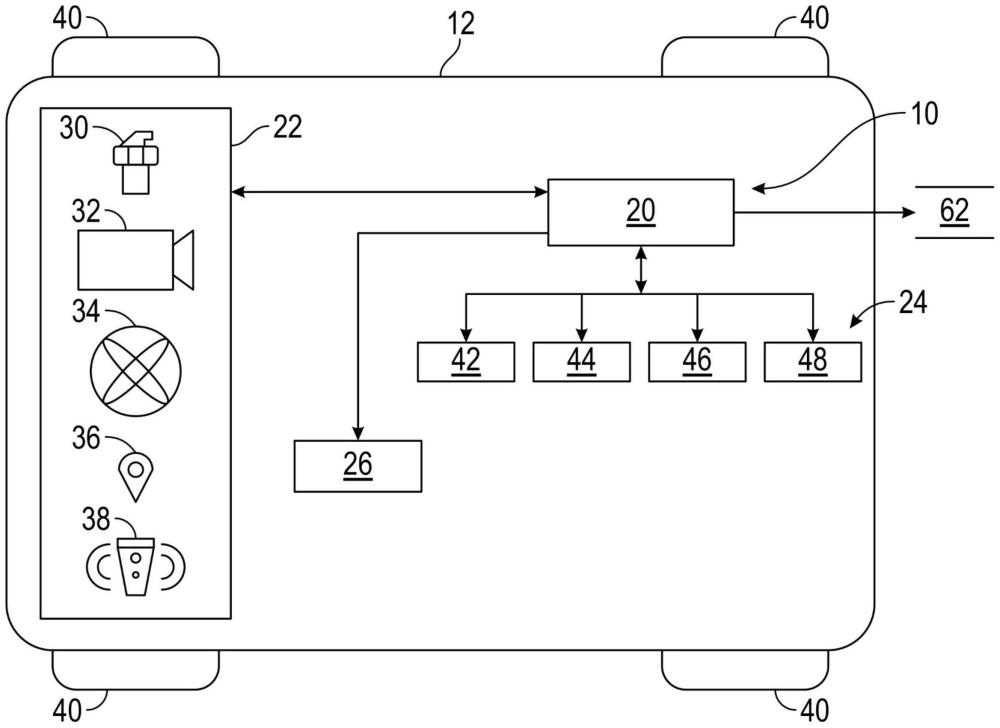
5、在另一个方面,轨迹规划系统包括与一个或多个控制器电子通信的多个传感器,其中一个或多个控制器从多个传感器接收多个动力学变量作为输入。
6、在又一个方面,一个或多个控制器基于多个动力学变量和车辆底盘配置信息来确定自动驾驶车辆的自动驾驶车辆动力学模型。
7、在一个方面,位置回避集合由下式确定:
8、
9、其中是位置回避集合,es是自动驾驶车辆相对于障碍物的离散时间相对纵向状态,ed是自动驾驶车辆相对于障碍物的离散时间相对横向状态,es,l是离散时间相对纵向状态es的下限,es,u是离散时间相对纵向状态es的上限,ed,l是离散时间相对横向状态ed的下限,并且ed,u是位置回避集合的离散时间相对纵向状态es,的下限。
10、在另一个方面,一个或多个控制器基于自动驾驶车辆的初始状态、自动驾驶车辆的最终状态以及一个或多个驾驶攻击性级别来确定自动驾驶车辆的多个相对状态轨迹。
11、在又一个方面,一个或多个驾驶攻击性级别包括保守攻击性级别、适度攻击性级别和侵略攻击性级别。
12、在一个方面,一个或多个控制器在离线过程中基于模拟数据和实验数据中的一者确定该自我状态集合。
13、在另一个方面,一个或多个移动障碍物包括位于自动驾驶车辆正行驶的道路上的另一车辆。
14、在又一个方面,该自我状态集合表示自动驾驶车辆无法在时间范围内执行机动动作以避开一个或多个移动障碍物的车辆状态。
15、在一个方面,自动驾驶车辆动力学模型包括以下一项或多项:线性轮胎模型和非线性轮胎模型。
16、在另一个方面,公开了一种包括轨迹规划系统的自动驾驶车辆。自动驾驶车辆包括确定多个动力学变量的多个传感器、收集关于位于自动驾驶车辆周围环境中的一个或多个移动障碍物的数据的一个或多个外部车辆网络、以及与一个或多个外部车辆网络和多个传感器电子通信的一个或多个控制器。一个或多个控制器执行指令以基于多个动力学变量和车辆底盘配置信息来确定自动驾驶车辆的自动驾驶车辆动力学模型。一个或多个控制器基于自动驾驶车辆动力学模型来确定离散时间相对车辆状态。一个或多个控制器基于离散时间相对车辆状态来确定位置回避集合,位置回避集合表示自动驾驶车辆在执行机动动作的同时绕过一个或多个移动障碍物时所回避的相对横向位置和纵向位置。一个或多个控制器确定自动驾驶车辆在不进入位置回避集合的情况下无法执行机动动作的离线自我状态集合。一个或多个控制器通过函数逼近器实时逼近自动驾驶车辆的实时自我状态集合,其中函数逼近器已经在监督学习过程中用该离线自我状态集合根据地面真值数据集合进行了训练。一个或多个控制器计算自动驾驶车辆的多个相对状态轨迹,其中多个相对状态轨迹避免与自动驾驶车辆的该实时自我状态集合相交。一个或多个控制器从自动驾驶车辆的多个相对状态轨迹中选择轨迹,其中自动驾驶车辆在执行机动动作时遵循该轨迹。
17、在另一个方面,函数逼近器基于自动驾驶车辆和一个或多个移动障碍物的当前位置和当前速度、自动驾驶车辆当前在行驶的道路的速度限制、环境变量和路况实时逼近该实时自我状态集合。
18、在又一个方面,一个或多个控制器通过以下方式选择轨迹:基于一个或多个特性为自动驾驶车辆的每个相对状态轨迹分配分数,以及选择具有最高分数的相对状态轨迹作为轨迹。
19、在一个方面,一个或多个控制器基于自动驾驶车辆的初始状态、自动驾驶车辆的最终状态以及一个或多个驾驶攻击性级别来确定自动驾驶车辆的多个相对状态轨迹。
20、在另一个方面,自动驾驶车辆动力学模型包括以下一项或多项:线性轮胎模型和非线性轮胎模型。
21、在又一个方面,公开了一种用于选择自动驾驶车辆的轨迹的方法。该方法包括由一个或多个控制器基于自动驾驶车辆动力学模型来确定离散时间相对车辆状态,其中一个或多个控制器与一个或多个外部车辆网络电子通信,一个或多个外部车辆网络收集关于位于自动驾驶车辆周围环境中的一个或多个移动障碍物的数据。该方法包括基于离散时间相对车辆状态来确定位置回避集合,位置回避集合表示自动驾驶车辆在执行机动动作的同时绕过一个或多个移动障碍物时所回避的相对横向位置和纵向位置。该方法还包括确定自动驾驶车辆在不进入位置回避集合的情况下无法执行机动动作的离线自我状态集合。该方法还包括通过函数逼近器实时逼近自动驾驶车辆的实时自我状态集合,其中函数逼近器已经在监督学习过程中用该离线自我状态集合根据地面真值数据集合进行了训练。该方法还包括计算自动驾驶车辆的多个相对状态轨迹,其中多个相对状态轨迹避免与自动驾驶车辆的该实时自我状态集合相交。最后,该方法包括从自动驾驶车辆的多个相对状态轨迹中选择轨迹,其中自动驾驶车辆在执行机动动作时遵循该轨迹。
22、在另一个方面,该方法包括基于自动驾驶车辆和一个或多个移动障碍物的当前位置和当前速度、自动驾驶车辆当前在行驶的道路的速度限制、环境变量和路况实时逼近该实时自我状态集合。
23、根据本文提供的描述,进一步的适用领域将变得显而易见。应该理解,说明书和具体示例仅仅是为了说明的目的,而不是旨在限制本公开的范围。
- 还没有人留言评论。精彩留言会获得点赞!