适用于自动驾驶农机的控制方法、装置及电子设备
本发明涉及计算机,尤其涉及一种适用于自动驾驶农机的控制方法、装置及电子设备。
背景技术:
1、自动驾驶农机能够自动完成耕整地、播种、施肥、中耕、喷药、收获和打捆等作业环节,已经成为智能农机的发展方向。自动驾驶农机是在原有农机基础上,通过加装传感器进行信息采集、控制器进行数据处理、执行机构进行操控,实现农机自动作业,提高农机利用率和作业的质量,降低劳动强度。
2、自动驾驶农机操控一般包括横向操控、纵向操控和作业操控3部分。农机横向操控即转向操控,可以使农机按规定的路径行驶,一般通过操控转向轮和履带差速实现。农机纵向操控即农机行进速度控制,通过调节油门、挡位、离合、刹车等操控,实现农机根据工况以及作业装置工作状态操控行进速度。作业操控是指通过操控提升、割台等作业装置实现按需工作。
3、相关技术中,自动驾驶农机作业时,一般是人在驾驶室内,遇到异常工况处理、紧急状况处理一般需要操作人员介入,提高安全性。现在介入多采用以下方式:(1)按键取消自动驾驶;(2)踩刹车进入人工驾驶状态;(3)熄火紧急停车。这三种方式均需要中断作业,响应时间长,恢复自动驾驶状态操作繁琐,导致效率较低。
技术实现思路
1、针对现有技术存在的问题,本发明实施例提供一种适用于自动驾驶农机的控制方法、装置及电子设备。
2、第一方面,本发明提供一种适用于自动驾驶农机的控制方法,包括:
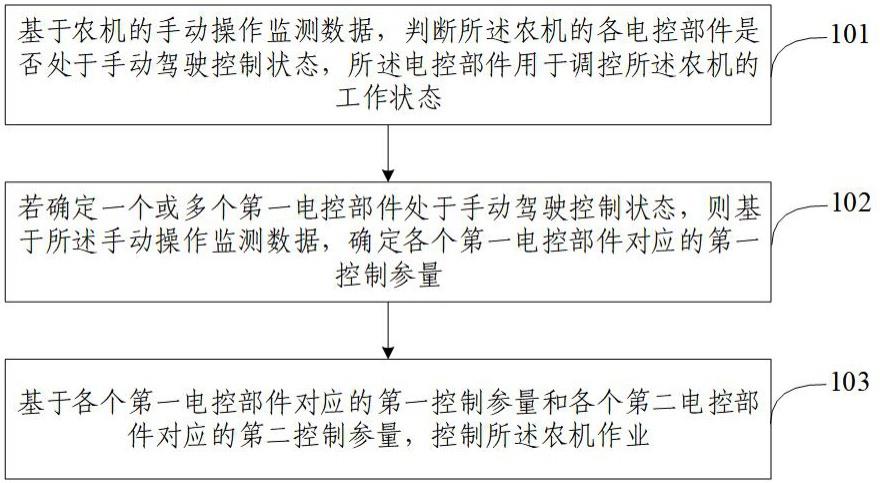
3、基于农机的手动操作监测数据,判断所述农机的各电控部件是否处于手动驾驶控制状态,所述电控部件用于调控所述农机的工作状态;
4、若确定一个或多个第一电控部件处于手动驾驶控制状态,则基于所述手动操作监测数据,确定各个第一电控部件对应的第一控制参量;
5、基于各个第一电控部件对应的第一控制参量和各个第二电控部件对应的第二控制参量,控制所述农机作业;
6、所述第二电控部件为所述农机中处于自动驾驶控制状态的电控部件,所述第二控制参量是基于自动驾驶指令确定的。
7、可选地,根据本发明提供的一种适用于自动驾驶农机的控制方法,所述手动操作监测数据包括:刹车踏板位置监测数据、油门手柄位置监测数据、换向手柄位置监测数据、挡位手柄升降挡监测数据和提升手柄位置监测数据;
8、所述基于农机的手动操作监测数据,判断所述农机的各电控部件是否处于手动驾驶控制状态,包括:
9、基于所述刹车踏板位置监测数据、所述油门手柄位置监测数据、所述换向手柄位置监测数据、所述挡位手柄升降挡监测数据和所述提升手柄位置监测数据,判断所述农机的各电控部件是否处于手动驾驶控制状态。
10、可选地,根据本发明提供的一种适用于自动驾驶农机的控制方法,所述若确定一个或多个第一电控部件处于手动驾驶控制状态,则基于所述手动操作监测数据,确定各个第一电控部件对应的第一控制参量,包括:
11、在刹车踏板处于刹车状态的情况下,确定制动电控部件、油门电控部件、换向电控部件、挡位电控部件和提升电控部件处于手动驾驶控制状态;
12、基于所述刹车踏板位置监测数据,确定所述制动电控部件对应的第一控制参量;
13、设置所述油门电控部件对应的第一控制参量为预设发动机怠速值;
14、设置所述换向电控部件对应的第一控制参量为空挡值;
15、设置所述挡位电控部件对应的第一控制参量为预设挡位初始值;
16、设置所述提升电控部件对应的第一控制参量为提升装置的提升高度实际位置值。
17、可选地,根据本发明提供的一种适用于自动驾驶农机的控制方法,所述若确定一个或多个第一电控部件处于手动驾驶控制状态,则基于所述手动操作监测数据,确定各个第一电控部件对应的第一控制参量,包括:
18、在刹车踏板未处于刹车状态且油门手柄未处于油门最小位置的情况下,确定油门电控部件处于手动驾驶控制状态;
19、基于所述油门手柄位置监测数据,确定所述油门电控部件对应的第一控制参量。
20、可选地,根据本发明提供的一种适用于自动驾驶农机的控制方法,所述若确定一个或多个第一电控部件处于手动驾驶控制状态,则基于所述手动操作监测数据,确定各个第一电控部件对应的第一控制参量,包括:
21、在刹车踏板未处于刹车状态且换向手柄未处于空挡位置的情况下,确定换向电控部件处于手动驾驶控制状态;
22、基于所述换向手柄位置监测数据,确定所述换向电控部件对应的第一控制参量。
23、可选地,根据本发明提供的一种适用于自动驾驶农机的控制方法,所述若确定一个或多个第一电控部件处于手动驾驶控制状态,则基于所述手动操作监测数据,确定各个第一电控部件对应的第一控制参量,包括:
24、在刹车踏板未处于刹车状态且挡位手柄发生状态变化的情况下,确定挡位电控部件处于手动驾驶控制状态;
25、基于所述挡位手柄升降挡监测数据,确定所述挡位电控部件对应的第一控制参量。
26、可选地,根据本发明提供的一种适用于自动驾驶农机的控制方法,所述若确定一个或多个第一电控部件处于手动驾驶控制状态,则基于所述手动操作监测数据,确定各个第一电控部件对应的第一控制参量,包括:
27、在刹车踏板未处于刹车状态且提升手柄未处于停止位置的情况下,确定提升电控部件处于手动驾驶控制状态;
28、在所述提升手柄处于上升位置的情况下,确定所述提升电控部件对应的第一控制参量为预设提升高度最大值;
29、或,在所述提升手柄处于下降位置的情况下,确定所述提升电控部件对应的第一控制参量为预设提升高度最小值。
30、第二方面,本发明还提供一种适用于自动驾驶农机的控制装置,包括:
31、判断模块,用于基于农机的手动操作监测数据,判断所述农机的各电控部件是否处于手动驾驶控制状态,所述电控部件用于调控所述农机的工作状态;
32、确定模块,用于若确定一个或多个第一电控部件处于手动驾驶控制状态,则基于所述手动操作监测数据,确定各个第一电控部件对应的第一控制参量;
33、控制模块,用于基于各个第一电控部件对应的第一控制参量和各个第二电控部件对应的第二控制参量,控制所述农机作业;
34、所述第二电控部件为所述农机中处于自动驾驶控制状态的电控部件,所述第二控制参量是基于自动驾驶指令确定的。
35、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述适用于自动驾驶农机的控制方法。
36、第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述适用于自动驾驶农机的控制方法。
37、本发明提供的适用于自动驾驶农机的控制方法、装置及电子设备,通过对农机的手动操作事件进行监测,可以获取农机的手动操作监测数据,进而可以基于监测数据判断农机的各电控部件是否处于手动驾驶控制状态,若确定一个或多个第一电控部件处于手动驾驶控制状态,则可以基于监测数据,确定各个第一电控部件对应的第一控制参量,也即手动驾驶控制的优先级高于自动驾驶控制,对于处于自动驾驶控制状态的第二电控部件,可以获取第二电控部件对应的第二控制参量,进而可以输入各个第一电控部件对应的第一控制参量和各个第二电控部件对应的第二控制参量至对应的电控部件,通过农机的各电控部件调控农机的工作状态,实现按照手动优先操控方式控制农机作业,避免人员介入的情况下中断作业,能够缩短响应时长,提升作业效率。
- 还没有人留言评论。精彩留言会获得点赞!