水产养殖水空两栖无人机自主巡航与自主水空过渡方法
本发明涉及无人机领域,尤其涉及一种水产养殖水空两栖无人机自主巡航与自主水空过度方法。
背景技术:
1、现如今无人机的研究受到了各界的关注,并且随着无人机自主与智能技术的提出,其在军事和民用扮演的角色越来越重要。在水产养殖中无人机已经扮演了很重要的角色,并且两栖无人机的提出使得无人机在水产养殖中的作用不再局限于定点投放和消毒等工作,还可以进入水中进行水源环境检测的工作,这也促使针对水空两栖自主无人机技术的研究。
2、目前水空两栖无人机的自主安全跨越正在进一步研究,对于水空两栖无人机的自主水空过渡需要保证无人机自身安全和周围环境安全。现有的无人机器的路径规划大多是在某一特定区域,比如在空中或者在水中,较少涉及到水路两栖自主交换并进行不同领域的路径规划。
技术实现思路
1、为了解决上述技术问题,本发明的目的是提供一种水产养殖水空两栖无人机自主巡航与自主水空过度方法,能够实现空中水中自主切换并快速进行路径规划,完成巡航任务。
2、本发明所采用的第一技术方案是:一种水产养殖水空两栖无人机自主巡航与自主水空过渡方法,包括以下步骤:
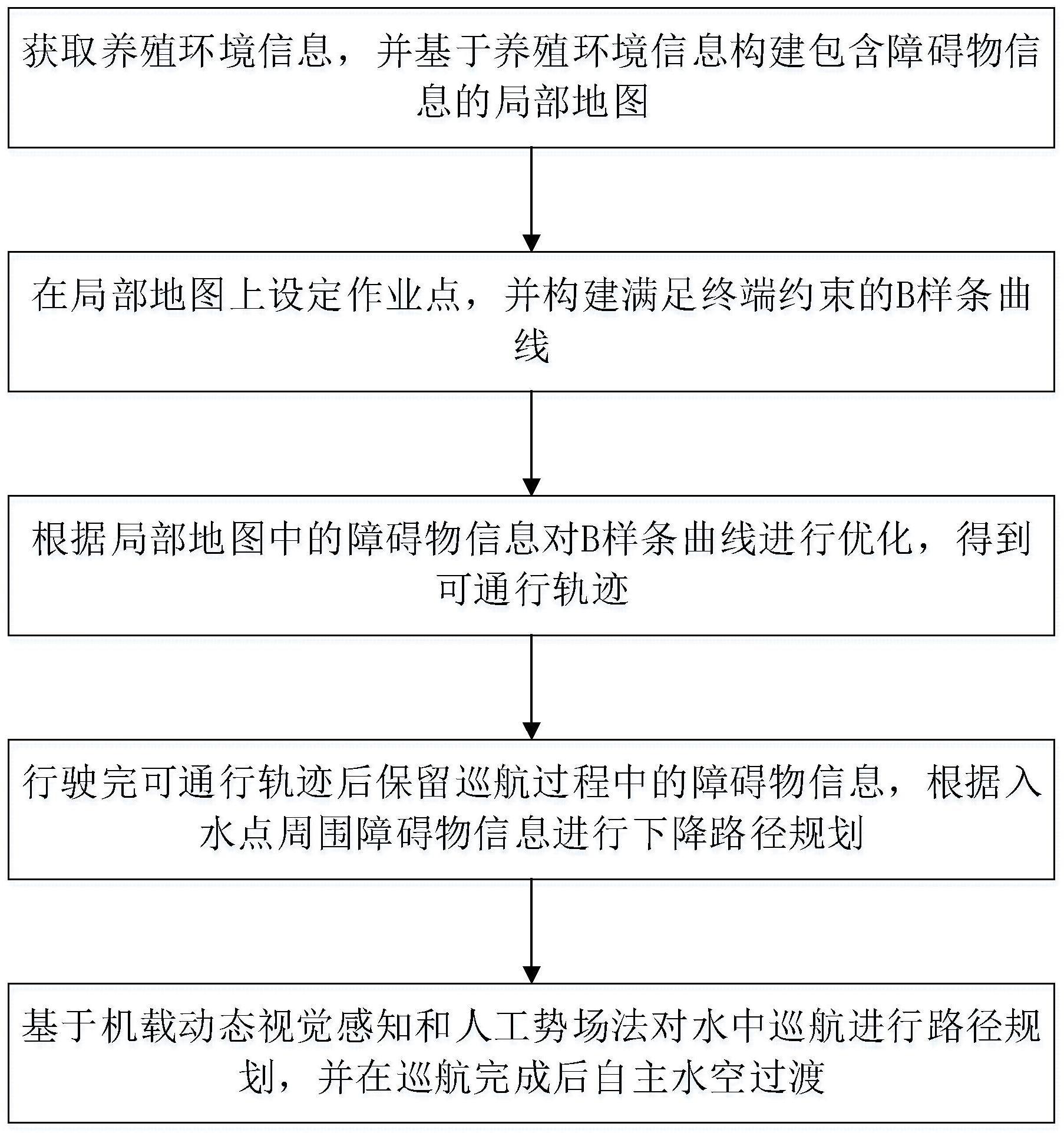
3、获取养殖环境信息,并基于养殖环境信息构建包含障碍物信息的局部地图;
4、在局部地图上设定作业点,并构建满足终端约束的b样条曲线;
5、根据局部地图中的障碍物信息对b样条曲线进行优化,得到可通行轨迹;
6、行驶完可通行轨迹后保留巡航过程中的障碍物信息,根据入水点周围障碍物信息进行下降路径规划;
7、基于机载动态视觉感知和人工势场法对水中巡航进行路径规划,并在巡航完成后自主水空过渡。
8、在本技术方案中,当无人机在空中巡航时,根据相机拍摄的局部图像构建局部地图,避免了大量数据的搜集和复杂模型的建立,根据局部地图进行路径规划,并根据新出现的障碍物利用adam算法进行优化,得到安全可靠的飞行路径;在需要下水时,根据入水点周围障碍物环境生成下降路线;在水中,结合机载动态视觉感知和人工势场法对水中巡航路径进行规划,并根据需要自主返回空中,实现了无人机自主水空两栖巡航和环境切换。
9、进一步,所述障碍物信息包括飞行过程中遇到的障碍物的位置坐标及生成的满足安全阈值的障碍物膨胀体信息。
10、进一步,所述作业点是指设定的目标点和根据vins和gps信息确定的起始点。
11、进一步,所述根据局部地图中的障碍物信息对b样条曲线进行优化,得到可通行轨迹这一步骤,具体包括:
12、设定碰撞阈值,并依据碰撞阈值增大障碍物膨胀体的体积;
13、获取将与障碍物发产生碰撞的b样条曲线上的危险控制点,并获取与危险控制点对应的障碍物表面点;
14、基于危险控制点与障碍物表面点构建排斥向量,并根据排斥向量将危险控制点远离障碍物,得到避开障碍物的b样条曲线;
15、利用b样条曲线的凸包性质调整避开障碍物的b样条曲线上的控制点,得到光滑通行轨迹;
16、根据新发现的障碍物信息,利用adam算法对光滑通行轨迹进行优化,得到可通行轨迹。
17、进一步,所述行驶完可通行轨迹后保留巡航过程中的障碍物信息,根据入水点周围障碍物信息进行下降路径规划这一步骤,其具体包括:
18、无人机行驶完可通行轨迹后,保存其经过的障碍物的位置坐标及障碍物膨胀体的大小;
19、根据作业要求选定的入水点周围的障碍物的位置坐标及障碍物膨胀体的大小进行路径规划。
20、进一步,所述根据作业要求选定的入水点周围的障碍物的位置坐标及障碍物膨胀体的大小进行路径规划这一步骤,其具体包括:
21、若入水点周围没有障碍物,则选择竖直下降入水;
22、若入水点周围有障碍物,则获取障碍物的位置坐标及障碍物膨胀体沿着无人机竖直降落所在面的轮廓;
23、等额选取轮廓上的点,得到轮廓点集合;
24、从轮廓点集合中选取轮廓目标点,所述轮廓目标点与无人机坐标的连线垂直于轮廓目标点的切平面;
25、构建从轮廓目标点指向无人机的排斥向量,依据排斥向量得到水平方向上的排斥速度;
26、根据无人机与障碍物膨胀体之间的距离与安全距离阈值之间的关系,利用模糊集算法对排斥速度进行调整,得到满足安全距离阈值的水平速度;
27、根据满足安全距离阈值的水平速度和竖直下降速度,生成无人机安全入水路径。
28、进一步,所述基于机载动态视觉感知和人工势场法对水中巡航进行路径规划,并在巡航完成后自主水空过渡这一步骤,具体包括:
29、获取水下环境深度图,并根据水下环境深度图构建点云数据,所述点云数据包括水下渔网位置信息;
30、利用dbscan聚类对点云数据进行聚类,并利用机载动态视觉对聚类后的点云数据进行分类,得到不同类别的动态对象;
31、根据不同类别的动态对象实时更新障碍物的坐标位置,并结合人工势场法对水下路径进行规划及自主水空过渡。
32、进一步,所述人工势场法中的引力场函数及引力的表达式为,
33、引力场函数:
34、
35、其中,uatt(x)表示引力场函数,katt表示引力场系数,xu无人机坐标位置,xg目标点坐标位置,ρ(xu,xg)表示无人机当前位置到目标点的距离;
36、引力为引力场函数的负导数,表达式为:
37、
38、其中,fa表示引力。
39、进一步,所述人工势场法中的斥力场函数和斥力的具体表达式为,
40、斥力场函数:
41、
42、其中,krep为斥力场系数,xu为无人机坐标位置,xo为障碍物坐标位置,ρ(xu,xo)表示无人机到障碍物的距离,ρo为无人机到障碍物的安全距离阈值;
43、斥力为斥力场函数的负导数,具体表达式为:
44、
45、其中,fr表示斥力。
46、进一步,所述人工势场法中的人工加入的向上势场函数和向上引力的表达式分别为:
47、
48、fup(x)=cos(π-ω)fr(x)+ηkup·ρup
49、其中,uup(x)表示向上势场函数,fup(x)表示向上引力,kup表示向上势场函数系数,ρup表示无人机当前位置据水面的竖直距离,η表示权重系数,ω表示fr(x)与大地坐标系z轴负方向的夹角,ur(x)表示总人工势场函数,fr(x)表示总和力。
50、本发明提供的一种水产养殖水空两栖无人机自主巡航与自主水空过渡方法的有益效果是:本发明基于养殖场局部环境构建局部地图,节省了构建模型所用的时间,在局部地图中构建样条曲线,得到无人机飞行初始路径,再根据b样条曲线的自身的凸包性质对初始路径进行优化,绕过障碍物得到光滑路径;对于新出现的障碍物,利用adam算法进行轨迹优化,得到安全可靠的飞行路径,整个路径规过程简单快捷,不需要大量的环境数据支撑,也不需要复杂的模型;需要下水检测时,根据入水点及其周围的障碍物信息规划安全下降路线;在入水之后,结合机载视觉动态分类和人工势场法对水下巡航规划路径,并根据需要随时返回空中,实现了无人机自主水空两栖自由变换和路径规划。
- 还没有人留言评论。精彩留言会获得点赞!