一种基于图像识别的蒜黄种植控制系统及方法
本技术涉及农业自动化控制,具体涉及一种基于图像识别的蒜黄种植控制系统及方法。
背景技术:
1、蒜黄是利用大蒜鳞茎在黑暗和适当的温﹑湿度条件下栽培而成的,在我国各地均有种植,是人们喜食的绿色蔬菜。目前,蒜黄大多采用在大棚里进行生产的方式,成片密集种植,对于蒜黄的种植与收割,多依靠于人工完成,因受种植场地尺寸、光线及收割设备的影响,工作环境差、劳动强度大、种植收割效率低。
2、发展垂直蒜黄种植可以运用多层植被种植可以使实现了资源与空间的充分利用,可以解决目前农业发展面临的人口压力、耕地减少及资源匮乏等问题,具有占地少、产量高和品质高等优势。中国专利cn214987863u公开了一种植物种植用的立体库,包括货架、行走轨道和堆垛机,当堆垛机移动种植板时,支撑架上的种植板同时后退或前进,便于放置下一种植板和将后方的种植板取出,并且通过堆垛机替代人工作业,提升了工作效率。中国专利cn210365426u公开了一种适用于植物种植的立体库,包括仓库本体以及设置在仓库本体内的滚筒传输线、行走轨道、堆垛机和植物货架整个立体库流水化作业,减少人工投入,提升工作效率。
3、上述两种立体化的种植结构都可以用于蒜黄的种植,都可以实现单位面积产量最大化,但是如何实现蒜黄立体大面积的种植的自动一体化种、管、收成为本领域亟待解决的技术问题。
技术实现思路
1、本技术为了解决上述技术问题,提出了如下技术方案:
2、第一方面, 本技术实施例提供了一种基于图像识别的蒜黄种植控制系统,包括:蒜黄立体种植库,所述蒜黄立体种植库设置有运输流水线,所述运输流水线两端分别为所述蒜黄立体种植库的入库口和出库口,所述入库口与回转流水线的第一端相连接,所述出库口与输出流水线的第一端相连接,所述输出流水线的第二端与蒜黄收割机输入端相连接,所述回转流水线的第二端设置在所述蒜黄收割机的种植箱输出口处;所述蒜黄收割机的蒜黄输出口处设置蒜黄传送带,所述蒜黄传送带的设置方向与输出的蒜黄纵向平行设置;
3、所述蒜黄立体种植库、运输流水线、回转流水线和输出流水线均设置有图像识别装置,所述图像识别装置用于根据获取的图像对蒜黄生长状态、所述种植箱的姿态和标识信息进行识别,智能工厂控制器根据所述图像识别装置识别的结果完成对种植箱在不同阶段的控制,其中不同所述种植箱的标识信息不同。
4、在一种可能的实现方式中,所述蒜黄立体种植库包括立体库支架,所述立体库支架上设置培植水箱,所述培植水箱上设置所述种植箱;
5、所述立体库支架上设置的图像识别装置用于对蒜黄的长势进行监测,如果所述图像识别装置根据图像比对确定蒜黄出现生长迟缓或萎蔫则控制补水装置对培植水箱进行补充水分;当蒜黄的高度达到预设收割高度,则将种植箱放置于输出流水线,控制输出流水线作业将所述种植箱送入到蒜黄收割机,然后控制蒜黄收割机对蒜黄进行收割;收割过程中,如果种植箱在输出流水线上无法正常运输,则对所述种植箱的姿态进行调整。
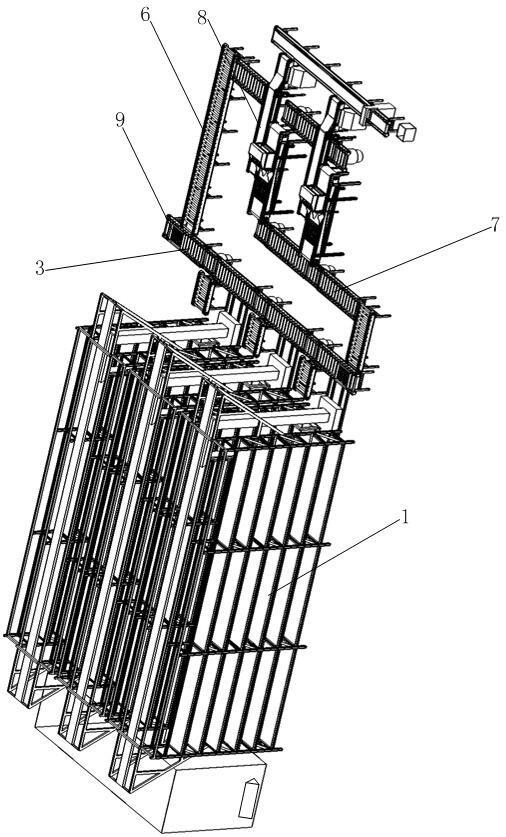
6、在一种可能的实现方式中,所述蒜黄立体种植库还包括轨道固定架,分别固定在轨道固定架两端的地上轨道和天轨,所述地上轨道和天轨均设置在所述立体库支架之间;每个所述地上轨道均设置有种植箱中转站,所述种植箱中转站设置有种植箱中转站流水线,种植箱中转站流水线的第一端与立体库支架相邻设置,种植箱中转站流水线的第二端相邻设置;双指式堆垛机滑动安装于所述地上轨道与天轨上,所述双指式堆垛机上安装有双指式货叉用于插取所述种植箱,所述双指式堆垛机将插取的种植箱放置于种植箱中转站流水线的第一端,然后通过种植箱中转站流水线传输到运输流水线,种植箱通过运输流水线向输出流水线运输,当种植箱到达运输流水线与输出流水线交界处时,设置在运输流水线端部的推杆将种植箱推送到输出流水线。
7、在一种可能的实现方式中,所述立体库支架一侧设置有循环水箱,所述循环水箱通过设置在所述培植水箱上的橡胶接头相连通,相邻所述培植水箱通过所述橡胶接头相连通;
8、所述循环水箱包括清水循环水箱和营养液循环水箱,当蒜黄首次种植时,控制所述清水循环水箱为所述培植水箱供水;当第一种植箱在所述回转流水线上第一次经过时,图像识别装置确定所述第一种植箱的标识信息,所述第一种植箱内的蒜种进入二茬种植,控制营养液循环水箱为所述第一种植箱所对应的培植水箱供水,所述第一种植箱与第一次种植蒜黄的种植箱放置在不同立体库支架或同一立体库支架不同层。
9、在一种可能的实现方式中,所述运输流水线和所述输出流水线上设置有多个顶升旋转装置,每个所述顶升旋转装置均对应设置有图像识别装置;
10、当所述种植箱从种植箱中转站流水线输送至输出流水线上后的第一姿态无法在所述输出流水线上运输,控制器控制所述顶升旋转装置将所述种植箱从第一姿态调整为第二姿态,所述第一姿态为所述种植箱从种植箱中转站流水线输送至输出流水线上初始姿态,所述第二姿态为所述种植箱在所述运输流水线和所述输出流水线上实现运输的姿态,所述种植箱从所述第一姿态转变为第二姿态旋转90度。
11、在一种可能的实现方式中,所述运输流水线上的顶升旋转装置相邻设置在所述种植箱中转站一端,所述输出流水线上的顶升旋转装置相邻设置在蒜黄收割装置一端。
12、在一种可能的实现方式中,所述蒜黄收割装置包括种植箱传送带,所述顶升旋转装置与所述种植箱传送带的第一端相邻设置,所述种植箱传送带上设置蒜黄收割机,所述蒜黄收割机的入口设置在靠近种植箱传送带的第一端的一侧,所述蒜黄收割机的种植箱出口设置在靠近种植箱传送带的第二端的一侧,所述种植箱出口与所述回转流水线的起始端相邻设置,所述蒜黄收割机的中间位置的一侧开设有蒜黄出口,相邻所述蒜黄出口设置有蒜黄传送带;
13、控制种植箱从所述蒜黄收割机的入口进入,收割的蒜黄从所述蒜黄出口输送至所述蒜黄传送带上,收割蒜黄后的种植箱从种植箱出口输送到所述回转流水线进行二茬种植;所述蒜黄出口和种植箱出口均设置有图像识别装置,蒜黄出口的图像识别装置获取蒜黄传送带上的蒜黄图形,确定蒜黄的茎秆与蒜黄传送带的传送方向轴线是否存在预设夹角,如果所述蒜黄的茎秆与蒜黄传送带的传送方向轴线的夹角大于所述预设夹角,则通过人工干预对蒜黄进行梳理;种植箱出口的图像识别装置用于确定输送出来的种植箱,所述回转流水线对应所述种植箱出口处设置顶升旋转装置,当所述图像识别装置从拍摄的图像中提取到种植箱特征信息,则所述种植箱从所述种植箱出口输出,控制顶升旋转装置升起接收种植箱,所述顶升旋转装置接收收割完蒜黄的种植箱后然后下降,种植箱进入到所述回转流水线。
14、在一种可能的实现方式中,所述蒜黄传送带的输出端为蒜黄称重装置,所述蒜黄称重装置包括感应称重式输送机和控制平台,所述控制平台设置称重质量,当所述感应称重式输送机上蒜黄达到设定质量,所述感应称重式输送机开始运转将蒜黄传输至蒜黄打捆装置。
15、在一种可能的实现方式中,所述蒜黄打捆装置由窄皮带蒜黄输送机和打捆机组成,所述窄皮带蒜黄输送机两侧实现蒜黄的初步聚拢,所述窄皮带蒜黄输送机运转将蒜黄运输至打捆机下,打捆机完成蒜黄的打捆并将蒜黄输送至蒜黄收集箱中。
16、第二方面,本技术实施例提供了一种基于图像识别的蒜黄种植控制方法,利用第一方面任一可能实现方式所述的基于图像识别的蒜黄种植控制系统,所述方法包括:
17、利用机械臂将蒜种摆放至种植箱,将所述种植箱通过入库口放置到运输流水线,运输流水线用于将所述种植箱运输到顶升旋转装置处;
18、所述顶升旋转装置控制种植箱变向,通过图像识别装置确定出种植箱变向到位后停止转动并送至种植箱中转站;
19、双指式堆垛机控制双指式货叉将放置于种植箱中转站的种植箱摆放至立体库支架上;
20、控制清水循环水箱为培植水箱供水,同时智能控制系统设定浸泡时间,达到固定时间,智能控制系统控制阀门打开,水流回至循环水箱内,其中每天固定时间为培植水箱供水;
21、蒜黄培植过程中,通过设置在立体库支架上的图像识别装置监测蒜黄的生长情况,并且在培育过程中实时去除瑕疵品;
22、当所述图像识别装置监测到蒜黄达到收割条件时,控制双指式堆垛机通过双指式货叉将待收割的蒜黄连同种植箱一同放置到种植箱中转站,然后运输至运输流水线的顶升旋转装置处实现种植箱的变向;
23、变向处理后的种植箱由出库口通过输出流水线运输至蒜黄收割装置处,同样在图像识别装置的控制下完成二次变向输送到种植箱传送带完成蒜黄的收割;
24、收割完成后蒜黄通过蒜黄出口输送至蒜黄传送带上,蒜黄出口的图像识别装置实时检测输出的蒜黄是否与蒜黄传送带纵向平行,通过蒜黄传送带将收割的蒜黄称重打捆;
25、收割蒜黄后的种植箱从种植箱出口输出,种植出口的图像识别装置确定输送出来的种植箱,当种植箱从种植箱出口输出时,控制顶升旋转装置升起接收种植箱输送到回转流水线;
26、设置在回转流水线上的图像识别装置识别到进入回转流水线的种植箱标识,判断种植箱的回转次数;
27、如果判断种植箱是第一次进入到回转流水线,则通过回转流水线将种植箱输送至入库口进行二茬种植,其中第一次种植的蒜黄和二茬种植的蒜黄放置在不同立体库支架或同一立体库支架不同层,控制营养液循环水箱为二茬种植的种植箱所在的培植水箱进行供水;
28、或者,如果判断进入到回转流水线的培植箱为第二次,则将所述种植箱移走,更换新的蒜种
29、在本技术实施例中,蒜黄的整个培育阶段流水线化,而且通过图像识别装置在整个过程中对蒜黄及种植箱进行监控,收割蒜黄后的种植箱还可以进入到二茬种植,整个过程结合图像识别实现了蒜黄的自动化智能生产,提高了蒜黄种植水平。
- 还没有人留言评论。精彩留言会获得点赞!