四足机器人的状态修正方法、装置、电子设备及存储介质与流程
本发明涉及机器人状态修正,尤其涉及一种四足机器人的状态修正方法、装置、电子设备及存储介质。
背景技术:
1、mpc(model predictive control,模型预测控制)作为控制领域的一类特殊控制,其工作原理为当前控制动作是在每一个采样瞬间通过求解一个有限时域开环最优控制问题而获得,mpc控制过程的当前状态作为最优控制问题的初始状态,解得的最优控制序列只实施第一个控制作用。同时,随着人工智能的迅速发展,机器人逐渐成为相关领域的研究热点,各大研究机构、企业也已研发制造出形态各异的机器人,以当前较为热门的四足机器人为例,四足机器人属于浮动基机器人,即基座可以自由移动的机器人,换言之,可以将四足机器人视为在世界坐标系下单刚体动力学模型。
2、目前,对于四足机器人的运动控制,主要通过控制器对四足机器人进行控制使其执行踏步、转弯、爬坡和越障等任务,具体地,主要使用mpc控制器求解四足机器人的足底反力期待值,以实现四足机器人下一步运动的预测与控制。在对四足机器人的运动控制过程中,为保持运动状态处于正常且较为精确水平,通常需要根据实际路况或者自身运动状态对四足机器人的机械足进行状态修正,当前相关技术中,主要采用按照冗余特性进行控制任务排序,并基于控制任务顺序对四足机器人的足底反力期待值进行修正的方式,确保四足机器人的平稳运行,虽然采用该方式可以在一定程度上对四足机器人进行平稳控制,但在利用机器人本身的外部传感器进行主动式避障碍时,反馈的误差信息并不能及时被控制系统接收,特别是当机器人传感器无法将反馈信号传输至控制端时,采用当前的状态修正方法无法继续工作,即现有的状态修正方法对外部反馈信号比自身所接收的反馈信号的依赖相对更大。
技术实现思路
1、本发明提供了一种四足机器人的状态修正方法、装置、电子设备及存储介质,用于解决或部分解决现有四足机器人状态修正方法中存在的对外部反馈信号比自身所接收的反馈信号的依赖相对更大的技术问题。
2、本发明提供的一种四足机器人的状态修正方法,所述方法包括:
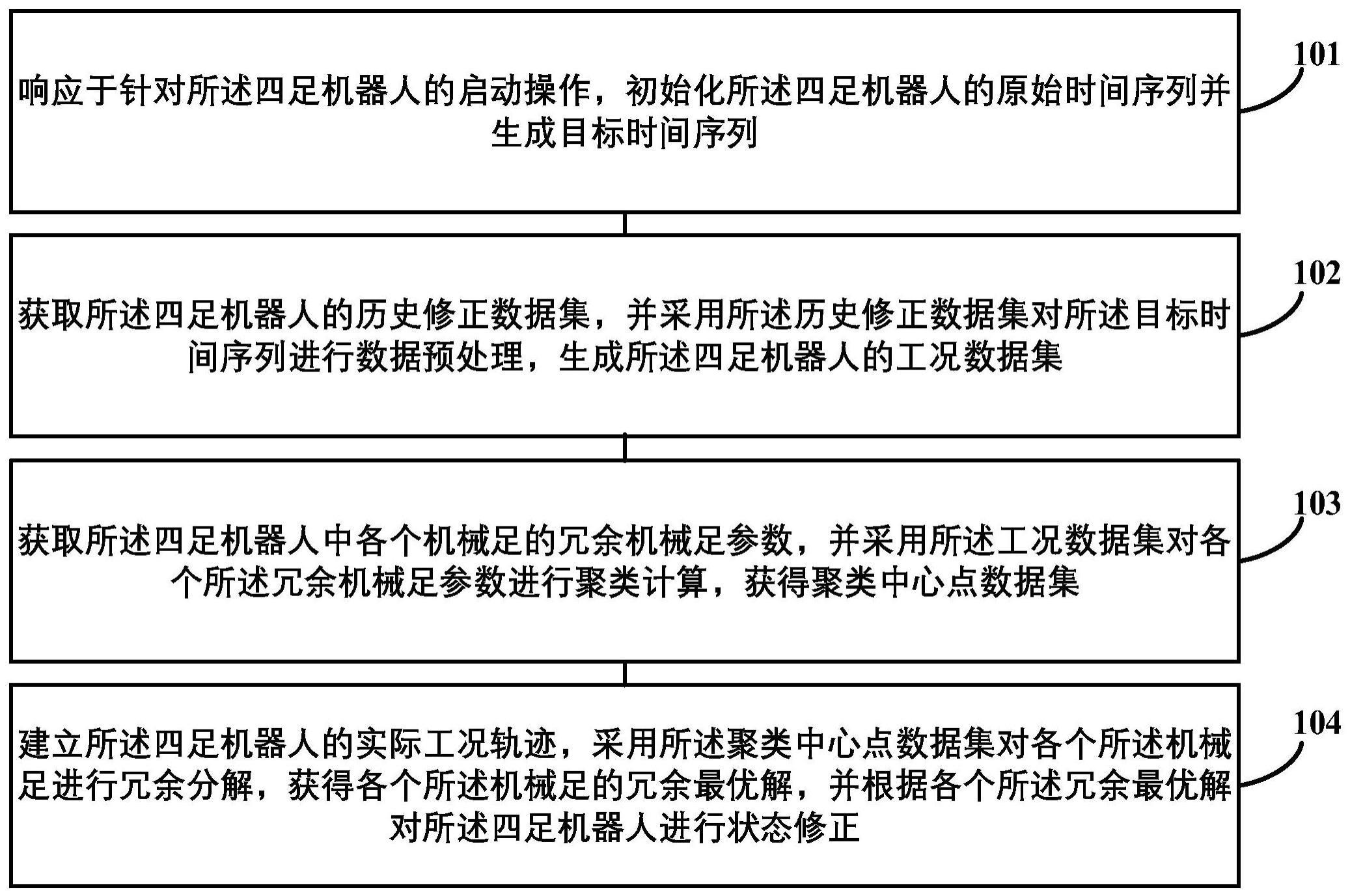
3、响应于针对所述四足机器人的启动操作,初始化所述四足机器人的原始时间序列并生成目标时间序列;
4、获取所述四足机器人的历史修正数据集,并采用所述历史修正数据集对所述目标时间序列进行数据预处理,生成所述四足机器人的工况数据集;
5、获取所述四足机器人中各个机械足的冗余机械足参数,并采用所述工况数据集对各个所述冗余机械足参数进行聚类计算,获得聚类中心点数据集;
6、建立所述四足机器人的实际工况轨迹,采用所述聚类中心点数据集对各个所述机械足进行冗余分解,获得各个所述机械足的冗余最优解,并根据各个所述冗余最优解对所述四足机器人进行状态修正。
7、可选地,所述采用所述历史修正数据集对所述目标时间序列进行数据预处理,生成所述四足机器人的工况数据集,包括:
8、采用所述历史修正数据集对所述目标时间序列进行数据预处理,获得对应的预处理修正数据集;
9、对所述预处理修正数据集进行整合、划分以及归类,获得所述四足机器人的工作状况、平衡控制状况以及轨迹规划所对应的工况过程数据集,接着对所述工况过程数据集进行香农采样,获得所述四足机器人的工况数据集。
10、可选地,所述建立所述四足机器人的实际工况轨迹,采用所述聚类中心点数据集对各个所述机械足进行冗余分解,获得各个所述机械足的冗余最优解,包括:
11、建立所述四足机器人的实际工况轨迹,获取针对所述四足机器人进行轨迹规划的轨迹规划指令;
12、从所述聚类中心点数据集中提取所述机械足中冗余机械臂的关节角度以及关节角速度;
13、根据所述轨迹规划指令、所述关节角度以及所述关节角速度计算所述机械足的雅可比矩阵,并计算所述雅可比矩阵对应的目标函数,生成所述机械足的冗余分解输出;
14、对所述冗余分解输出进行奇异判断,并基于所述奇异判断结果确定所述机械足的冗余最优解。
15、可选地,所述根据所述轨迹规划指令、所述关节角度以及所述关节角速度计算所述机械足的雅可比矩阵,并计算所述雅可比矩阵对应的目标函数,生成所述机械足的冗余分解输出,包括:
16、对所述轨迹规划指令进行冗余分解,获得所述机械足的操作任务指令以及扩充任务指令,所述操作任务指令对应操作任务,所述扩充任务指令对应扩充任务;
17、根据所述操作任务、所述扩充任务、所述关节角度以及所述关节角速度计算所述机械足的雅可比矩阵,计算公式如下:
18、
19、计算所述雅可比矩阵对应的目标函数,计算公式如下:
20、
21、根据所述雅可比矩阵以及所述目标函数,生成所述机械足的冗余分解输出,计算公式如下:
22、
23、其中,q为冗余机械臂的关节角度,为关节角速度,xe为操作任务,xc为扩充任务,f(*)与g(*)均为运动学函数,x表示进行冗余分解前的轨迹规划任务,je(q)为操作任务xe的输入雅可比矩阵,jc(q)为扩充任务xc的输入雅可比矩阵,j表示轨迹规划任务x的雅可比矩阵,表示对轨迹规划任务雅可比矩阵j进行计算,表示操作任务xe对应的自运动,we表示操作任务xe对应的权重系数,表示扩充任务xc对应的自运动,wc表示扩充任务xc对应的权重系数,wv表示关节角速度对应的权重系数,l为轨迹规划任务x的目标控制函数,je为操作任务xe对应的输出雅可比矩阵,jc为扩充任务xc对应的输出雅可比矩阵,为进行雅可比矩阵计算后得出的操作任务xe对应的逆解,为进行雅可比矩阵计算后得出的扩充任务xc对应的逆解,表示机械足的冗余分解输出,*t表示矩阵转置。
24、可选地,所述方法还包括:
25、根据所述目标函数建立所述四足机器人的修正状态模型;
26、根据所述修正状态模型对所述四足机器人的机械足进行关节角度优化计算,获得所述机械足的关节角度优化指标;
27、基于所述关节角度优化指标对所述机械足的活动角度的精确度进行优化;
28、其中,所述机械足的关节角速度为:
29、
30、计算所述机械足的关节角度冗余度,计算公式如下:
31、
32、其中,为机械足的关节角度冗余度,q为固定常数,i为jtj对应的单位矩阵,为梯度算子,s为优化指标;
33、计算所述机械足的关节角度优化指标,计算公式如下:
34、
35、其中,s(w)为关节角度优化指标,i为机械足的关节维数,wi为关节维数i对应的关节角度冗余度,为关节维数i对应的最小关节角度冗余度,为关节维数i对应的最大关节角度冗余度。
36、可选地,所述对所述冗余分解输出进行奇异判断,并基于所述奇异判断结果确定所述机械足的冗余最优解,包括:
37、对所述冗余分解输出进行奇异值分解,获得对应的冗余分解奇异值;
38、设定所述机械足的关节极限,结合所述关节极限以及所述冗余分解奇异值,通过阻尼最小平方法中参数的选择完成所述机械足的冗余机械臂关节限位、避障规划,生成最优解任务,并确定所述最优解任务对应的冗余最优解。
39、可选地,所述四足机器人内置一单片机,所述单片机内至少包含模型预测控制模块以及状态修正存储器,其中,所述模型预测控制模块用于对所述四足机器人进行mpc修正操作,所述状态修正存储器用于当针对所述四足机器人进行mpc修正操作时收集所述mpc修正操作对应的修正数据,并将多组修正数据存储为所述四足机器人的历史修正数据集,所述方法还包括:
40、若所述四足机器人执行重复操作任务,且所述模型预测控制模块无法接收到所述四足机器人的任务反馈信号,则从所述状态修正存储器中提取所述历史修正数据集,并将所述历史修正数据集输入至所述模型预测控制模块的反馈端,以供所述四足机器人完成回收任务。
41、本发明还提供了一种四足机器人的状态修正装置,包括:
42、目标时间序列生成模块,用于响应于针对所述四足机器人的启动操作,初始化所述四足机器人的原始时间序列并生成目标时间序列;
43、工况数据集生成模块,用于获取所述四足机器人的历史修正数据集,并采用所述历史修正数据集对所述目标时间序列进行数据预处理,生成所述四足机器人的工况数据集;
44、聚类中心点数据集生成模块,用于获取所述四足机器人中各个机械足的冗余机械足参数,并采用所述工况数据集对各个所述冗余机械足参数进行聚类计算,获得聚类中心点数据集;
45、机械足冗余分解模块,用于建立所述四足机器人的实际工况轨迹,采用所述聚类中心点数据集对各个所述机械足进行冗余分解,获得各个所述机械足的冗余最优解,并根据各个所述冗余最优解对所述四足机器人进行状态修正。
46、本发明还提供了一种电子设备,所述设备包括处理器以及存储器:
47、所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;
48、所述处理器用于根据所述程序代码中的指令执行如上任一项所述的四足机器人的状态修正方法。
49、本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质用于存储程序代码,所述程序代码用于执行如上任一项所述的四足机器人的状态修正方法。
50、从以上技术方案可以看出,本发明具有以下优点:在对四足机器人进行运动控制过程中,响应于针对四足机器人的启动操作,初始化四足机器人的原始时间序列并生成目标时间序列,从而通过生成新的时间序列可以保证四足机器人的四个机械足具有共同时间参考值,以提高运动的控制准确性,以及信号反馈的时间同步性,减少延时误差;接着获取四足机器人的历史修正数据集,并采用历史修正数据集对目标时间序列进行数据预处理,生成四足机器人的工况数据集,从而通过基于四足机器人自身历史修正操作对应的历史修正数据集对目标时间序列的预处理,减少对于外部反馈信号的依赖性,并提高运动控制的预测准确度;接着获取四足机器人中各个机械足的冗余机械足参数,并采用工况数据集对各个冗余机械足参数进行聚类计算,获得聚类中心点数据集,从而通过对冗余机械足参数进行聚类计算,可以将工况数据集与冗余机械足参数相似的样本数据自动归类到一个类别中,并且可以通过采样与聚类的结合计算,使得数据消耗达到最小,提高数据处理效率以及聚类准确性,从而在运动控制过程中减小反馈误差;接着建立四足机器人的实际工况轨迹,采用聚类中心点数据集对各个机械足进行冗余分解,获得各个机械足的冗余最优解,并根据各个冗余最优解对四足机器人进行状态修正,从而通过冗余分解计算快速获得最优解任务对应的冗余最优解,并基于冗余最优解对四足机器人进行及时且准确的状态修正。
- 还没有人留言评论。精彩留言会获得点赞!