智能小车控制系统
本发明涉及智能小车控制,尤其是涉及一种智能小车控制系统。
背景技术:
1、在智能时代,智能小车,也就是轮式机器人,已被广泛应用在工业、服务业、家庭等多种行业和领域。目前,智能移动小车的控制系统通常是由含有左右和前后控制键的遥控器、智能小车控制板和直流电机等组成,遥控器和小车控制板主要通过无线连接,操作者通过对遥控器上左右键的操作来实现智能小车的转向控制。然而,对于部分肢体残疾人群来说手动控制并不友好,虽然可以通过为操作者佩戴头戴陀螺仪,通过头部转动使头戴陀螺仪发出转向控制信号,根据转向控制信号实现只能小车的转向控制,但是这种控制方式对操作者的反应能力要求高,在复杂转弯场景下控制难度大。
技术实现思路
1、本发明的目的在于克服现有技术的缺点与不足,提供一种智能小车控制系统,能够降低小车转向控制的难度,操作者能够轻松控制智能小车。
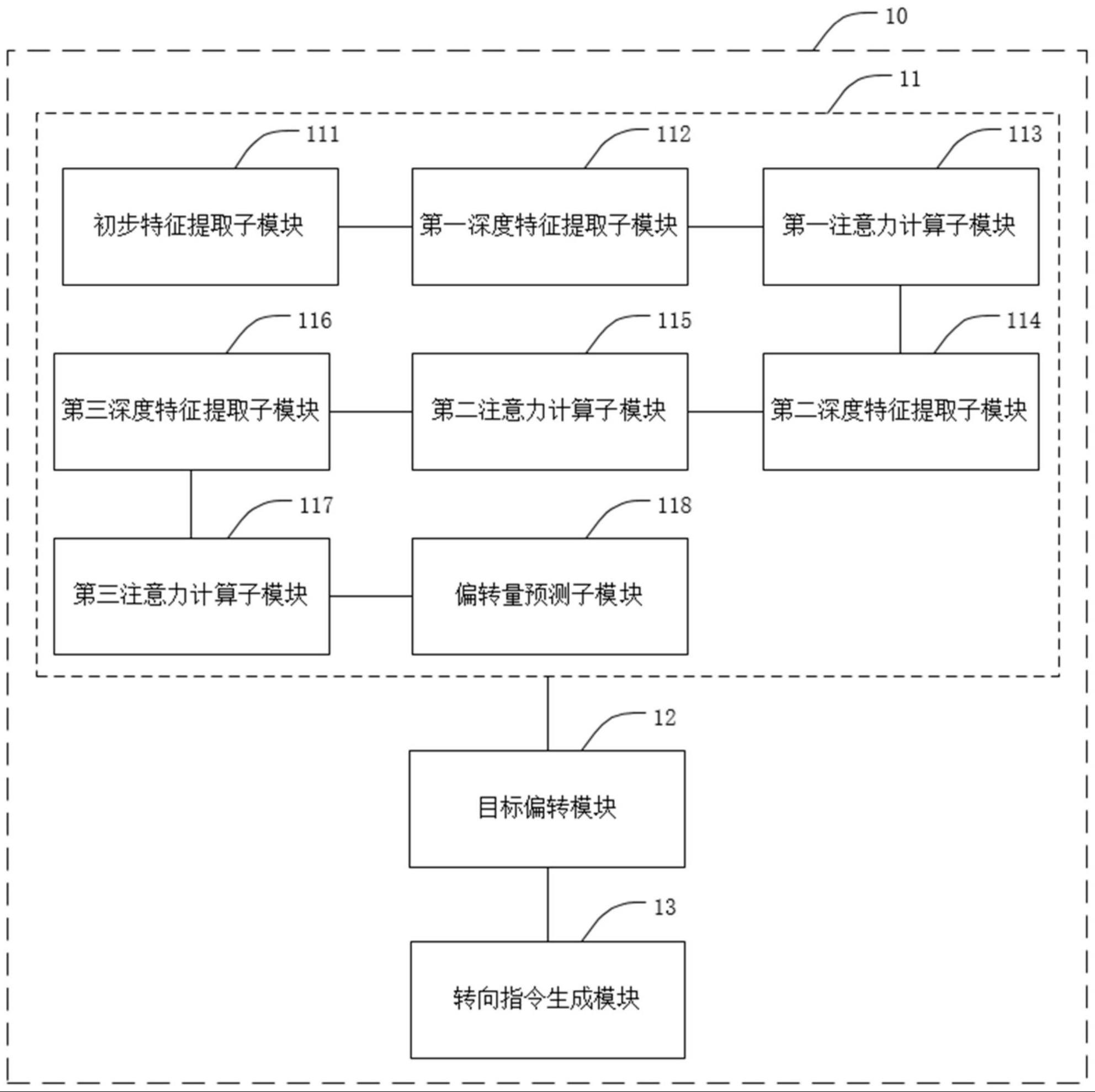
2、本发明是通过以下技术方案实现的:一种智能小车控制系统,包括信号处理器,所述信号处理器包括转向控制装置,所述转向控制装置包括预测偏转模块、目标偏转模块和转向指令生成模块;
3、所述预测偏转模块,包括:
4、初步特征提取子模块,用于获取待处理的实景图像信号,对所述实景图像信号卷积后进行最大池化,得到初步图像特征;
5、第一深度特征提取子模块,用于对所述初步图像特征进行第一深度特征提取,得到第一深度图像特征;
6、第一注意力计算子模块,用于根据所述第一深度图像特征进行注意力权重计算,并通过该注意力权重对所述第一深度图像特征进行加权,得到第一深度注意力特征;
7、第二深度特征提取子模块,用于对所述第一深度注意力特征进行第二深度特征提取,得到第二深度图像特征;
8、第二注意力计算子模块,用于根据所述第二深度图像特征进行注意力权重计算,并通过该注意力权重对所述第二深度图像特征进行加权,得到第二深度注意力特征;
9、第三深度特征提取子模块,用于对所述第二深度注意力特征进行第三深度特征提取,得到第三深度图像特征;
10、第三注意力计算子模块,用于根据所述第三深度图像特征进行注意力权重计算,并通过该注意力权重对所述第三深度图像特征进行加权,得到第三深度注意力特征;
11、偏转量预测子模块,用于对所述第三深度注意力特征进行全局平均池化后进行偏转量预测,得到预测偏转量;
12、所述目标偏转模块用于获取实际偏转量,分别对所述预测偏转量和所述实际偏转量进行加权后相加,得到目标偏转量;
13、所述转向指令生成模块用于根据所述目标偏转量生成相应的转向控制指令。
14、相对于现有技术,本发明的智能小车控制系统通过对智能小车前景方向上的实景图像进行图像特征提取,根据实景图像的图像特征预测偏转量,通过预测偏转量结合根据操作者头部动作产生的实际偏转量来辅助操作者进行小车的转向控制,由此,降低了小车转向控制的难度,使操作者在面对不同的转弯场景时能够更轻松地控制智能小车成功转弯。并且,在提取实景图像的图像特征中,对实景图像进行多次深度特征提取,并在每次深度特征提取后通过注意力权重对所提取的深度特征进行特征增强,由此能够提高特征图之间相互依赖关系,以提高图像特征提取的精准度,从而提高辅助驾驶的准确率。
15、进一步地,所述第一深度特征提取子模块用于对所述初步图像特征下采样后进行3次连续的分组卷积,得到第一深度图像特征;
16、所述第二深度特征提取子模块用于对所述第一深度注意力特征下采样后进行7次分组卷积,得到第二深度图像特征;
17、所述第三深度特征提取子模块用于对所述第二深度注意力特征下采样后进行3次分组卷积。
18、进一步地,所述下采样包括如下步骤:
19、对所述初步图像特征或所述第一深度注意力特征或所述第二深度注意力特征进行通道划分,得到两个不同通道的图像特征;对其中一通道的图像特征进行步长为2的深度可分离卷积和批标准化,再进行标准卷积和批标准化;对另一通道的图像特征进行标准卷积和批标准化后,进行步长为2的深度可分离卷积和批标准化,再进行标准卷积和批标准化;将两个不同通道所提取的图像特征在通道上进行拼接;对该拼接的图像特征进行通道混洗,得到下采样图像特征。
20、进一步地,所述分组卷积包括如下步骤:
21、对所述下采样得到的图像特征进行通道划分,得到两个不同通道的图像特征;对其中一通道的图像特征进行标准卷积和批标准化后,进行步长为1的深度可分离卷积和批标准化,再进行标准卷积和批标准化;将该通道所提取的图像特征与另一通道的图像特征在通道上进行拼接;对该拼接的图像特征进行通道混洗,得到分组卷积图像特征。
22、进一步地,所述注意力权重计算包括如下步骤:
23、对所述第一深度图像特征或所述第二深度图像特征或所述第三深度图像特征在通道维度上进行全局平均池化;对池化后的图像特征进行一维卷积;对卷积后的图像特征通过响应函数进行归一化,得到每一通道的注意力权重。
24、进一步地,所述目标偏转量的表达式为:
25、d=αdpred+(1-α)ddeflect
26、其中,d为所述目标偏转量;dpred为所述预测偏转量;ddeflect为所述实际偏转量;α为权重参数,权重参数α随预测偏转量dpred的取值区间增大而增大。
27、进一步地,还包括专注度控制装置,所述专注度控制装置包括:
28、频率分割模块,用于获取待处理的eeg信号,对所述eeg信号进行频率分割,到多个eeg分频信号;
29、功率特征计算模块,用于对每一所述eeg分频信号进行功率谱密度计算,得到每一eeg分频信号的功率特征;
30、能量特征计算模块,用于根据每一所述eeg分频信号的功率特征计算每一所述eeg分频信号的能量值,得到每一所述eeg分频信号的能量特征;
31、专注度计算模块,用于通过以线性函数为核函数的支持向量机对所有所述eeg分频信号的能量特征进行专注度计算,得到专注度值;
32、车速指令生成模块,用于根据所述专注度值计算目标车速,根据所述目标车速生成对应的车速控制指令。
33、进一步地,还包括眨眼控制装置,所述眨眼控制装置包括:
34、带通滤波模块,用于获取待处理的eog信号,对所述eog信号进行带通滤波,得到eog降噪信号;
35、一阶差分模块,用于对所述eog降噪信号中每个采样点的幅度值进行差分处理,得到一阶差分信号;
36、归一化模块,用于对所述一阶差分信号进行归一化;
37、二阶差分模块,用于对归一化的一阶差分信号再次进行差分处理,得到二阶差分信号;
38、波峰识别模块,用于确定所述二阶差分信号中最小值对应的采样点的下一采样点为波峰点;
39、单眨眼识别模块,用于若仅存在一个波峰点,且该波峰点的幅度值大于幅度阈值,则确定所述eog信号为单眨眼信号;
40、双眨眼识别模块,用于若存在多个波峰点,且有相邻波峰点的采样时间间隔小于间隔时间阈值,且该两个波峰点间的能量值均大于能量阈值,则确定所述eog信号为双眨眼信号;
41、指令生成模块,用于根据所述单眨眼信号或所述双眨眼信号生成相应的控制指令。
42、进一步地,归一化模块用于若所述一阶差分信号中一采样点对应的幅度值大于0,则归一为1;若所述一阶差分信号中一采样点对应的幅度值等于0,则归一为0;若所述一阶差分信号中一采样点对应的幅度值小于0,则归一为-1;
43、对于幅度值归一为0的采样点,若其下一个采样点对应的数值大于等于0,则将当前采样点对应的幅度值归一为1;若其下一个采样点对应的幅度值小于0,则将当前采样点对应的幅度值归一为-1。
44、进一步地,指令生成模块用于根据双眨眼信号生成启动控制指令或停止控制指令。
45、为了更好地理解和实施,下面结合附图详细说明本发明。
- 还没有人留言评论。精彩留言会获得点赞!