一种分布式驱动电动汽车执行器的横纵向故障检测方法
本发明涉及电动汽车故障诊断,尤其涉及一种分布式驱动电动汽车执行器的横纵向故障检测方法。
背景技术:
1、随着人们生活水平的提高,我国的汽车保有量迅速上升,但污染问题、能源问题也随之而来。为解决这些问题,国家开始大力发展电动汽车。电驱动系统是电动汽车关键部分,而驱动电机又是驱动系统的核心。永磁同步电机具有较高的功率密度和效率,在电动汽车上具有很大应用潜力。但是车辆行驶过程中电机的热负荷较高,温度上升会引起绝缘层损坏,容易发生漏电短路故障,同时高温会使电机发生退磁故障。另外,车辆行驶环境比较复杂,使得电机受到频繁的冲击,也会增加驱动电机的故障率,所以有必要对驱动电机进行故障检测。
2、线控转向取消了复杂的传动系统,推进了汽车轻量化、智能化、网联化,可是同样需要较高功率的力反馈电机和转向执行电机。转向电机在车辆行驶过程中频繁、高功率工作,使得转向系统的故障率提高,所以对于转向系统的故障检测也十分必要。现在大多数电动汽车容错控制都需要车辆的故障信息,不同的检测参数对最终获取的故障信息准确度都有影响。多数学者对于电机的故障检测只采用单一要素进行检测,这有可能出现误判断的情况。这时控制器收到错误的故障信息,就会产生错误的控制指令,使得车辆容错控制出现问题,甚至造成严重后果。
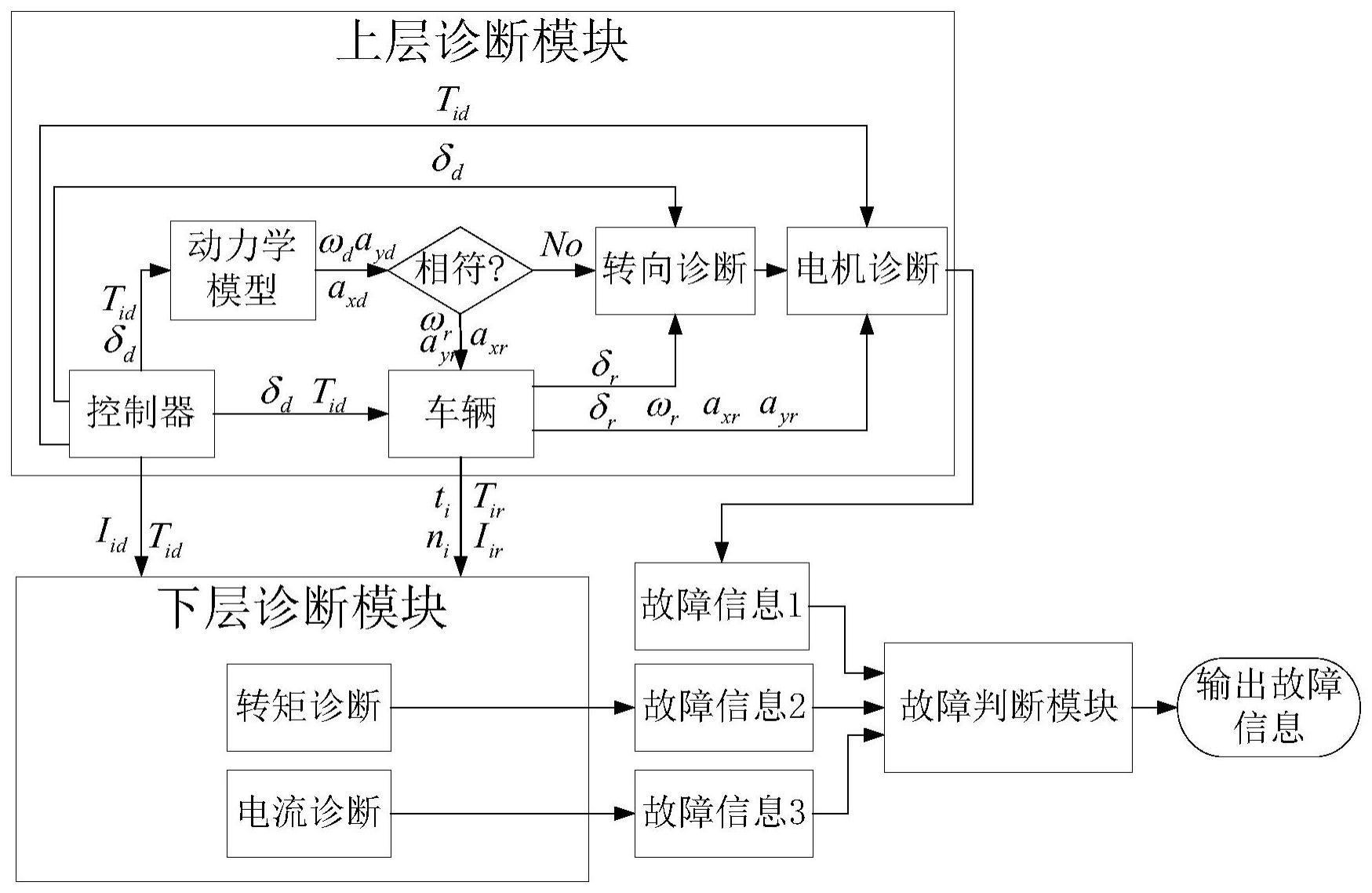
3、为了避免这一情况,本发明综合考虑横向与纵向的故障检测,采用分层式故障检测方法,上层故障检测模块判断车辆行驶状态是否正常,下层故障检测模块判断各个电机的故障情况,旨在防止出现单一要素错误判断的情况,来提高行车安全性。
技术实现思路
1、本发明的目的是针对背景技术中存在的问题,提出一种在汽车行驶过程中,可以分层次地检测出汽车转向系统和各个驱动电机的故障信息并发送给控制器,方便控制器能及时进行容错控制,以保证行车安全性、稳定性和动力性等的分布式驱动电动汽车执行器的横纵向故障检测方法。
2、本发明的技术方案:一种分布式驱动电动汽车执行器的横纵向故障检测方法,包括如下步骤:
3、s1:构建由七自由度动力学模型、控制器和车辆监测传感器所组成的上层诊断模块,通过输入期望转矩和期望转角至包括由车身纵向、横向、横摆及四个车轮的自由度所组成的七自由度动力学模型中,然后计算得出车辆的期望状态量,将期望状态量与车辆监测传感器测得的实际车辆状态量进行对比,得到对比数据为故障信息1;
4、s2:构建驱动力矩诊断单元、控制电流诊断单元、控制器和车辆监测传感器所组成的下层诊断模块,通过驱动力矩诊断单元将各轮期望力矩和传感器实际测得的力矩进行对比,评判各个驱动电机状态,得到评判结果为故障信息2;通过控制电流诊断单元将理想电流大小和实际测得电流大小进行比较,得到各个驱动电机状态,得到对比结果为故障信息3;
5、s3:构建故障判断模块,将s1和s2中得到的故障信息1、2、3输入至故障判断模块中,经故障判断模块判定后,得到最终故障检测结果。
6、优选的,所述s1中的七自由度动力学模型的车辆纵向、横向、横摆以及四个车轮的转动相互关系表示为:
7、
8、x=[vx vy ω]t;u=[tfl tfr trl trr δ]
9、其中:x表示状态变量、u表示输入变量、vx表示车辆纵向速度、vy表示车辆侧向速度、ω表示车辆横摆角速度,tfl、tfr、trl、trr分别代表车辆左前轮、右前轮、左后轮、右后轮四个车轮的转矩,δ表示前轮转向角;
10、所述s1中的车辆动力学模型包括车辆的纵向、侧向和横摆运动方程组以及四个车轮的力矩平衡方程。
11、优选的,所述s1中的计算所得车辆期望状态量包括车辆期望纵向加速度侧向加速度和横摆角速度ωd,传感器测得实际状态量包括车辆实际纵向加速度axr、侧向加速度ayr和横摆角速度ωr;
12、所述转向诊断的问题判断方式如下:
13、车辆行驶状态出现异常时,先检测输出转角δr和期望转角δd的相符情况;
14、若是相符,则判断转向系统无故障,只有驱动电机有故障;
15、若不等,将输出转角δr和各轮期望驱动力矩tid输入动力学模型,计算得到a′xr、a′yr、ω′r,并和测得的实际axr、ayr、ωr对比,若是相符,则判断只有转向系统故障,否则判断转向系统和驱动电机均有故障,达到对车辆的横向故障检测,得到故障信息1。
16、优选的,所述s2的驱动力矩诊断单元的各轮期望力矩由控制器根据驾驶员的意图而计算得出,所得的各轮期望力矩和传感器实际测得的力矩进行对比得到电机状态,具体为:
17、定义力矩故障因子当|tid|>ξ4时,设定阈值σ4,若δti≤σ4,则认为第i个驱动电机无故障,否则有故障;当|tid|≤ξ4时,设定阈值τ4,若δti≤τ4,则认为第i个驱动电机无故障,否则有故障;其中i=(1,2,3,4),分别代表左前轮、右前轮、左后轮、右后轮;
18、定义力矩故障程度因子当驱动电机i有故障时,输出θi,得到故障信息2。
19、优选的,所述s2的控制电流诊断单元为利用驱动电机控制电流理想值和实际值作对比,判断驱动电机状态,具体如下:
20、驱动电机工作情况分为恒转矩工作区间和恒功率工作区间,电机低速时恒转矩运行并输出大转矩,用于车辆的起步、加速、负荷爬坡以及频繁起或停;电机高速时输出恒定功率且有较大的调速范围,用于最高车速和超车;
21、驱动电机的期望力矩在短时间内设定为固定值,驱动电机的反电动势随温度变化而改变,为保持转矩输出,需进行控制电机补偿,具体如下:
22、电机温度为t时的电机空载反电势表示为:
23、e=[1+(t-20)αbr]e20
24、式中e20表示t=20℃时电机的空载反电势,t表示当前电机温度,αbr表示电机永磁体的可逆温度系数;
25、各驱动电机理想控制电流表示为:
26、
27、式中iid表示各驱动电机理想控制电流,ni表示各车轮转速,η代表传动效率;
28、电流故障因子:当|iid|>ξ5时,设定阈值σ5,若δii≤σ5,则认为第i个驱动电机无故障,否则有故障;当|iid|≤ξ5时,设定阈值τ5,若δii≤τ5,则认为第i个驱动电机无故障,否则有故障。其中i=(1,2,3,4),分别代表左前轮、右前轮、左后轮、右后轮;
29、电流故障程度因子:当驱动电机i有故障时,输出ki,得到故障信息3。
30、优选的,所述s3中的故障诊断模块具体为:
31、若上层诊断出车辆只有转向系统出现故障,直接输出转向系统故障;
32、若上层诊断出转向系统和驱动电机均有故障,结合下层诊断,既输出转向系统故障又输出电机故障;
33、若上层诊断出电机出现故障,结合下层故障信息可以判断出故障电机位置及故障程度;
34、若三个故障信息出现冲突时,基于两个诊断模块同时出现故障的概率很低这一假设,认为三个故障信息中信息意义相同的两个故障信息所代表的诊断结果为正确,例如:故障信息1显示驱动电机有故障,故障信息2显示无故障,故障信息3显示第i个电机有故障,那么最终判断电机i有故障。
35、与现有技术相比,本发明具有如下有益的技术效果:
36、采用的横纵向、分层式诊断方法提高了诊断准确性,采用多要素判断的方法,提高了系统冗余度,以保证当某一故障信息出现错误时,还可以通过其他信息准确检测出具体故障点,方便控制器实时获得转向系统和各驱动电机故障情况并采取容错控制,以提高行车安全性、动力性、稳定性等。
- 还没有人留言评论。精彩留言会获得点赞!