自巡航土壤检测路径规划、在线监测、评估方法及装置
本发明属于土壤检测,具体涉及一种自巡航土壤检测路径规划、在线监测、评估方法及装置。
背景技术:
1、土壤监测与评估可以获取土壤肥力、适宜作物种类、土壤污染程度等信息,协助制定科学合理的土壤改良方案,对于农业生产、环境保护、社会经济发展有着重要意义。现有土壤成分监测多以传感器或仪器取样形式,其中土壤传感器覆盖范围有限,检测范围小,导致大面积数据采集需要布设的节点数量巨大,为此,现有技术中提出了搭载在巡航车或无人机上的取样或检测设备来改善大面积土壤区域监测问题。
2、但其主要缺陷在于:土壤样品通常只反应采样点周围一定范围内的土壤性质,因此系统了解土壤污染情况需要根据区域特征科学选定采样间隔,而现有巡航路径规划方法不能根据待测土壤区域范围、障碍物位置和采样需求进行规划,土壤节点布设不够合理,无法满足不同土壤区域检测适配性需求,同时,路径规划方法采用rrt算法、prm算法等快速搜索随机数算法随机性太强,规划速度相对较慢,往往需要进行二次优化处理才能得到最优路径;路径规划方法采用a*算法等几何模型算法,每次计算重新计算起始点,计算量大,重复计算较多,导致特别是大面积土壤检测时,不能快速选取充分表征土壤状态的最优检测路径,影响检测效率和表征效果。
3、其次,现有基于卫星等障碍物识别方法对大型障碍物的识别效果较好、对小型障碍物识别效果不足,现有自巡航土壤检测路径规划方法未依据小型障碍物避障修正检测路径,存在撞损风险,影响检测效率。
4、其次,单一仪器可测量土壤成分参数少,取样检测需要对土壤样品进行预处理,仅适用于特定类型土壤,精确度易受水分、盐分、温度等因素影响,精确量化土壤重金属元素含量往往需要采集深层样品,导致检测耗时长且后续处理繁琐、无法同时获取多重金属元素信息。
5、光学检测技术具备非接触性、不受电子干扰、灵敏度高等优点,且近红外光谱波段可以有效包含污染程度较高的几种重金属元素,通过测量的一张光谱图可以同时得到多种重金属元素含量数据,检测方式简单,无需对样品进行预处理,且检测过程对样品无破坏,具备数据获取速度快的优势,但在地面复杂的情况下特别是移动过程中,载体倾斜或采样距离不适将影响近红外光谱成像,其分辨率较小也制约了在线监测应用的精准性。
6、此外,根据检测结果,以重金属污染指数和单项重金属元素最大污染指数获得的当前土壤污染情况评价结果较为笼统,不利于针对性分析土壤重金属含量的发展趋势和影响,影响自动化土壤监控管理工作。
技术实现思路
1、本发明旨在至少在一定程度上解决上述技术问题之一,本发明提供一种自巡航土壤检测路径规划、在线监测、评估方法及装置,可以依据区域特征,快速自行选取能充分表征土壤状态的最优巡航检测路径,并基于高精光学检测和步态优化在线监测,能够进一步针对性分析区域土壤污染,提高特别是大面积不同土壤区域监测与评估的适配性、精准性和自动化效率。
2、本发明解决其技术问题所采用的技术方案是:
3、一种自巡航土壤检测路径规划方法,其方法包括:
4、获取土壤检测区域的区域特征并以此确定采样点数n和采样单元面积a,将土壤检测区域等分为n个面积为a的大栅格,将大栅格等分为若干小栅格;
5、获取大型障碍物位置,将大型障碍物所在小栅格标记为障碍物栅格,其余小栅格标记为自由栅格;
6、按蛇形/回形路径遍历各大栅格,确定各大栅格的起点小栅格和终点小栅格;
7、获取自由栅格与终点小栅格之间的距离vj,自由栅格与最近障碍物之间的距离uj,避开障碍物栅格下,以起点小栅格到终点小栅格途径的自由栅格数量最少,各自由栅格的vj/uj最小,为优化目标,获得检测路径。
8、进一步的,所述土壤检测区域的区域特征包括土壤区域变异程度、土壤检测区域尺寸和大型障碍物尺寸;
9、若土壤区域变异程度低,则上式中,n为采样点数,t为选定置信水平95%自由度下的t值,s2为均方差,d为可接受的绝对偏差,a为采样单元面积,l为大型障碍物最长边长;
10、若土壤区域变异程度高,则上式中,n为采样点数,t为选定置信水平95%自由度下的t值,cr为变异系数,m为可接受的相对偏差,a为采样单元面积,l为大型障碍物最长边。
11、进一步的,将土壤检测区域等分为p*q个大栅格,则上式中,p为水平方向上大栅格的数量,q为竖直方向上大栅格的数量,m为土壤检测区域的水平方向边长,n为土壤检测区域的竖直方向边长,l为大型障碍物最长边长。
12、进一步的,按左方、右方或前方方向前进,依次标记由起点小栅格前进j个自由栅格的序号为自由栅格周围无序号大于自身序号的下一自由栅格时标记终止,按到达终点小栅格的序号最小确定包括此序号的顺序序列,获得顺序序列集合,以vj/uj最小值为优先自由栅格确定顺序序列集合中的最优顺序序列,以最优顺序序列对应的自由栅格作为检测路径。
13、进一步的,设定障碍物安全距离d1,障碍物临界距离d2,检测装置沿检测路径自巡航时,获取障碍物到检测装置的距离d3;
14、若d1≤d3,则检测装置沿检测路径继续前进;
15、若d2≤d3<d1,则判断障碍物位于检测装置左前方或右前方,检测装置向相反方向前进进行避障;
16、若d2>d3,且障碍物未位于检测装置后方,则检测装置后退进行避障;
17、检测装置避障后,获取避障前后的位置距离d4;
18、若d4>2个小栅格边长,则以避障后的位置作为起点小栅格重新规划检测路径;
19、若d4≤2个小栅格边长,则检测装置前往已规划好的最近检测路径。
20、一种自巡航土壤在线监测方法,沿上述任意一项所述检测路径,检测每个自由栅格所在土壤获得近红外光谱图,并以此获得土壤重金属含量检测数据。
21、一种自巡航土壤在线监测装置,包括多足机器人,所述多足机器人设有运动控制器、分析控制器、近红外光谱成像仪和若干机械腿,所述运动控制器用于基于上述自巡航土壤在线监测方法,控制若干机械腿运行,沿所述检测路径自巡航,所述分析控制器用于基于上述自巡航土壤在线监测方法,控制近红外光谱成像仪运行,检测获得土壤重金属含量检测数据。
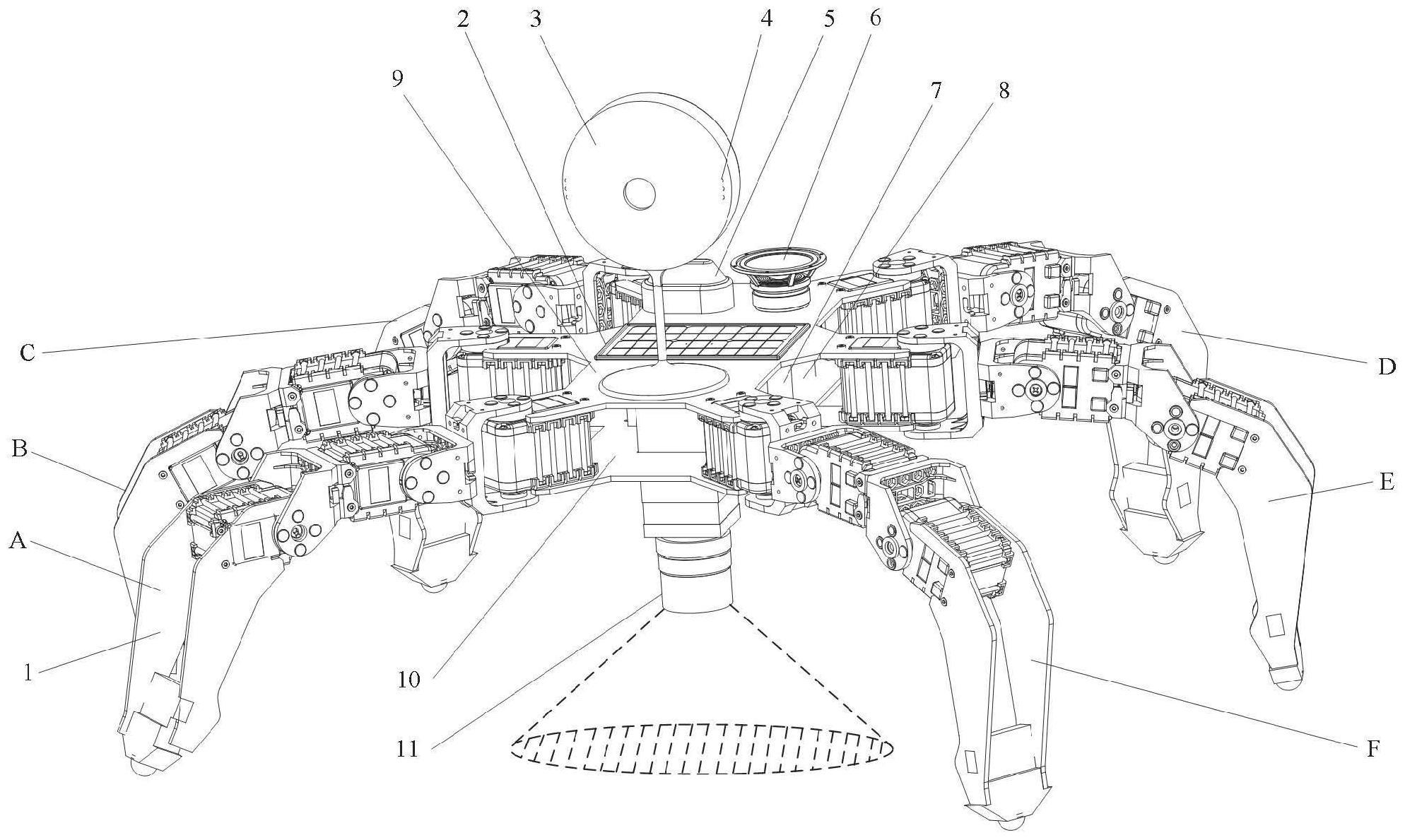
22、进一步的,所述多足机器人为六足机器人,六足机器人包括基节体、在基节体上呈放射分布的六个机械腿,所述机械腿包括至少一个第一驱动舵机和第二驱动舵机,所述第一驱动舵机能够驱动机械腿相对基节体在水平方向往复转动,所述第二驱动舵机能够机械腿相对基节体在竖直方向往复转动。
23、进一步的,六足机器人的前进或后退行走步态控制方法包括:
24、基节体左上方和右下方的机械腿作为第一组机械腿,在水平方向上对向转动并使其足端向行走方向移动,其余机械腿足端不动;
25、随后,基节体右上方和左下方的机械腿作为第二组机械腿,在水平方向上对向转动并使其足端向行走方向移动,其余机械腿足端不动;
26、随后,基节体左方和右方的机械腿作为第三组机械腿,在水平方向上对向转动并使其足端向行走方向反向移动,其余机械腿足端不动;
27、各机械腿在水平方向上依次转动复位至初始状态,第一组机械腿、第二组机械腿、第三组机械腿重复依次动作。
28、进一步的,六足机器人的左转或右转步态采用三角步态控制方法。
29、进一步的,所述多足机器人设有太阳能电池板、与运动控制器相连的摄像装置和警示装置。
30、进一步的,所述运动控制器包括第一核心控制器、与第一核心控制器相连的第一电源模块、第一智能网关、运动模块和路径规划模块,所述第一电源模块与太阳能电池板相连,所述运动模块连接有陀螺仪平衡模块和机械腿驱动模块,所述机械腿驱动模块用于驱动机械腿运行、控制六足机器人位姿使近红外光谱成像仪保持水平;
31、所述路径规划模块连接有卫星通信模块、避障模块和路径决策模块,所述卫星通信模块连接有地图模块和辅助定位模块,用于与卫星通信获取土壤检测区域的地图信息和六足机器人的位置信息;所述避障模块连接有图像采集模块、避障决策模块和第一通信模块,所述图像采集模块与摄像装置连接获取障碍物信息,所述第一通信模块用于连接上位机;所述路径决策模块用于结合路径规划模块和避障模块进行路径决策。
32、进一步的,所述分析控制器包括第二核心控制器、与第二核心控制器相连的第二电源模块、第二智能网关、光谱接收模块、光谱解析模块、数据处理模块和第二通信模块,所述第二电源模块均与太阳能电池板相连,所述光谱接收模块与近红外光谱成像仪相连,所述第二通信模块用于连接上位机。
33、进一步的,所述近红外光谱成像仪包括光源、rc光学系统、多级透镜,所述光源用于向待测土壤发射近红外光,经过土壤的近红外光依次经rc光学系统和多级透镜减弱偏振像差并转变为水平光束。
34、一种自巡航土壤在线评估方法,其方法包括:
35、基于上述自巡航土壤在线监测方法,获取土壤重金属含量检测数据;
36、在土壤数据库查询当前土壤区域土壤重金属含量历史数据;
37、若当前土壤区域无历史数据,则综合分析当前土壤区域污染程度;
38、若当前土壤区域有历史数据,则针对性分析当前土壤区域典型重金属元素污染程度;
39、分析后将分析结果上传至土壤数据库存储。
40、进一步的,若当前土壤区域无历史数据,则计算区域综合污染指数p综合={(piaver)2+(pimax)2}1/2,上式中,piaver为由土壤重金属含量检测数据获得的所有重金属元素污染指数平均值,pimax为由土壤重金属含量检测数据获得的单项重金属元素最大污染指数;
41、若p综合<1,则表明土壤无污染;若1<p综合≤3,则表明土壤中度污染;若p综合>3,则表明土壤重度污染,并上传至土壤数据库存储。
42、进一步的,若当前土壤区域有历史数据,则根据历史数据选择当前土壤区域含量最高的重金属元素t,计算
43、上式中,pi为土壤单元素污染指数,ci为土壤重金属含量检测数据中t元素含量,si为土壤中t元素含量标准限值,x为地质累计指数,cn为土壤重金属含量检测数据中某元素含量,bn为历史数据中某元素含量,plij为单一土壤点位污染负荷指数,n为参与评价的重金属元素数量,plia为区域土壤污染负荷指数,m为参与评价的土壤点位;
44、若plia<2,则表明土壤区域无污染或污染较轻,若plia≥2,则表明土壤污染程度较高。
45、与现有技术相比,本发明的有益效果是:
46、(1)自巡航土壤检测路径规划方法可以根据土壤检测区域的区域特征确定采样需求,依据vj/uj确定优先级,规划性强,求解时间快,耗能小,在采样点数据的选择使得检测结果能充分表征土壤重金属含量及污染程度的前提下,具备最短的采样检测路径,解决不同区域特别是大面积土壤检测的适配性和效率问题。
47、(2)自巡航土壤检测路径规划方法根据土壤检测区域的区域特征中的土壤区域变异程度、土壤检测区域尺寸和大型障碍物尺寸计算采样点数n和采样单元面积a,进一步提高大面积土壤检测的适配性。
48、(3)自巡航土壤检测路径规划方法可以根据障碍物安全距离和临界距离的设定,对障碍物避障,偏离原定检测路径后自行规划新检测路径,修正检测路径,进一步提高大面积土壤检测的适配性和效率。
49、(4)自巡航土壤在线监测方法基于近红外光谱图在线检测每个自由栅格所在土壤,遍历大栅格获得n个土壤重金属含量检测数据,实现能充分表征土壤的光学在线监测,解决土壤检测取样及处理导致耗时较长的问题,降低土壤污染检测和评估成本。
50、(5)自巡航土壤在线监测装置可以结合卫星地图信息、位置信息、地面环境信息,通过运动控制器控制机械腿运行沿检测路径移动、近红外光谱成像仪检测、分析控制器分析连贯进行,可以搭载智能网关与通信模块,进一步实现与卫星和pc端上位机系统通信,便于提高自动监测效率。
51、(6)自巡航土壤在线监测装置在地面复杂的情况下,前进或后退时总是移动对角线上的相应机械腿优化步态,减小机身晃动幅度,可以进一步配合多足机器人姿态使检测全程维持稳定,近红外光谱成像系统始终保持水平恒定状态,采样距离适宜,利于在线监测。
52、(7)自巡航土壤在线监测装置的近红外光谱成像系统搭载rc光学系统和多级透镜,提升近红外光谱接收器对光线信息的分辨率,进一步提高光学检测精度。
53、(8)自巡航土壤在线评估方法综合土壤区域历史数据,可以进行土壤污染人为因素分析,土壤污染重点点位分析,进而判定区域土壤污染程度,便于自动化土壤监控管理工作。
- 还没有人留言评论。精彩留言会获得点赞!